<iframe width="560" height="420" src="http://www.youtube.com/embed/SNYKStg3N0s" frameborder="0" allowfullscreen></iframe>
壁を走るロボットの技術を応用して、ホワイトボードの線を消して回るロボットを作ってみました。今回のプロジェクトで開発するうおーるぼっとでもホワイトボードイレイサーを取り付ければ同じことが可能です。
Rev.1から壁走行時のバランスを改善したのがRev.2です。Rev.1では、前方に重心が集中していたため、地面と水平に走行すると段々下がっていってしまうので、Rev.2では重心が中心になるように調整しました。
Rev.2はMakeT...
<iframe width="560" height="420" src="http://www.youtube.com/embed/1FDBYwRouxE" frameborder="0" allowfullscreen></iframe>
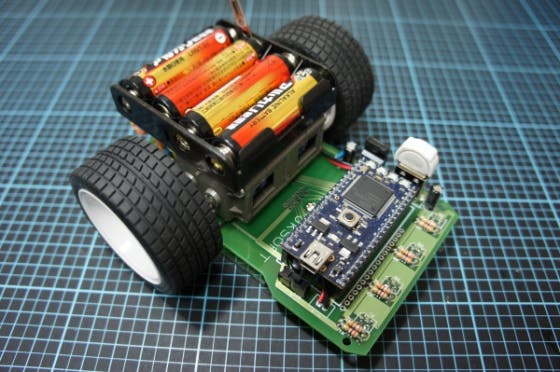
キット化をイメージして、作った最初の試作です。基板をフレームにして、機械的な部品数を減らして作りやすく設計しました。
<iframe width="560" height="420" src="http://www.youtube.com/embed/n2-s-t0L9Ko" frameborder="0" allowfullscreen></iframe>
mbedというマイコンボードを使って、スタンドアローンでWiiリモコンとBluetooth通信してコントロール出来る様にしたのがプロトタイプ3号です。センサーを使ったゲームモードや自立的に走るモードも作ってみました。これはニュースサイ...
<iframe width="560" height="410" src="http://www.youtube.com/embed/r1wa3WF1U5I" frameborder="0" allowfullscreen></iframe>
プロトタイプ1号は自動的に走るだけでしたが、このプロトタイプ2号はWiiリモコンで遠隔操作出来る様にしました。
使ったマイコンはフィジカルコンピューティングで有名なArduino。
WiiリモコンはパソコンとBluetoothで通信し...