第3世代機(レイ)関連の最近の進捗を報告します。
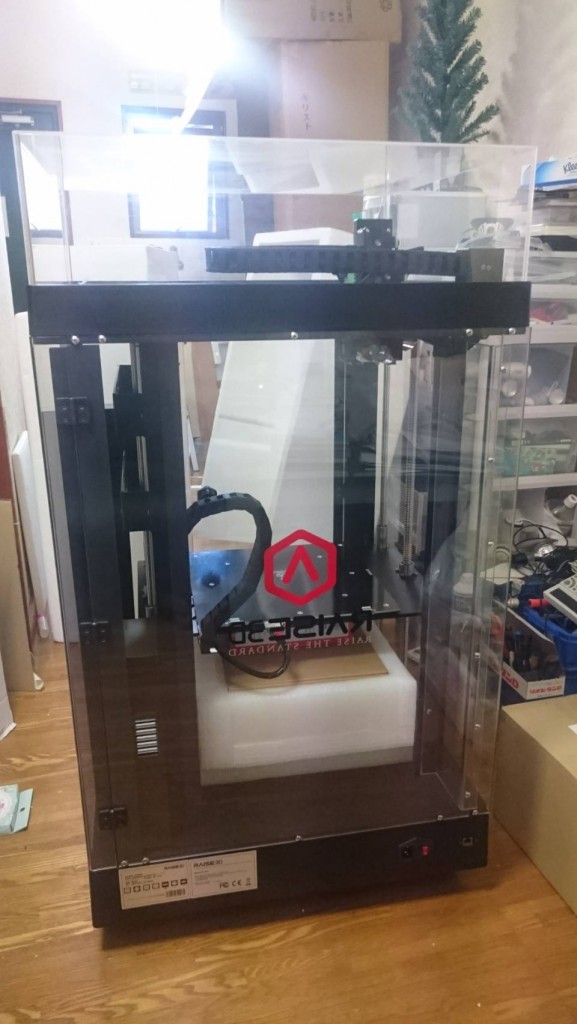
まず3Dプリンターを購入しました!RAISE3Dっていうやつで、お値段92万円ほどでした。
クラウドファンディングで集めた資金の4分の1ほどにもなる計算ですが、これが無いと胴体とかプリントできないので思い切って買いました!一応前プリントしていたのは大学の研究室のなので、自分でも揃えて本番用等はこれでプリントする予定です。胴体はプリントに1週間くらいかかりそうです。

結構大きいです。小さい冷蔵庫くらい。後輩に設置手伝ってもらいました。


大きくて重いのでいったんひっくり返してから立てることに

梱包用の発砲スチロール

こういう大きい段ポールみつけると入ってみたくなりますよね←
しばらく遊んでました
設置
カッコイイ!
肌色フィラメントも5㎏くらい買いました。今のところこのフィラメントを使っているのですが発色がすごく良いです。


