


遠隔農作業ロボット開発プロジェクトにご支援をしていただき、ありがとうございます。
2021年のプロジェクトの進捗を報告させていただきます。
みなさんから支援していただいたお金は、
・3Dプリンタ、3Dプリントに使用する樹脂の購入
・ロボットに使用するモータや電子部品、ネジなどの部品の購入
・部品を加工するためのドリルやワイヤストリッパ、ハンマーなどの購入
・設計や課題解決の方法を学ぶための技術書・教材の購入
・リターンの野菜の発送
に使用させていただいております。

3DCAD&3Dプリンター(コンピュータ上での部品を設計・デザインし、立体物を造形)
ご支援していただいたお金で3Dプリンターを購入させていただきました。
3Dプリンターというのは、一筆書きするように溶かした樹脂で一層ずつ層を作っていき、その層を何度も積み重ねていくことで歯車といった複雑な形状の立体物を作ることができる機械です。
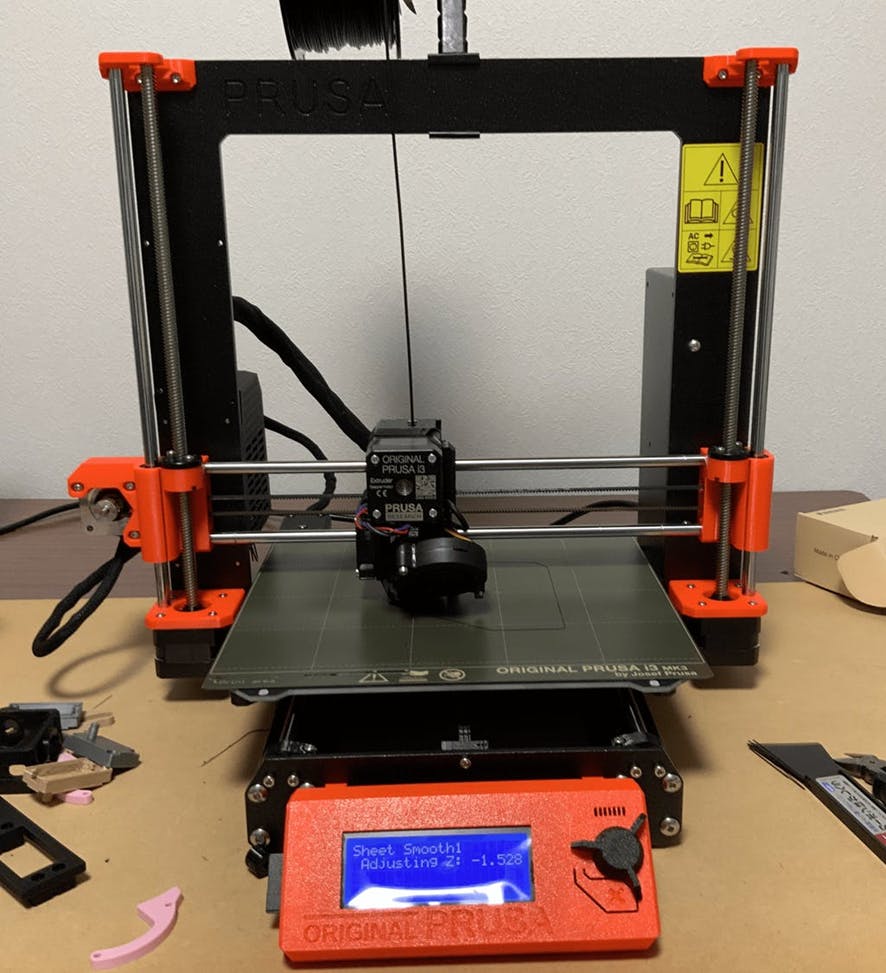 キットから組み立てた3DプリンターPrusaMk3S+
キットから組み立てた3DプリンターPrusaMk3S+
使い始めた当初は、調整に失敗してエラーが出ることも多く、試行錯誤を繰り返しました。
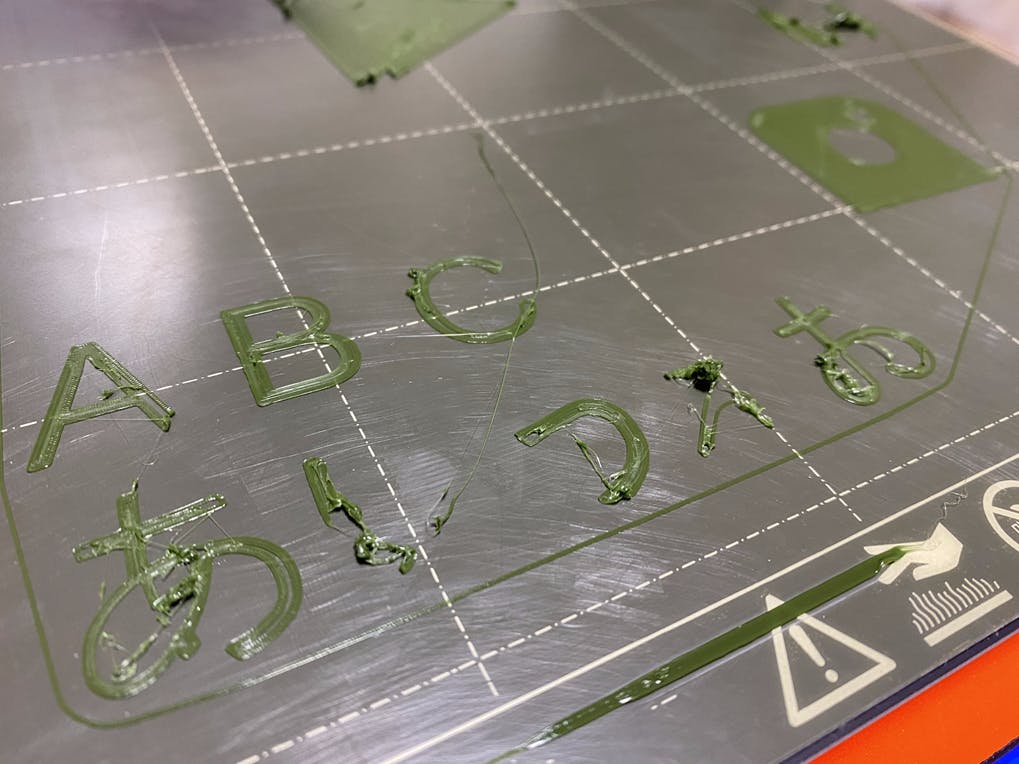 印刷失敗例、印刷するテーブルに樹脂が定着していない。
印刷失敗例、印刷するテーブルに樹脂が定着していない。
そこで、日本よりも活発に議論が行われている海外の3Dプリンターグループに自分が抱えている問題を投稿することで、解決策などの情報を集めるようにました。今では一般的なエラーには自力で対応できるようになりました。(海外の3Dプリンターのグループ)
