



はじめに・ご挨拶
こんにちは!
私たちは、モデルロケットの開発をするために2019年5月にスタートした「TEAM TACHIBANA」です!
「チームで何かを作りたい」「やるならスケールの大きいことがしたい」という思いを持った仲間が集まり、ロケットづくりが始まりました。
そして、「学生が飛ばすロケットで地球の丸さを観る」ことが夢だと語る橘先生の応援があり、「TEAM TACHIBANA」が結成しました。
メンバーは全員、船橋情報ビジネス専門学校に通っている学生5人(写真撮影時1人不在)と、全力応援の橘先生(右上)の6人です。
学業や仕事の合間に時間を見つけ、全員で少しづつ着々とロケット開発を進めております!
このプロジェクトで実現したいこと
GPSや加速度センサなどを利用して目的地までのコースを計算し、パラシュートを制御する装置の開発を実現したいです。自分たちで設計、製作したモデルロケットにこの制御装置を搭載し、地上に降りてくる際に、打ち上げ地点や指定した地点に自動で向かっていくモデルロケットの開発を目指しています。
その開発費の一部をご支援いただきたく、初めてクラウドファンディングを行わせていただきます。よろしくお願いします!
プロジェクトをやろうと思った理由
パラシュートを利用して地上へと降りてくるモデルロケットですが、風に流されるなどして遠くへ飛ばされ、回収が困難になるケースが多くあります。そこで私たちは、ロケット自身が打ち上げたところに戻ってくることができれば、回収がスムーズに行われると考えたことで、このプロジェクトがスタートしました。同時に、このロケットを一から私たちの手で作り上げることに憧れと夢を抱きました。

これまでの活動
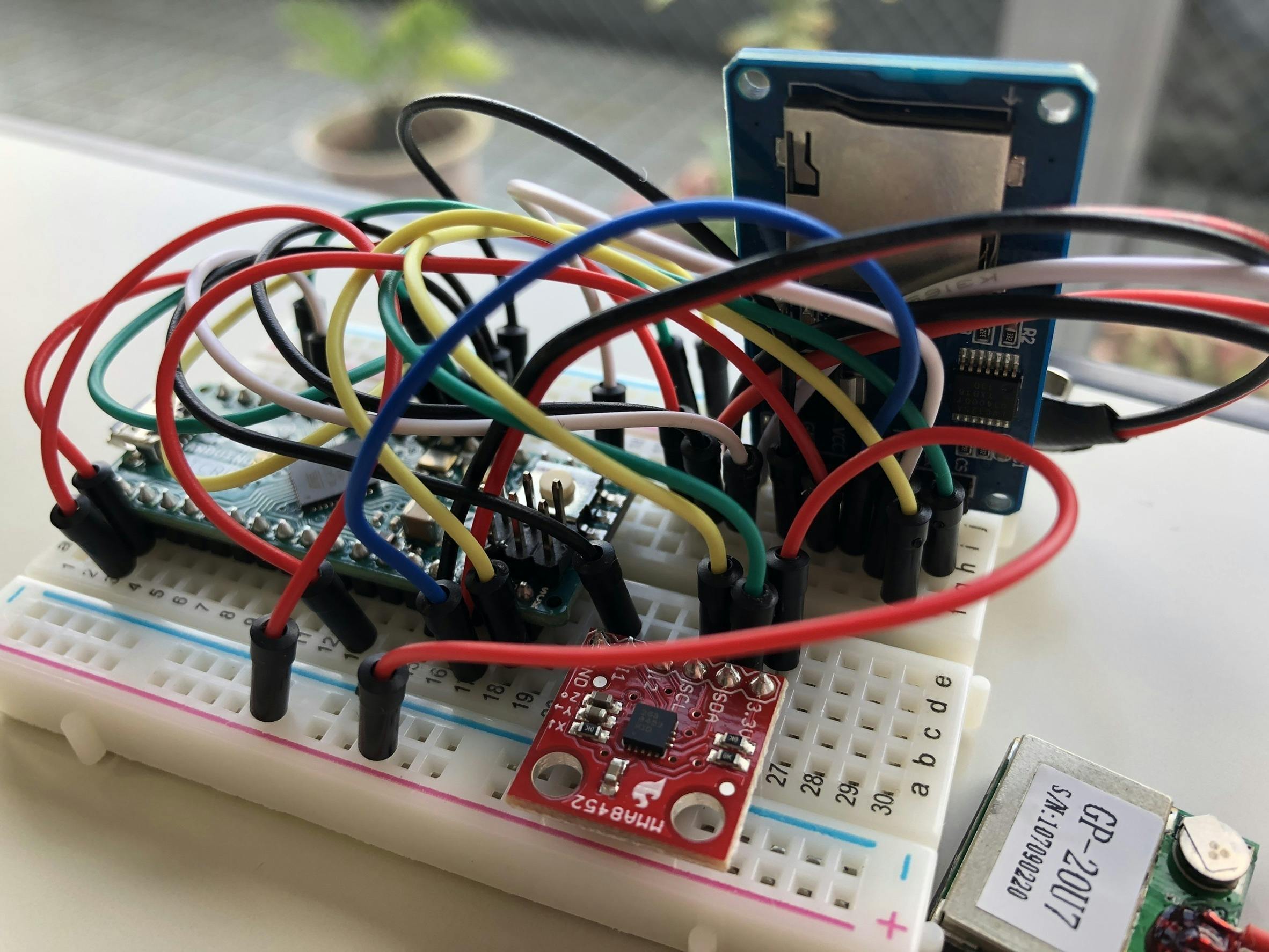
これまで、モデルロケット制作のノウハウを蓄積するために、現時点で試作機2機の制作と3度の打ち上げ実験を行いました。また、モデルロケットの飛行経路と加速度を情報収集するためのモジュール開発も同時に進めております。

