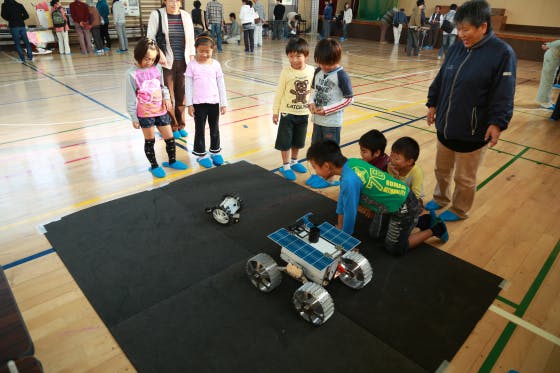
伊豆大島、北の山公民館でのローバー一般公開は大盛況のうちに終了!
今回の実験に参加していた、
様々な団体の無人探査車や無人飛行機が一同に集結した、
公民館の体育館はちょっとすごい光景でした。
我々のローバーたちも島の子...
伊豆大島での実験を昨日で完了しました。
準備から考えると
かなりの期間、フルスロットルで活動してきたのでもうヘトヘトです。。
でも、実験は終わった後が大事です。
得られたデータをプロトタイプモデルの設計に反映させるため...
今日から、代表の袴田、技術の伊藤、中川と金田で
伊豆大島に、実験に来ております。
持ち込んだローバー2機も順調に動作しており、
素晴らしい実験データを持ち帰れそうです。
と、まじめに実験に没頭していると思いきや?
本日は...
走行実験用の新しいローバーコンセプトモデルが完成しました!
コンセプトモデルとはプロトタイプモデルを開発する前に
様々なアイデアを試すためのモデルになります。
今回開発したコンセプトモデルは、プロトタイプの走行性能を極限...
前回は伊豆大島での不整地走行実験の準備を紹介しました。
今回はもう一つの実験、
“ローバーカメラからの間接視認による障害物識別実験”
の準備を紹介します。
まずこの実験がなぜ必要になるか?ですが、
私たちの作ったローバー...