
 LINEで送る
LINEで送るご挨拶
初めまして、私は「Noa.h」というチームのキャプテンを務める丸岡です。
この度、RoboCup 2026 仁川のJunior Soccer Visionリーグにおいて、日本代表として出場することとなりました。世界大会出場には多くの費用がかかります。渡航費・宿泊費・ロボットのメンテナンス費用など、これらを賄うためにクラウドファンディングを始める運びとなりました。
RoboCupとは
私たちは、これまでRoboCup Juniorという19歳以下の学生による自律制御ロボットの大会でロボットサッカー競技を行ってきました。
このロボットは人がコントローラーなどで操作するのではなく、事前に学生が用意したプログラムをもとに、センサーやカメラからの情報をロボット自身が判断して動きます。また、ロボットの機体は既製品などではなく、学生自身が設計・製作を行います。
Noa.hのこれまで
私たちのメンバーのうち3人は2024年大会からRoboCupの活動を開始し、2025年大会から現在の4人のメンバーによって構成されたチームである「Noa.h」として出場しています。
私たちは2024年度、25年度の全国大会における総合2位の成績、および2024年度はオランダで開催されたRoboCup 2024 Eindhovenへの出場といった実績を持ち、この3月に行われた2026年度の全国大会においてついに念願の優勝を果たしました。
また、私たちはRoboCupの活動を通して開発した技術、具体的には「機械学習を用いた単眼カメラによる物体間距離推定」という研究内容を国際学会であるMOC(微小光学国際会議)2025のポスターセッションで発表し、「Excellent Poster Award」を受賞をしました。また、「生成AIなんでも展示会」というイベントにおいて、AIとのチャットを通して私たちのロボットを制御する体験を展示するなどの様々な活動を行っています。