また、7月から3DCADソフト「Fusion360」の使い方の勉強を始めました。現在は3DCADにも慣れ、作りたい部品を作ることができるようになり、ほとんど毎日、3DCADと3Dプリンターを使って様々な部品を作っています。
 3Dプリントしたロボットハンドのパーツ
3Dプリントしたロボットハンドのパーツ
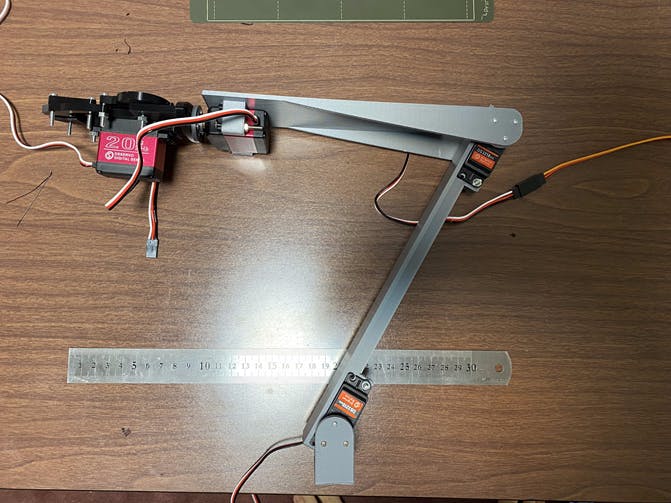 ロボットハンドのプロトタイプ
ロボットハンドのプロトタイプ
3Dプリンターで作成した部品とモータや電子部品等の既成品を組み合わせることも行っております。ロボットアームや移動システム、3Dプリンターを保温するための囲い(エンクロージャ)などを作りました。
3Dプリンターを保温するための囲い(エンクロージャ)
