

2019/12/11 15:47
昨日、本プロジェクトが400%の達成を記録しました。
パトロンの皆様より多大なご支援をいただき、あらためまして厚く御礼申し上げます。
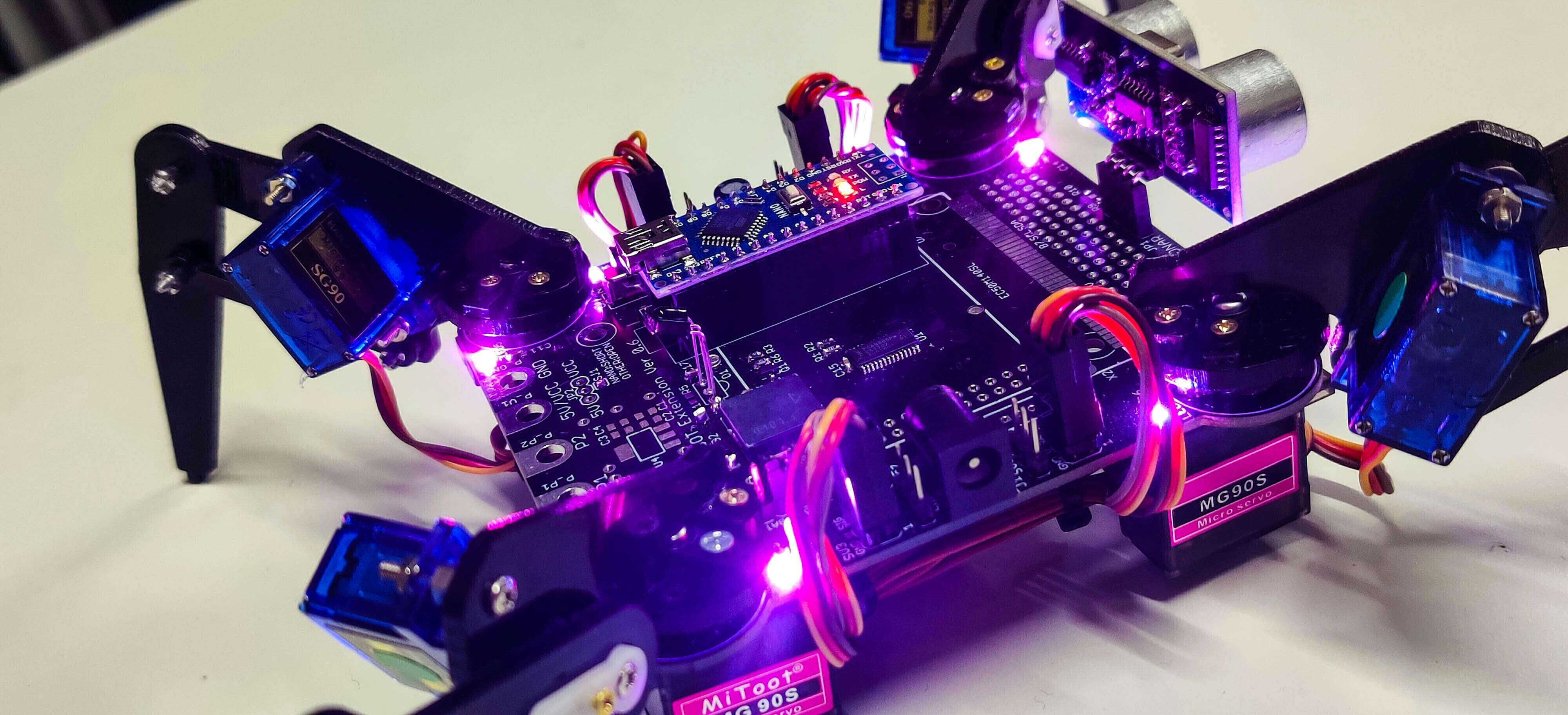
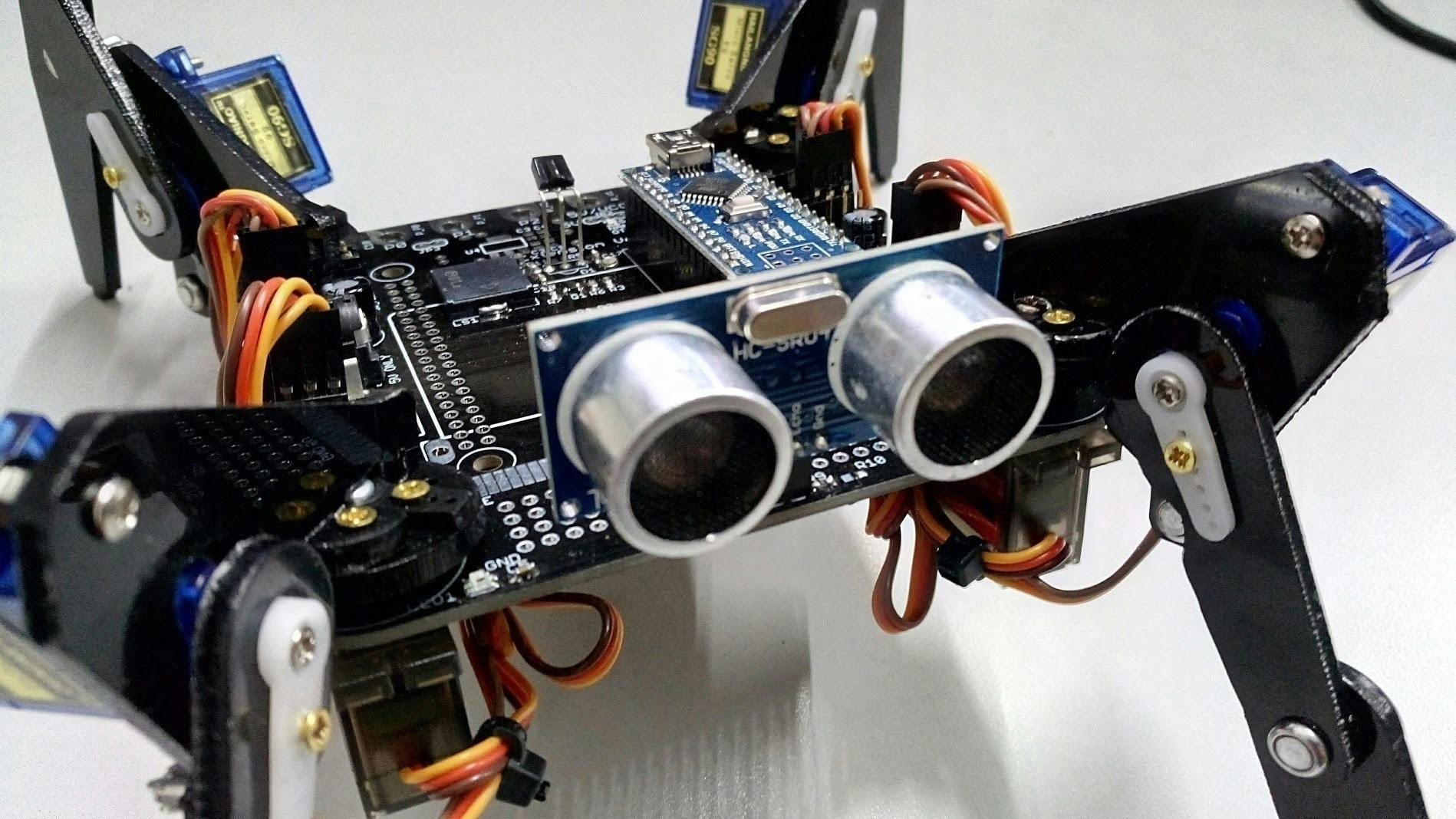
現在、クアッド・クローラーでのアナログリモコンの対応と最適化を進めております。
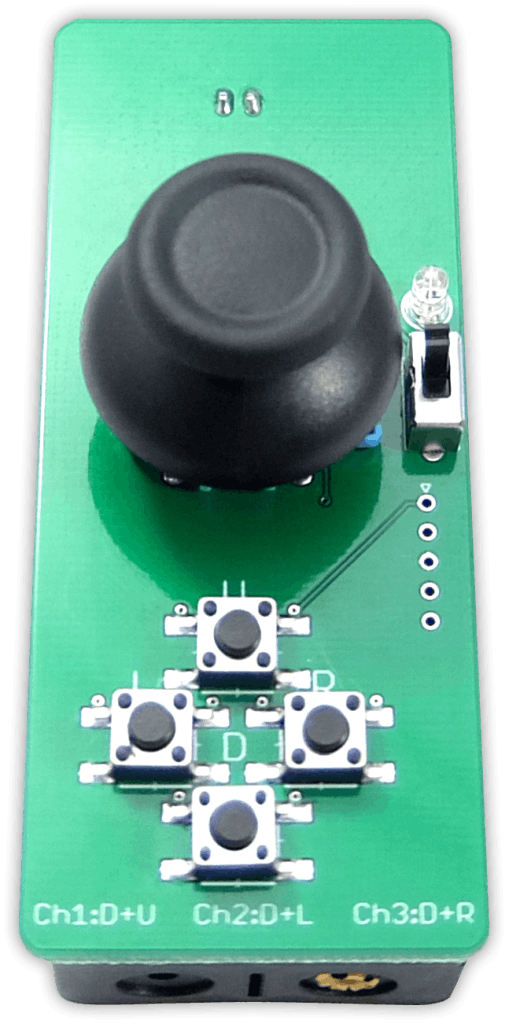 標準リモコンにくらべ、アナログリモコンの操作感はかなり良好で斜め入力で超信地旋回も可能です。ジョイスティック斜めで旋回し、倒す量で速さが変わり、まだまだ最適化が進んでいないためジタバタする動きがとてもかわいいです!
標準リモコンにくらべ、アナログリモコンの操作感はかなり良好で斜め入力で超信地旋回も可能です。ジョイスティック斜めで旋回し、倒す量で速さが変わり、まだまだ最適化が進んでいないためジタバタする動きがとてもかわいいです!
本体のファームウェアも随時改変を加えております。
現ファームウェアはスイッチONの後、サーボの電源が入りっぱなしになってしまうため1hくらいで バッテリーを消耗してしまうケースがありました。
新ファームでは、バッテリー保持のため、リモコン操作を終了するとサーボモータの電源を止めるよう調整しております。
多関節型4足歩行ロボット「クアッド・クローラー」 引き続きご支援よろしくお願いいたします。
