

こんにちは、インターステラテクノロジズ広報チームです。
「ペイターズドリーム MOMO4号機」のリターンの発送が遅れてしまい、ご迷惑をおかけしており申し訳ございません。11月から順次発送いたしますので、もうしばし、お待ちいただけたらと思います!
<「ペイターズドリーム MOMO4号機」クラファン報告会@東京を開催しました!>
今月6日(日)、都内にて「ペイターズドリーム MOMO4号機」のクラファン報告会を開催いたしました!前半はISTメンバーからの報告、後半はパトロンの皆様との懇親会です。ISTからは代表の稲川や、MOMO4号機プロジェクトマネージャの植松、浦安工場を拠点とするアビオ(電気通信、制御系)チームメンバーを中心に、8名程が参加しました。
また、当日は約30名のパトロンの皆様にお越しいただき、「ペイターズドリーム MOMO4号機」の打上げの結果や、緊急停止の原因や対策、さらには外ではお話していないここだけの開発裏話(!!)などをざっくばらんにお話させていただきました。
※なお、当日のライブ中継は会場のシステム不良により、実施できませんでした…。申し訳ございませんでした。


約1時間の報告会の最後に、IST代表の稲川から「ここで、皆様に発表があります!」とコメントが。
次に打上げる「MOMO5号機」のクラウドファンディングの開始と、今回は人気漫画「宇宙兄弟」とコラボレーションするという発表が会場内にアナウンスされました。
稲川:「いつも応援してくださる皆様に、一番最初にお伝えしました!」
宇宙兄弟作者の小山宙哉さんの応援コメント、クラファンの内容等をページをスクロールしながら会場の皆様に説明していると、なんとその場で早速2名申込が…!!
ISTメンバー:「もう寄附がはいってる!」
パトロンの方:「(寄附の)一番、いただきました!」
ISTメンバー:「早速ありがとうございます!!」
(会場、拍手!!)
一気に会場の熱量が上がった瞬間です(笑)
普段応援していただいている皆様へのサプライズ、成功してよかった!
▼「再び宇宙へ!みんなと宇宙兄弟のチカラでMOMO5号機を宇宙に送ろう!」
https://camp-fire.jp/projects/202761/
後半は、ISTメンバーとパトロンの皆様との立食形式の懇親会(今回、初めての試みです)。ドリンクや軽食を食べながら、とても近い距離で皆様と交流をさせていただき、メンバー一同より一層開発に邁進しようと思えました。
参加いただいた皆様からも、「エンジニアメンバーの方や、参加者同士でもお話できたのがよかった!」等というコメント等も。

最後はみんなで集合写真!「ペイターズドリーム MOMO4号機」の打上げ会場に設置していた寄せ書きシートとともに。
<MOMO5号機に向けて…「ペイターズドリーム MOMO4号機」の原因究明!>
MOMO5号機の開発を進めていますが、改めて、「ペイターズドリーム MOMO4号機」の打上げを振り返ります。
2019年5月に「宇宙品質にシフトMOMO3号機」というロケットの打上げ成功。国内で初めて、民間が開発・製造したロケットが宇宙空間へ到達しました。その後、連続成功を目指して2019年7月に打上げたのが「ペイターズドリームMOMO4号機」。
しかし、このMOMO4号機は、打上げ約64.3秒後に期待に搭載したコンピュータが異常を検知し、エンジンを自動で緊急停止し、警戒区域内の海面へ落下しました。
残念ながら2度目の宇宙到達は果たせず、ミッション成功もならずという結果でした。

この結果を重く受け止めながら、ここ数か月緊急停止の原因究明を進めてきました。
ペイターズドリーム MOMO4号機 実証発生原因究明および対策
詳細は上のPDFをみてもらえたらと思いますが、かなり専門用語も多く、用語に馴染みのない方にはわかりにくい箇所もあると思いますので、こちらでもまとめてみますね!