3Dプリンターは200℃以上の熱で樹脂を溶かして部品を作るため、室温が不安定な環境では部品の品質が下がってしまったり、通常は起きないエラーが発生してしまいます。また、室温を約40℃に保たないと印刷が難しい樹脂材料もあります。部品づくりを安定化させることの大切さは3Dプリンターの使用を通して痛いほど感じてきました。
そこで、部品づくりを安定化させるために、3Dプリンターの囲いを3DCADで設計し、3Dプリンターで部品を作成し、組み上げました。また、この囲いには火事を防ぐための煙センサや消火ボール、樹脂を溶かしたときに発生してしまう有害な微粒子をキャッチするフィルタ等も組み込むことができました。
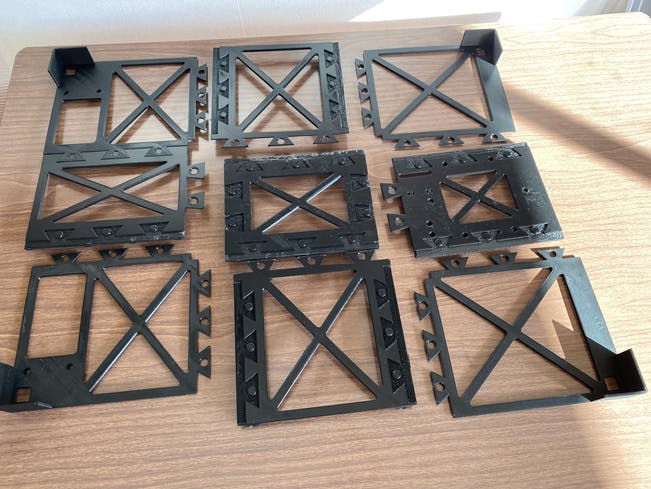
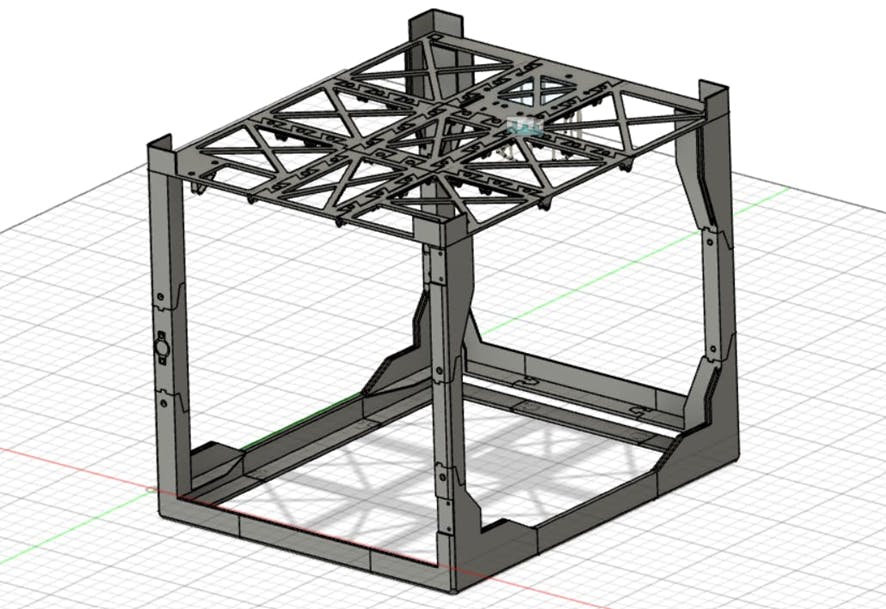 エンクロージャのモデルを3DCADで作成し、3Dプリントしました。