<試作1号機制作>
試作1号機は、モデルロケットの作り方から打ち上げまでを、実践するという目的で制作を行いました。
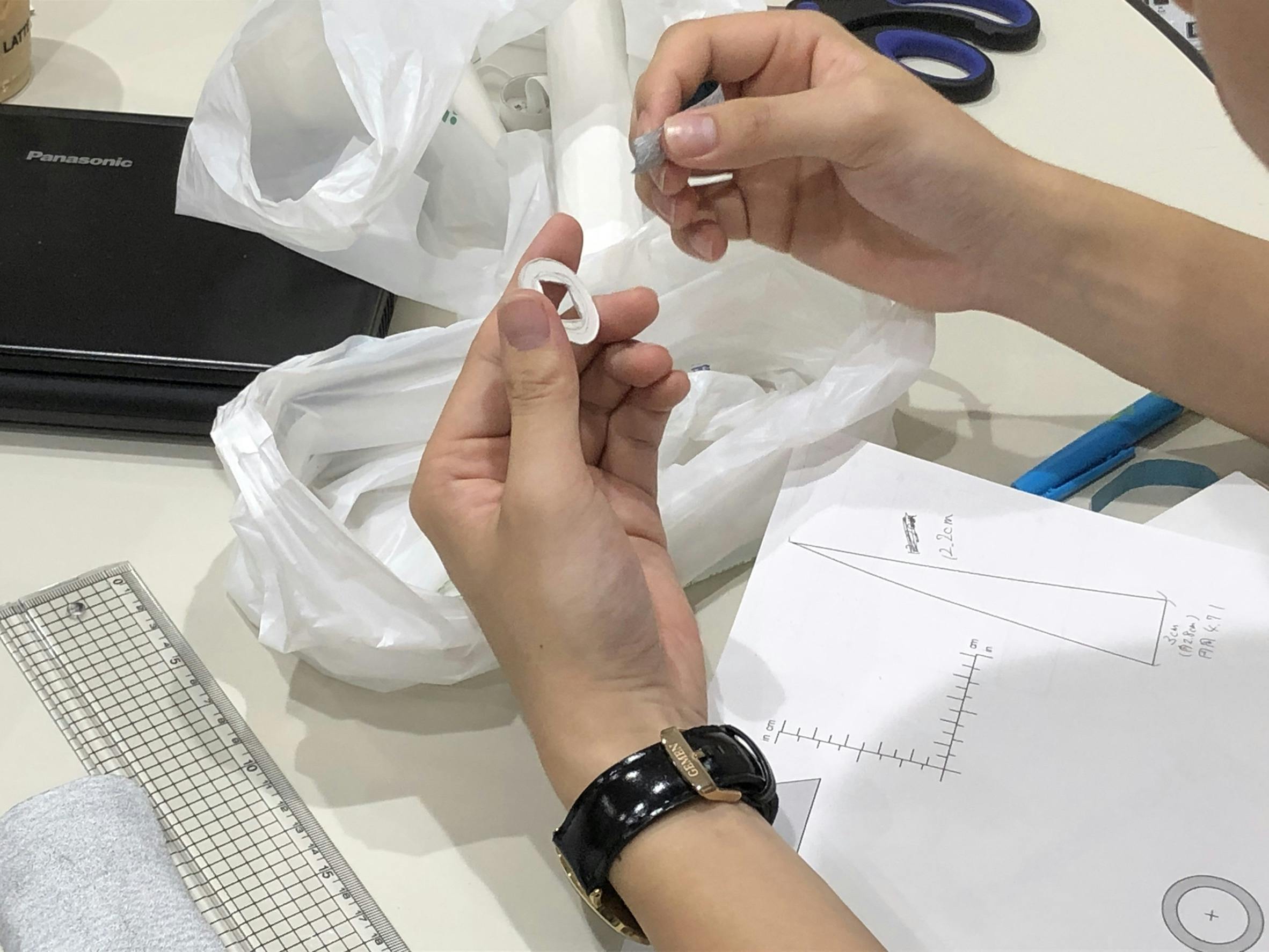
部品製作の様子。設計書をもとに細かな作業を行っています。
<試作1号機打ち上げ実験>
試作一号機打ち上げの様子。
発射されたロケットはシュミレーション通りに高度約100mまで上昇しパラシュートの展開も成功しました。
しかしパラシュート展開後、地上に降りてくる時に、木に引っかかってしまい回収に苦労しました。