<考えられる原因>
MOMOには、地上とのデータのやりとりをする無線機が何種類か搭載されています。これらは安全にロケットが飛行しているか、ロケットの状態を確かめるために必要な機器たちです。
今回は、地上からのコマンド(指令)を受信する「VHF受信機」がなんらかの原因で動作しなくなったことが原因と推定されています。MOMO内に搭載された制御コンピュータは、このVHF受信機を通して地上からのコマンド(指令)を一定期間受信することができなかった場合、『地上からの制御ができなくなった!なにかある前に停止しよう!』と判断して、自動的にロケットを止めるように設計されています。安全性確保のための設計です。
今回の緊急停止は指定された時間、地上からのコマンドがなかったために制御コンピュータが停止を指示したことにより発生いたしました。
無線機が止まった理由は、完全には絞り込みきれませんでしたが、中でも可能性が高いのは以下の通りです。
①静電気・雷による電子部品故障
②VHF受信機のケーブルやコネクタが外れるか切れるかして電源が落ちた
特に、①の可能性については、フライト後の追加試験で、(静電気や雷の)放電を模擬したサージ(高電圧の電流)をVHF受信機のアンテナ端子に入力したところ、100%の確率で受信機がハングアップする(動作不能になる)ことが確認できています。
代表の稲川が、ロケットの雷・静電気対策のあれこれをnoteにまとめていますので、もしこちらもご興味がある方はご覧ください!
<「MOMO5号機」に向けた対策>
①サージ電流対策
上に記したように、静電気・雷によって生まれるサージへの電子部品の耐性を、専用のサージ発生器を使って電圧を変えながら調査していきます。並行して、地上の野外無線局などでも利用されているサージ除去用の電子部品をVHF受信機のアンテナ入力に追加し、かなり高電圧のサージを入力してもVHF受信機がハングアップしないか調べています。
また、VHF受信機やアンテナを複数個搭載することで、仮に一つがサージや故障で停止しても、他がバックアップして動作し続けられるような装置構成(冗長系といいます)に変更します。