エンクロージャのモデルを3DCADで作成し、3Dプリントしました。
 印刷したフレーム
印刷したフレーム
 天井のパーツ
天井のパーツ
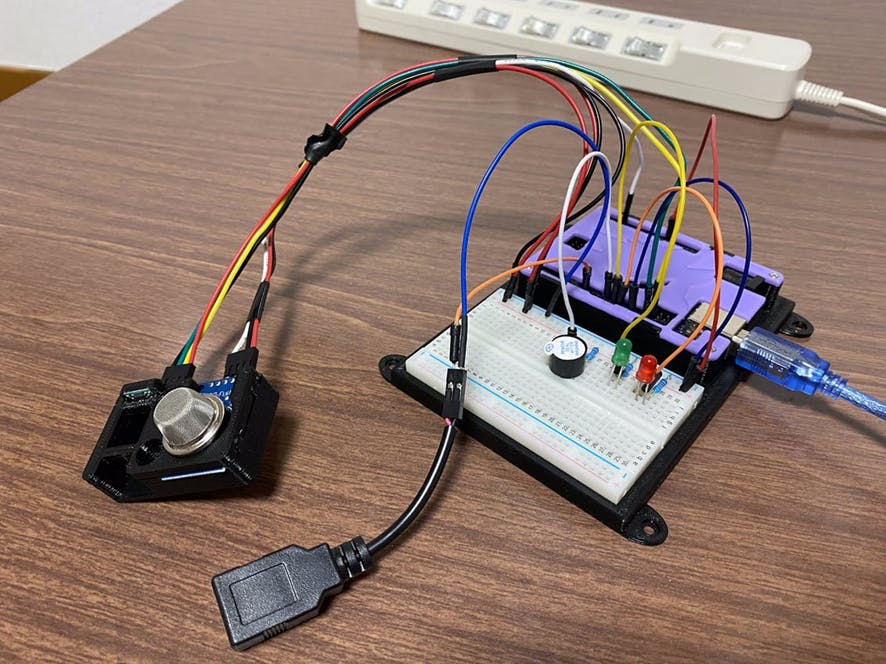 火事対策のための煙センサとスマート電源モジュール
火事対策のための煙センサとスマート電源モジュール
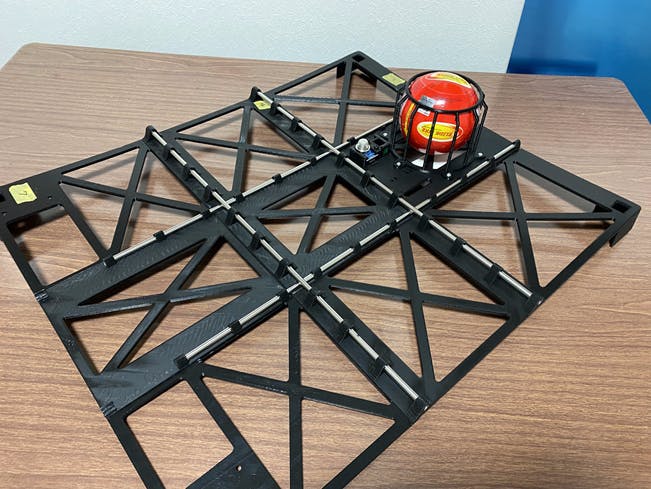 火事対策のための消火ボールを天井パーツに設置
火事対策のための消火ボールを天井パーツに設置
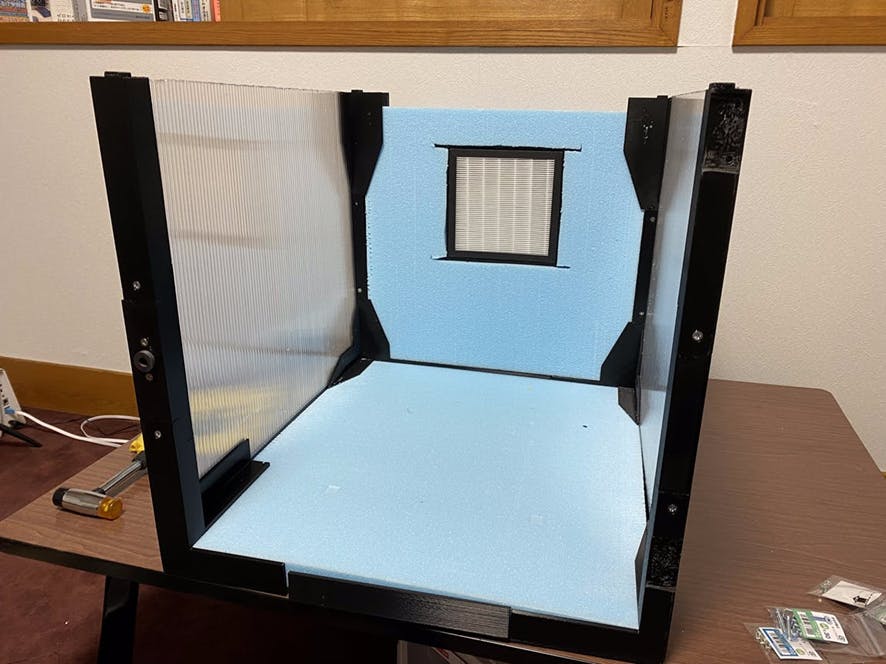 断熱材とポリカーボネイト板で保温性を高める
断熱材とポリカーボネイト板で保温性を高める
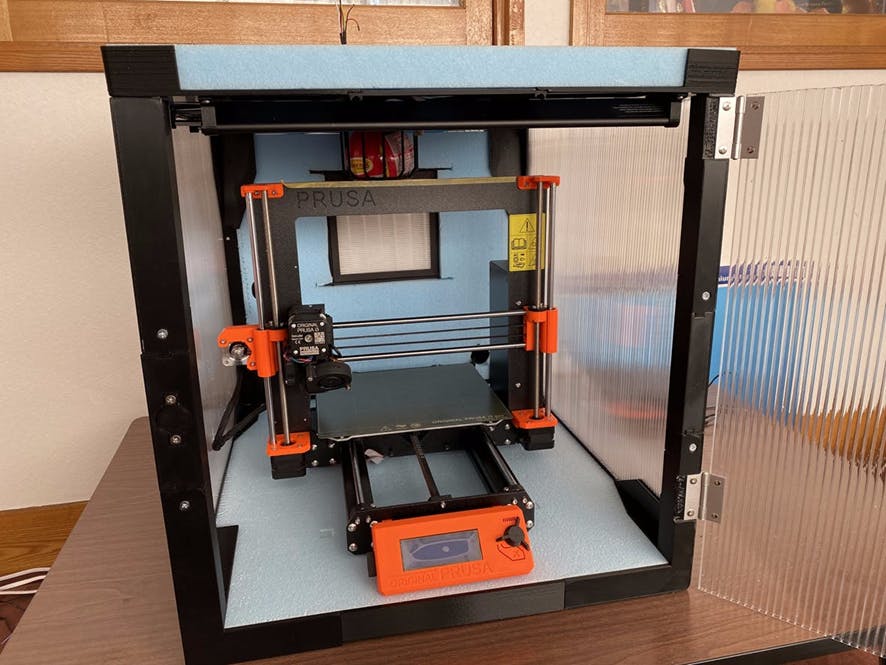 3Dプリンターを中に入れると、このようになります