Noa.hの技術紹介
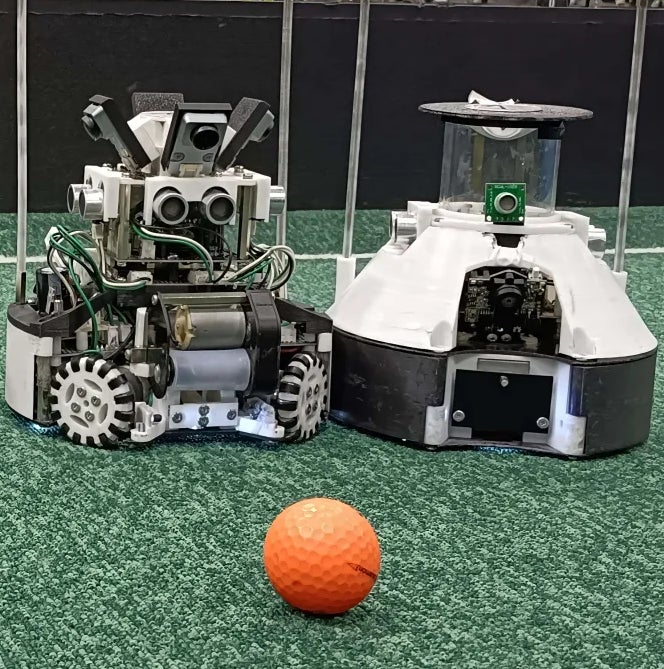
私たちのロボットに採用されている特徴的な機能を紹介します。
私たちのロボットの一台には4方向直視カメラが搭載されています。双曲面ミラーによる全方位カメラを搭載したロボットと比較してより鮮明かつ遠くのボールを捉えることができます。
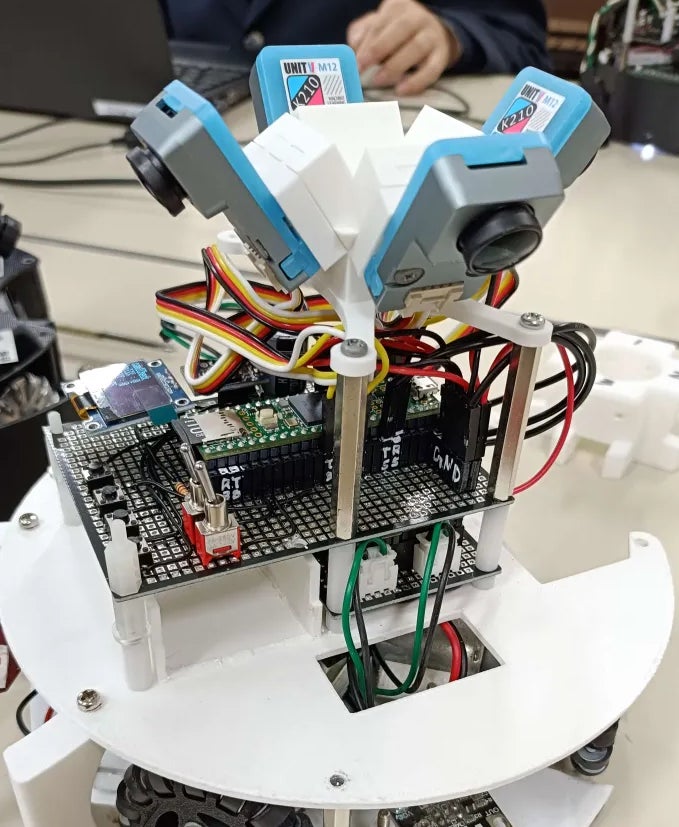
ロボットから直視カメラで捉えたボールやゴールまの距離推定には機械学習の技術を採用しています。ロボットのマイコン(コンピュータ)という限られた計算能力の中で高速な距離推定を実現するため、多項式回帰という軽量な手法を採用しています。この多項式回帰モデルの学習にあたっては、精度向上のため蒸留手法を採用しています。この手法は、学習のために収集したデータを一度ニューラルネットワークという高度なモデルとして学習した後、このニューラルネットワークモデルの出力を用いて多項式回帰モデルを学習するという手法です。この手法は収集データを直接学習した場合と比較して高い精度で距離推定を実現することができました。
ロボットサッカーの試合において、想定外のアクシデントはつきものです。試合コートの条件は会場や時間帯における日光条件によって様々です。このような状況の変化に素早く対応するため、私たちのロボットはPCなしで設定を細かく調整する機能を備えています。私たちのロボットはディスプレイとボタン、トグルスイッチを備えており、これらを使ってロボットのスピード、センサーの閾値、動作アルゴリズムの切り替えを行うことが可能です。設定した内容はマイクロSDカードに記録されるのでロボットの電源を切った場合でも設定が保持されます。この機能によってプログラムの書き換えなしに柔軟な調整を実現し、限られた準備時間の中で調整にかける時間を大幅に減らすことに成功しました。
なぜクラウドファンディングをするのか
世界大会に出場するためには、交通費・宿泊費・メンテナンス費用など、多くの費用が必要となります。私たちはこれまで高校の部活動として活動し全国大会に出場してきましたが、メンバー全員が高校を卒業したことで、今回は学校や所属団体からの補助を得るのが難しく、世界大会への出場費用をすべて自分たちで用意しなければならない状況にあります。また、私たちのロボットはメンバー自身が一から設計・製作したオリジナル機であるため、市販のロボットとは異なり、部品の調整や交換といった定期的なメンテナンスが欠かせません。さらに、世界の強豪と渡り合うためには現状のままでは不十分であり、全国大会でボール保持が安定せず本来の戦術を発揮しきれなかったドリブラー機構を根本から見直し、世界大会でより高いパフォーマンスを発揮できるよう改良に取り組んでいます。卒業後初めての世界挑戦となる私たちにとって、皆さまのご支援が世界の舞台に立つための大きな力となります。
どうぞよろしくお願いいたします。
大会情報
大会名:RoboCup 2026 Incheon(第30回 RoboCup世界大会)
開催期間:2026年7月1日(火)〜 7月5日(月)
会場:Songdo Convensia(ソンド・コンベンシア)/韓国・仁川(인천)
規模:世界各国から3,000名以上の競技者・研究者・学生が参加見込み、来場者15,000名超が予想される世界最大規模のロボット・AI競技会
参加部門:RoboCupJunior Soccer Vision リーグ(旧Soccer Open)
チーム構成
丸岡勇也 (芝浦工業大学システム理工学部情報課程ソフトウェアコース)