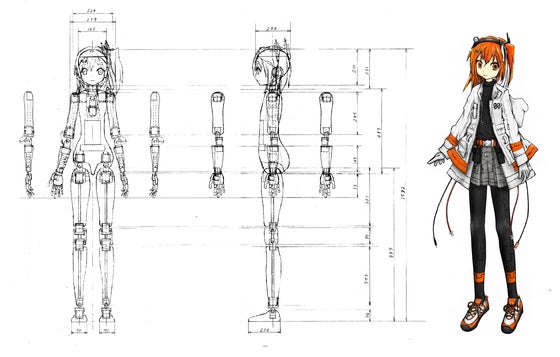
胴体部分のモデリングもだいぶ進んできたので、
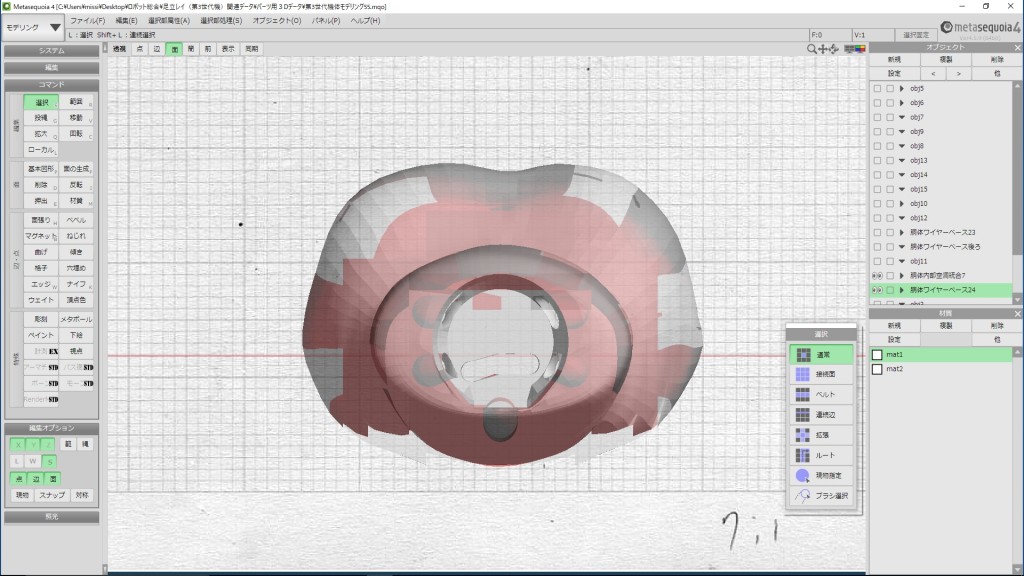
真上から。
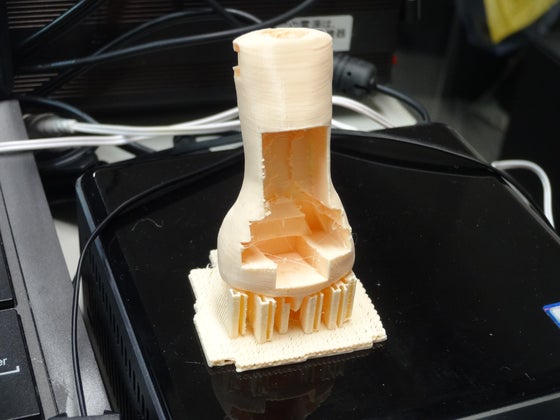