3Dプリンターを中に入れると、このようになります
ロボット製作について
ロボット製作については、技術書で理論を勉強しながら、実際に3DCAD・3Dプリンタで部品を作り、開発を進めています。また、ロボットを動かすためのモータやバッテリー、配線についての知識や経験も増やすことができました。設計書の書き方についても学んでいます。
 ロボットハンドと移動システムの設計のための技術書
ロボットハンドと移動システムの設計のための技術書
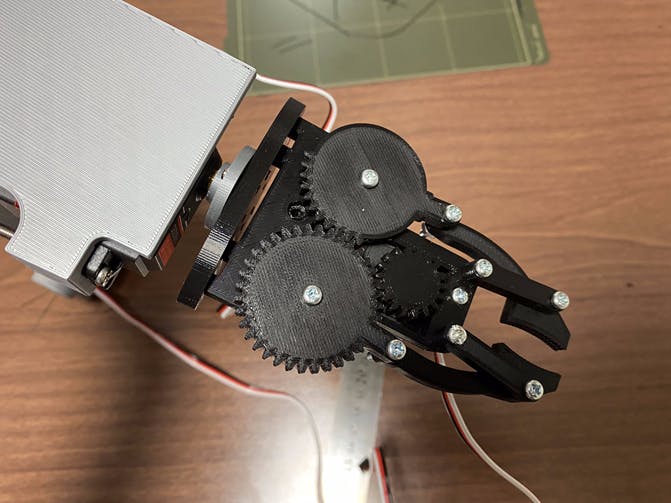
 ロボットハンドのプロトタイプ2
ロボットハンドのプロトタイプ2
対象作物の栽培
農作業ロボットで対象にしている葉ネギ、オクラについても実際に栽培することができ、ロボットで収穫を行うことを想定することができました。