氷結層を含む雲などサージが発生しそうな環境条件を回避するように、打上げ基準を見直していくこと、またそのような環境の推定方法を検討していきます。JAXA等でも、氷結層が発生した場合には打上げを延期するなどの対策をとっています。
②ケーブルやコネクタに不良品ができないような管理体制に
VHF受信機のケーブルが断線したりコネクタが外れたりしないように、それらの部品の作り方や機体への取付方法についてルール化を進め検査体制も強化して、不良品ができたりそれが誤って搭載されたりしないようにしていきます。
また、無線機器については、フライトに使うものはフライト時と同様の振動や温度状況でも問題なく動作するかの試験をしていきます。ロケットのフライトではかなりの振動が加わるので、実際の環境条件と揃えた状態での試験項目を追加しました。
これまでも、地上環境での動作確認試験はしていましたが、より実際の環境に近づけた動作検証をしていきます。
<「MOMO5号機」の開発状況>
アビオチーム(電気通信系を担当)を中心に上記の対策を進めながら、一方で、大樹町のロケット射場では「MOMO5号機」が着々と組みあがってきています。ついに、外装部分やタンク設置等の構造の組立が終わりました。
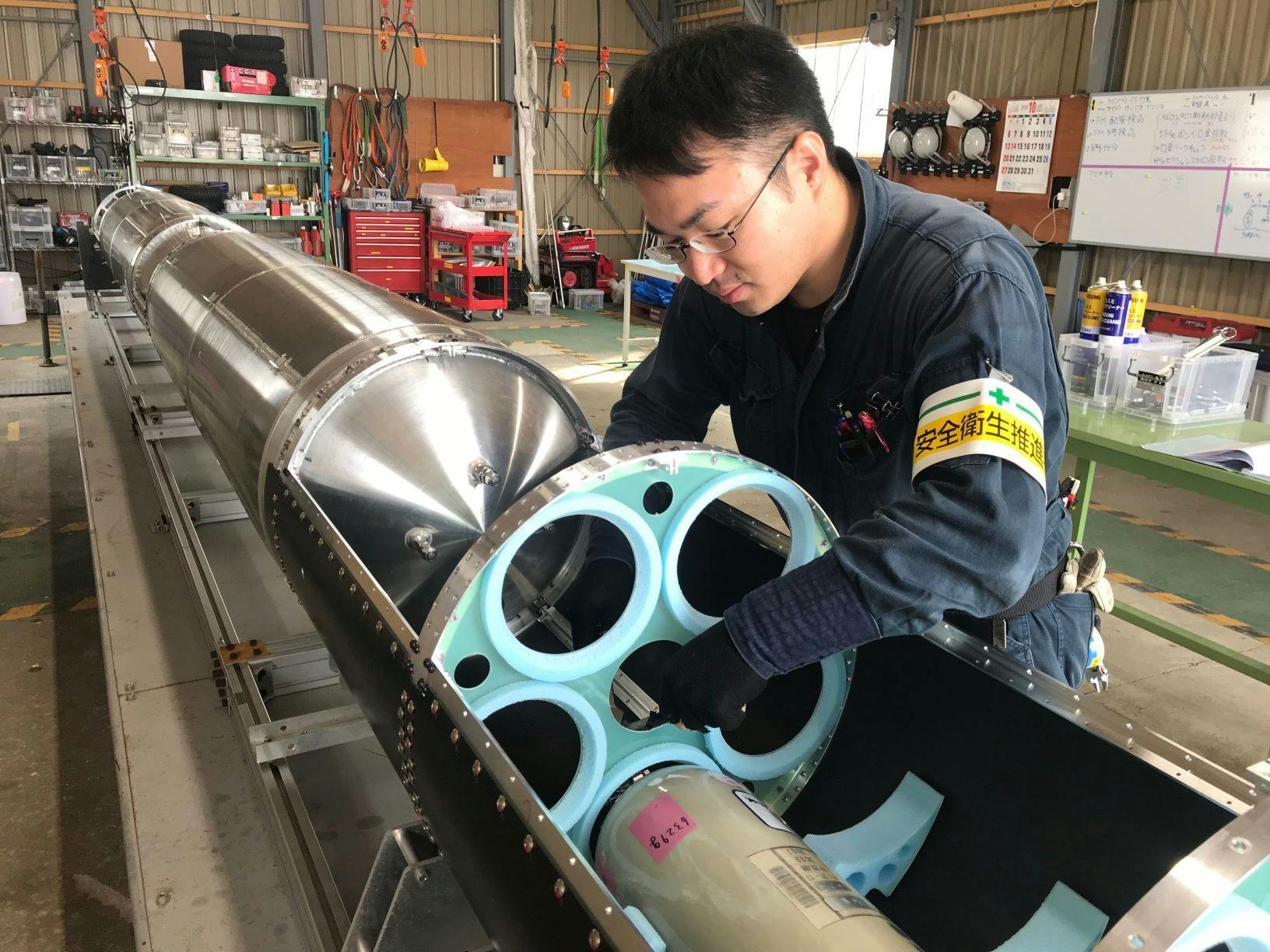
ロケットの燃料をエンジンに供給するヘリウムガスのタンクの設置(上の写真がその作業中)も終わり、ここからさらに内部の細かな構造を組み込んでいきます。この後は、バルブや配管部品、エンジンを組み込み、設置したタンク達とつないでいきます。その後、アビオチームへと機体を引き渡し、電気通信機器の組み込みをすると完成となります。
私たちは、安定的なロケット打上げを目指すべく、「ペイターズドリーム MOMO4号機」での学びを活かし、「MOMO5号機」の開発、対策活動を進めていきます。
これからも、皆様と一緒に挑戦し続けて行きたいと思いますので、引き続き応援いただけますよう、よろしくお願いいたします!