<試作2号機制作>
試作2号機は、パラシュートを開くためのエンジンの逆噴射が、制御装置に当たってしまわないような工夫をしたロケットを制作することを目的とし、制作を開始しました。
<試作2号機打ち上げ実験>
 試作2号機においても、シュミレーション通りの高度まで上昇、パラシュートの展開にも成功しました。制御装置を搭載することを想定した荷室には、逆噴射の影響はなかったので、2号機の制作目的も達成しました。しかし、上昇時の軌道が若干不安定な瞬間も見受けられ、改善の必要性を感じました。また、試作1号機の打ち上げもこの機会に行い、成功しました。
試作2号機においても、シュミレーション通りの高度まで上昇、パラシュートの展開にも成功しました。制御装置を搭載することを想定した荷室には、逆噴射の影響はなかったので、2号機の制作目的も達成しました。しかし、上昇時の軌道が若干不安定な瞬間も見受けられ、改善の必要性を感じました。また、試作1号機の打ち上げもこの機会に行い、成功しました。

資金の使い道
集まった資金はすべて、モデルロケットの材料費と、GPSモジュールや加速度センサーなどの機器の購入費に充てさせていただきます。プロジェクト成功に欠かせないパラシュートの制御は、パラシュートに取り付けた舵取り用の紐を引っ張ることにより実現しようと考えています。プロジェクトの初期には、この紐を引っ張るためにモータを使用する案もありましたが、搭載できる限界重量を大きく超えてしまうため、電気を流すと縮む筋肉のような素材(バイオメタル)の使用を検討しております。この素材が20cmのもので
13,000円と、とても高価なためプロジェクト進行の大きな障害となっております。
これまでのお金の使い道
GPSモジュール ¥ 2,312
ナイロン生地 ¥ 990
ボール紙 ¥ 1,380
エンジンC6-3 ¥ 3,200
エンジンA8-3 ¥ 2,436
文房具等 ¥ 1314
電気点火装置 ¥ 4,000
加速度センサ ¥ 1,311
マイコン(Arduino micro) ¥ 2,800
6P乾電池 ¥ 1,324
microSDアダプタ ¥ 566
バッテリースナップ ¥ 226
合計 ¥ 22,759
これからの支出予想
プロジェクトの中で、試作品の製作と打ち上げ実験を繰り返していくことが予想されます。そのため本体の素材のボール紙や、パラシュートの素材であるナイロン生地はこれから先も購入が予想されています。また、動力であるエンジンは使い捨てなので、打ち上げ一回につき1つは消費します。そして、上記でも触れたバイオメタルは、機体一つにつき2個は最低必要であると想定しております。今後実験の結果を踏まえてさらにバイオメタルを増やすことも考えられます。
これらのことを考慮すると、プロジェクト終了までに、さらに3万円~5万円は必要になってきます。
皆様からご支援いただいた資金の使い道は、定期的にご報告させていただきます。
リターンについて
このロケットには、加速度やフライトコースなどの情報を取得し保存する、フライトロガーの搭載を検討しております。支援いただいた方には、ログに記載されたデータをもとに資料を作り、お送りしたいと思います。また、打ち上げ時の様子を撮影した動画もお送りいたします。

リターンのお渡し時期は2021年2月を見込んでおります。
詳しくは、次のプロジェクトの実施スケジュールをご覧ください。
実施スケジュール
2019年
6月 試作一号機制作
7月上旬 試作1号機打ち上げ 試作2号機製作開始
7月下旬 試作2号機打ち上げ フライトロガー製作
8月 フライトロガーを搭載したモデルロケットを打ち上げ、テストデータ収集
9月~12月 一方向に進むパラシュートの開発
2020年
1月~4月 パラシュート制御装置開発
5月~9月 パラシュート制御装置を搭載したロケットの開発 打ち上げ実験
10月 完成予定
11月~12月 高高度打ち上げへ挑戦
2021年
1月~2月 リターンのためのデータ整理 動画編集
最後に
自分たちで作ったロケットが天高く舞い上がった後、自分たちのもとへ帰ってくることを想像するとわくわくしませんか?このプロジェクトを成功させるために、毎日少しずつロケットの設計や開発を続けていきます!

本プロジェクトはAll-in方式で実施します。目標金額に満たない場合も、計画を実行し、リターンをお届けします。
掲載した写真はすべて、プロジェクトメンバーが撮影したもので、権利は各撮影者にあります。
また、掲載に際して各撮影者に掲載許可を取っています。







コメント
もっと見る