特にオクラの場合には、品種によっても茎丈が伸びる速度に違いがあり、品目だけでなく品種に関しても選定を行う必要があることがわかりました。
 赤オクラは茎丈の成長が早く、最盛期には2m以上にもなる
赤オクラは茎丈の成長が早く、最盛期には2m以上にもなる
ホームページの作成
プロジェクト内容や活動報告、ご支援者の方々のお名前をホームページにて掲載させていただいております。

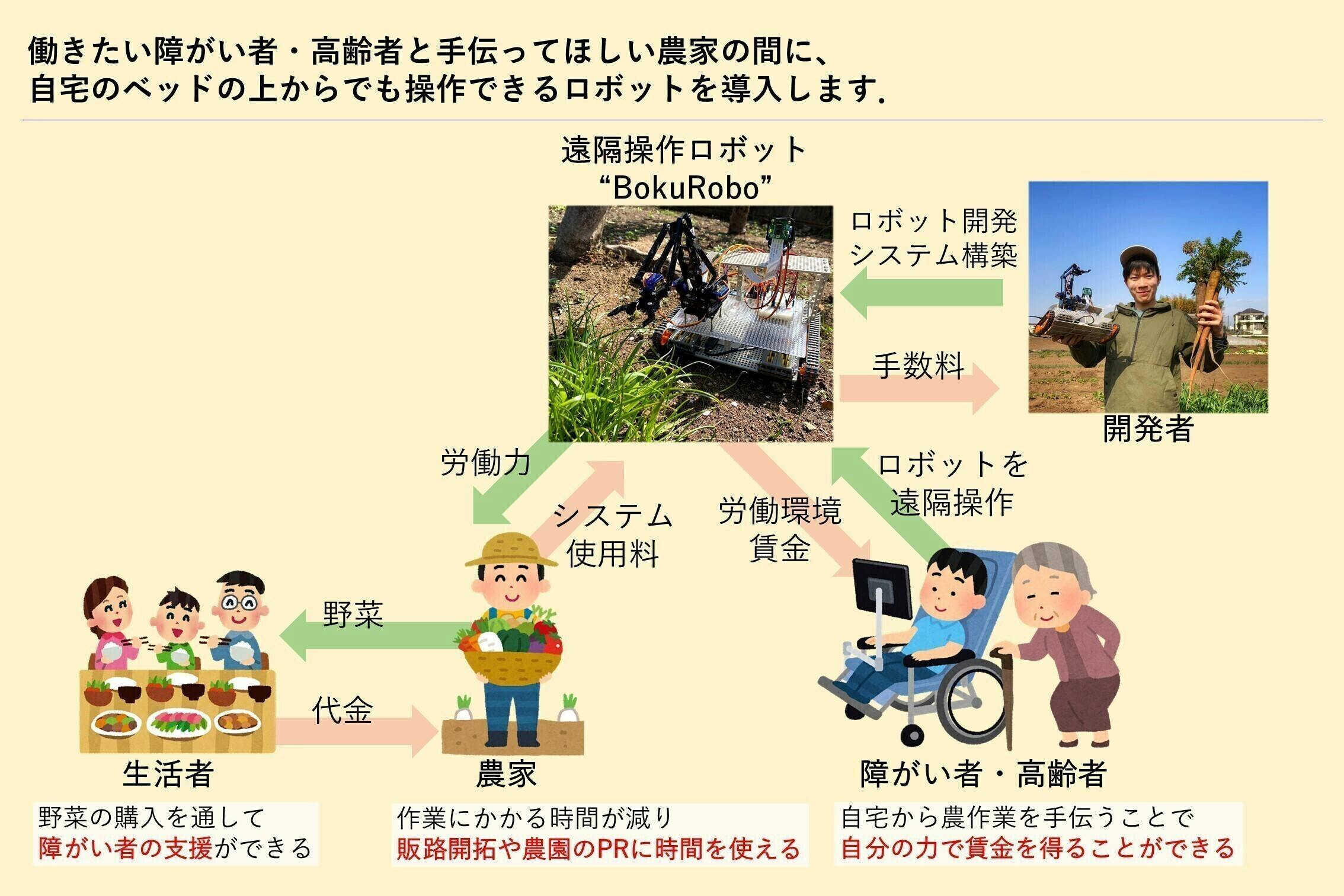
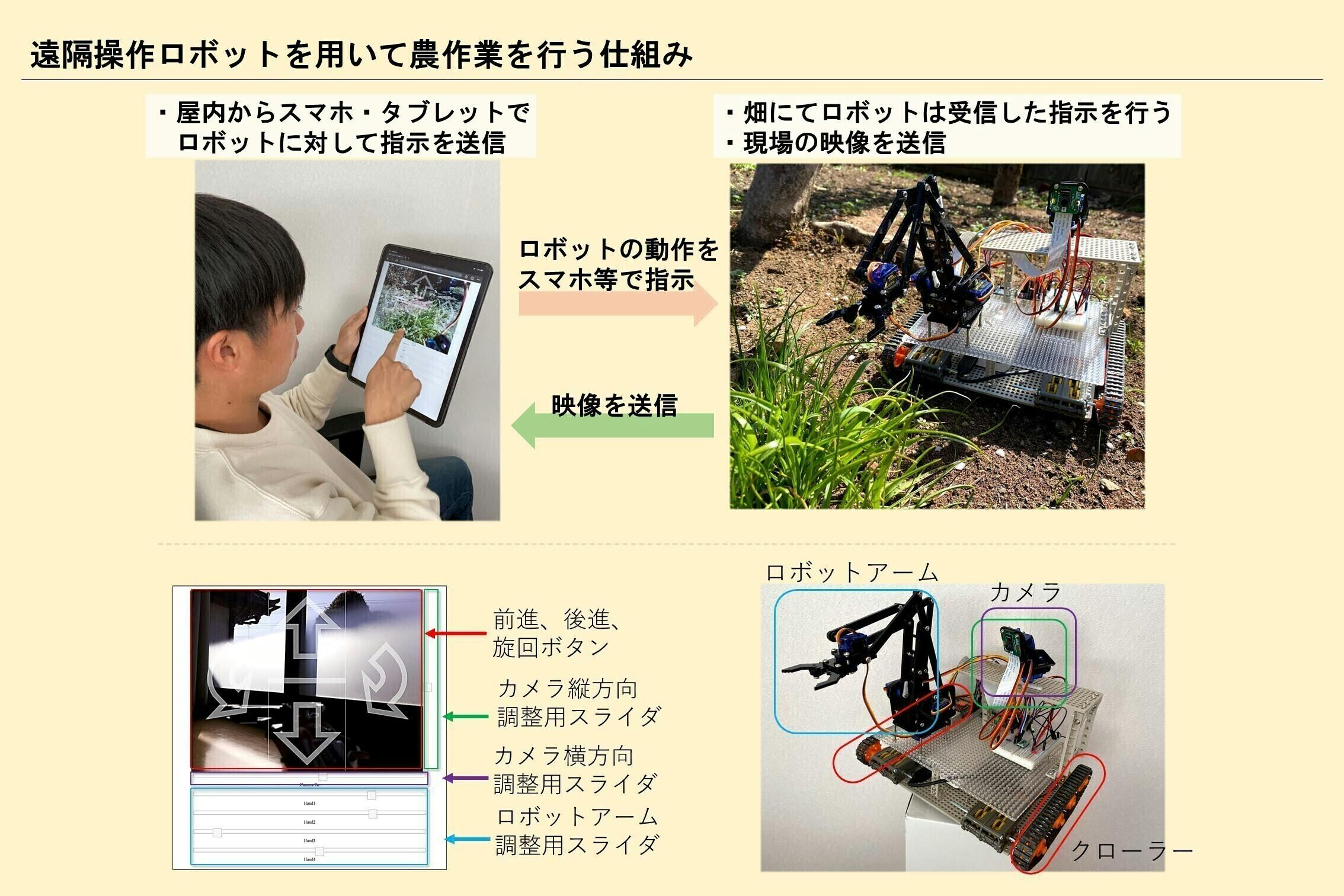
ロボットを操作する方法の開発
現状は同wi-fi内でのスマホのタッチ操作、PCのマウス操作にのみ対応していますが、今後はより直感的な操作方法を実装したいと考えています。
また、4G回線を使用した通信にも挑戦したいと考えています。
ロボット機体の開発
作物の品質を落とさずに収穫が可能なロボットハンドの設計や、畑の凸凹のある路面でも操作者が酔いにくい移動機構の開発、状況を理解しやすいカメラ位置の選定などを行っていきたいと考えています。
対象の作物であるハーブの栽培
ロボットの収穫の対象としているローズマリーとレモンバーナムを育て、ロボットでの収穫の実験をしていきたいと考えています。

・母校・東京高専で遠隔農作業ロボットプロジェクトについてのプレゼンテーション

・JCOMテレビにて紹介
YouTube
トーク配信
ウェブ記事
「障害と福祉と仕事」いろんなありかたに出会うWEBマガジンfindgood

プロジェクト成功までの道のりには、まだまだたくさんの課題がありますが、
一歩ずつ精一杯進めていきたいと思います。
2021年はたくさんの応援をどうもありがとうございました。
2022年も応援をどうぞよろしくお願いいたします。
よいお年を。