Noa.hのキャプテンとソフトウェアを担当しています。僕自身は小学校高学年の頃からRoboCupに憧れ、世界を目標に活動をしてきました。そうして掴んだ初めての世界大会では、日本大会と世界大会のコートの違いに対応しきれず、僕としては悔しい結果になってしまいました。そこから、チーム全体でオランダ大会での反省を踏まえたオムニホイールやカメラ機構の開発、さらにはより高度な制御を目指した機械学習の研究など、次の世界大会への機会に向けて取り組みを行ってきました。そして今、年齢的にこのメンバーで出場できる最後のシーズンに掴んだ世界大会をこれらの取り組みの集大成として、全力で戦い抜きたいと思います。
山本龍輝(神戸大学海洋政策科学部応用科学領域)
Noa.hのメカニック担当をしています。理想の機体のコンセプトを設計、製作して形にする。そして日々のメンテナンスを行うのが私の仕事です。ロボカップには高校1年で出会いました。そこから日々思い描いたものを形にする能力を伸ばしてきました。今回の韓国大会ではオランダ大会で発揮しきれなかった機体の性能を発揮させてみせます!
古市悠(芝浦工業大学システム理工学部情報課程ソフトウェアコース)

Noa.hのソフトウェア担当をしています。機体の持つ力を最大限引き出せるようなプログラムを構築する役目を担っています。最近では生成AIや機械学習の研究に取り組んでおり、新機体で使用している単眼カメラで距離推定を行うためのモデルの学習などを行いました。私はオランダの結果にはまだ満足していません。今度こそもっと上へ我々のロボット2機を導きたいと思います。
加治茜音(金沢美術工芸大学工芸学科)

ものづくりが好きで、メカニックを担当しています。また、デザイナーも担当しており、描いたイラストはチームのポスターや名刺に使っています。大会ではロボットの整備を頑張りたいです。
最後に
私たちは、ロボット競技への興味、憧れからRoboCupの活動を開始し、今は競技だけでなく、そこから発展して研究、展示など様々な活動を行っています。これらの活動の原点となるRoboCup活動の集大成として、私たちは世界大会を全力で戦い、さらに様々な国や地域のロボカッパーとの交流を行っていきたいと考えています。
私たちの活動に共感していただける方々からのご支援をいただけると幸いです。
応援よろしくお願いいたします。

リターンについて
大会参加レポート:大会に参加した記録(試合や行った技術交流など)の報告をお送りします。
機体のプログラム:我々の機体の制御で用いているプログラミングを送ります。距離推定の実装やこだわりが詰まっています。(言語はC++、Pythonです)
機体の3Dデータ:部分部分のパーツの3Dデータをお送りします。(stlかプロジェクトファイル(Autodesk)かになります)
単眼カメラによる機械学習を用いた距離推定の研究資料:MOC(微小光学国際会議)で優秀ポスター賞を獲得した、我々の機体に搭載している距離推定技術の研究資料(ポスター)です。
ノア(チームキャラ)のアクリルキーホルダー:我々のチームのキャラであるノアのアクキーです。大きさデザインなどは未定です。(こちらは郵送でのお送りになるので住所が必須です)
 ▲Noa.hのAIマネージャー,ノア
▲Noa.hのAIマネージャー,ノア
美大生による機体のデッサン:メンバーにはロボットチームには珍しい美大生がおります。ロボットのデッサンをした人も作品もそうないだろうということで返礼品に加えてあります。(こちらは郵送でのお送りになるので住所が必須です)






コメント
もっと見る