



こんにちは。
プロジェクトの進捗報告をさせていただきます。
現在、プロジェクトは新型コロナウイルスの影響によりスケジュールに大幅な遅れが生じております。
スケジュール通りであれば、パラシュート制御装置の完成が見込まれている時期ではありますが、上記の影響で学校に登校することが禁止されており、開発することが困難な状況です。
学校再開の目途が立っていないため、プロジェクトの再開も目途が立たない状況です。
非常にもどかしい日々を送っておりますが、数ヶ月まえまでの進捗をここでお伝えしたいと思います。
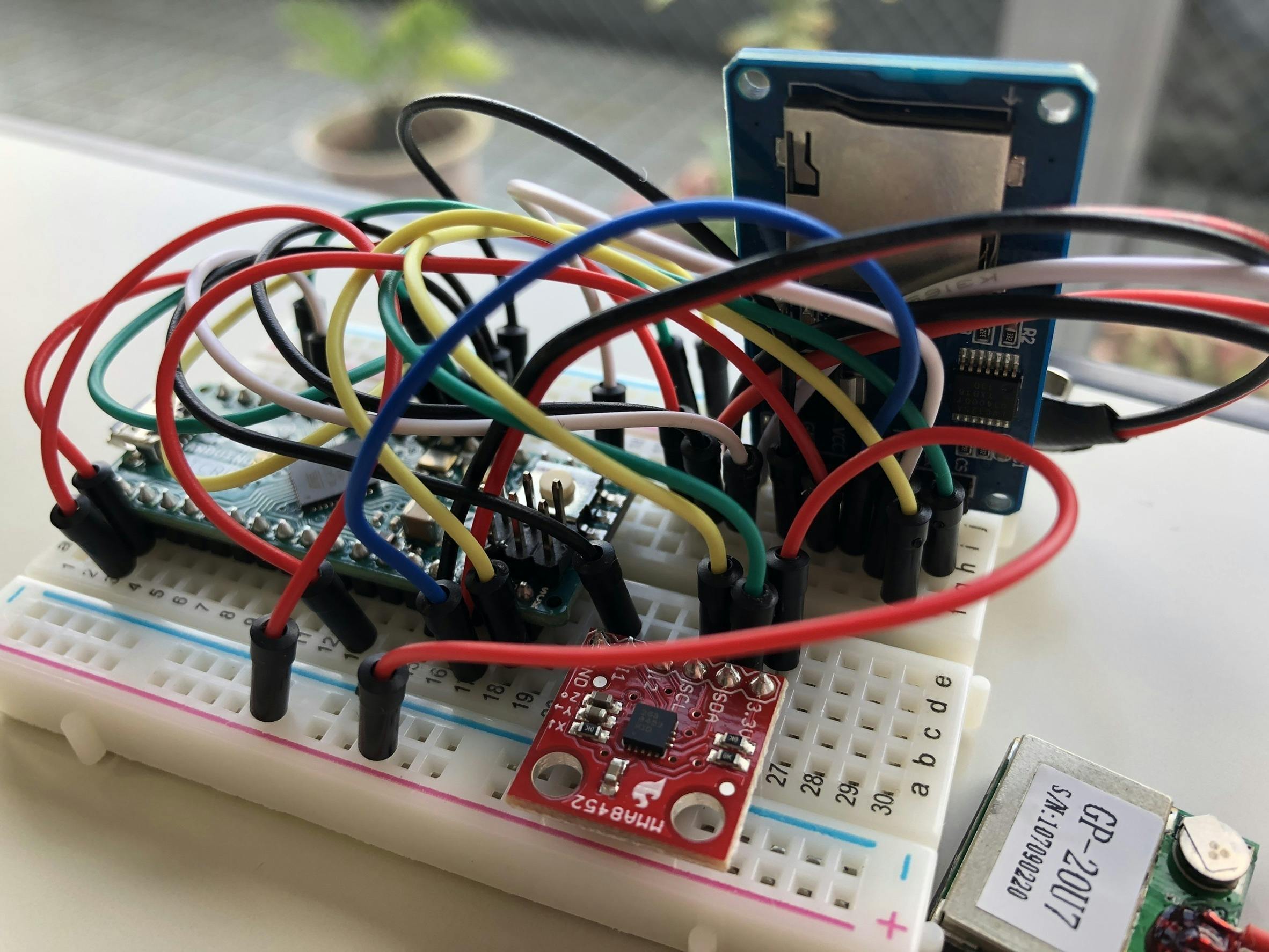
今回は、搭載するGPSロガーを開発したときの報告です。
このモジュールはGPS情報と加速度を取得して記憶媒体に保存するものです。
起動しながら持ち歩けば、通った位置情報のログが残ります。

上記の画像は、試しに持ち歩いてみた時の位置情報をマップにプロットしたものです。
(実際のデータは読みにくいテキストデータです)
屋内では取得できていませんが、屋外で通ったルートは完璧にわかります。GPS受信機の仕様書によると誤差は2mだそうです。
「次はこの装置をロケットに搭載して打ち上げてみよう!そうすれば打ちあがってパラシュートが開いてから落ちてくるまで、どんなルートを通ったかわかるぞ!」
わくわくしながら打ち上げに行きます。周りの安全を確保しカウントダウン開始!
近くで見ていた親子も応援してくれています。カウント0でエンジン点火!

2地点しか取れていない???
大きな音を立て打ちあがったロケットはまっすぐ空に!。。。は向かわず地面にまっすぐ突き刺さりました。
そうです。打ち上げ地点と墜落地点の位置情報が取れたのです。
何も積んでいないロケットはまっすぐ飛んだのに。
もちろん、装置の重さも計算してロケットは再設計しているので理論上はまっすぐ飛ぶはず。
現実はそう甘くないですね。
装置が載ることによってここまで難しくなるとは。課題が増えました。
その後は、装置を搭載できるロケットについて議論したり、パラグライダーの模型を買って参考にしてみたり、パラシュートの制御の仕方を議論したりしていた矢先のコロナ騒動。
皆様から頂いた活動資金、絶対に無駄にしたくはありません。
しかし、時間だけが過ぎていきます。お金が足りないと皆様にご支援いただいたこのプロジェクト、今は時間が足りません。時間が圧倒的に足りないので最終的な目標を変えざるを得ない可能性もあります。
しかし、コロナ騒動が収まれば必ず再開いたします。もう少しだけ見守っていただければ幸いです。

PS. かなり前の話ですが、モデルロケット従事者4級ライセンスを取得しました。
これでC型エンジンまで扱えます。(高度100~200m程度)