現状のものを10分の1サイズで出力してみました!下の黒いのはレイの頭部PC
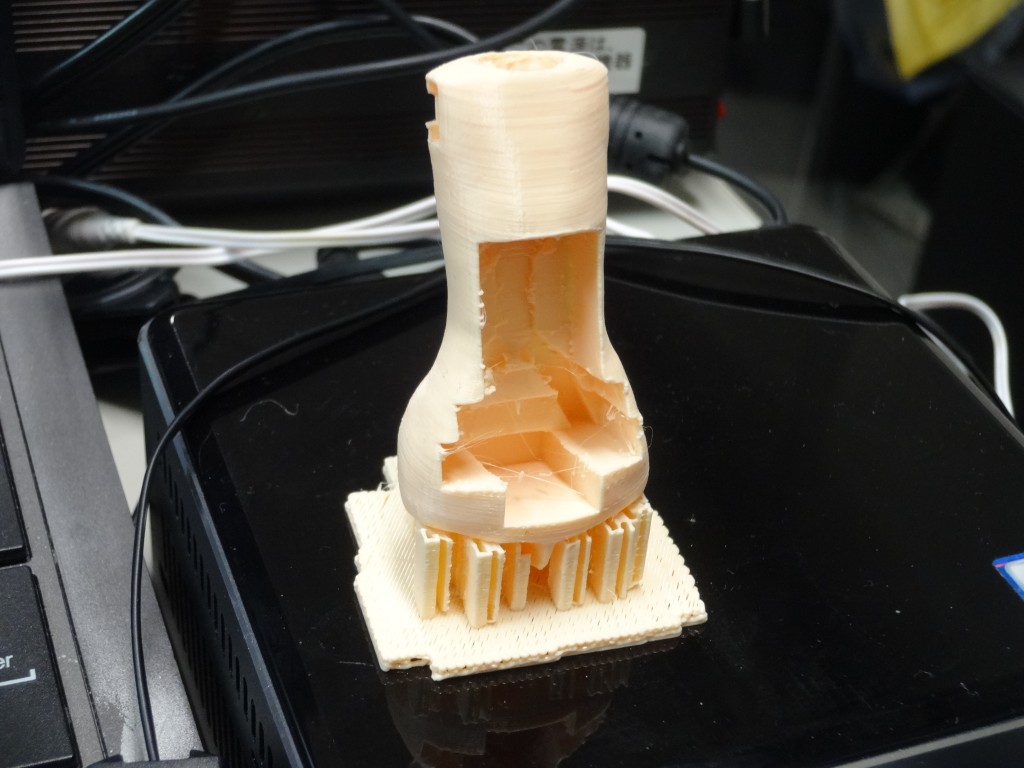
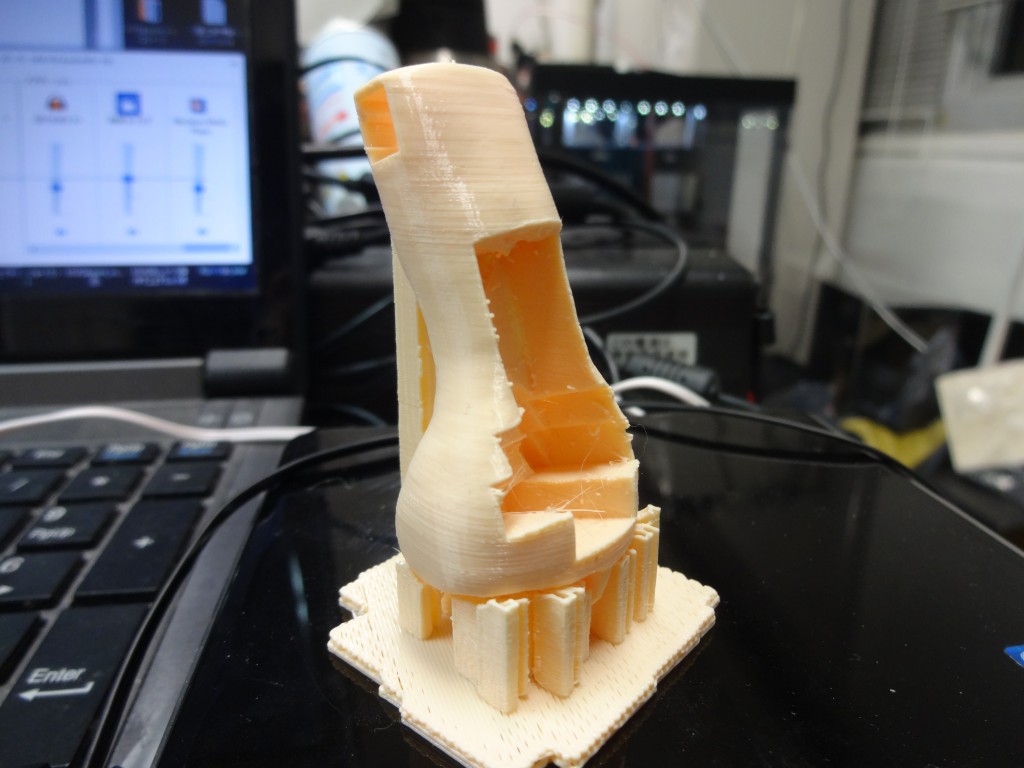
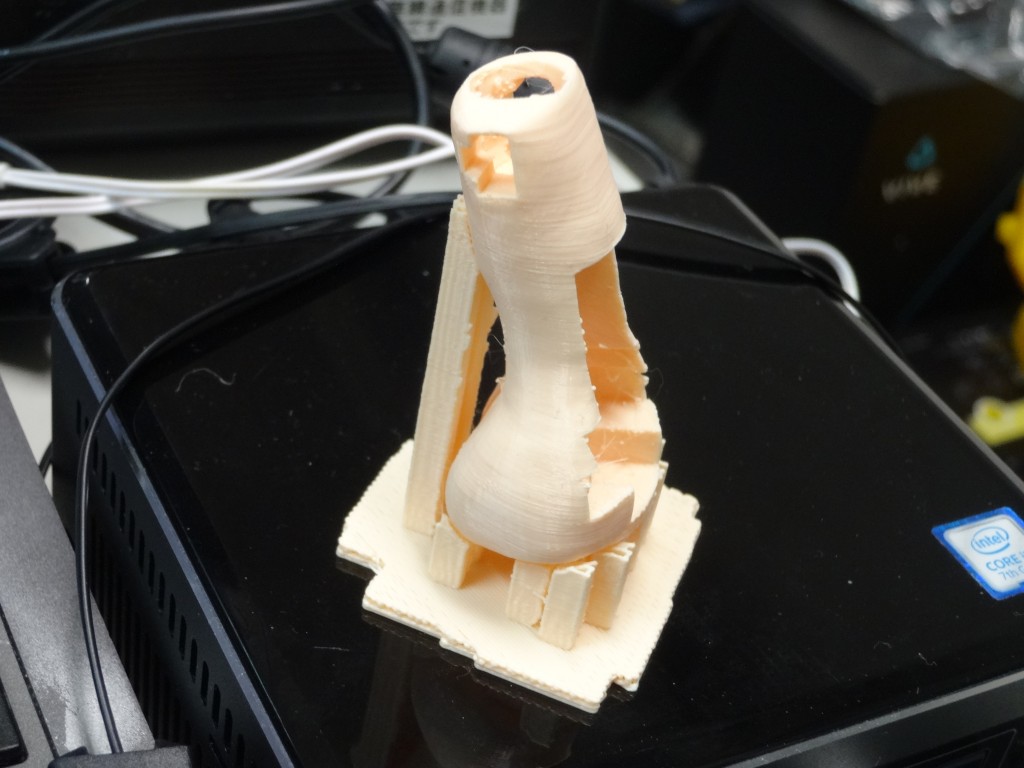
いい感じです。
さすがに小さすぎて粗いところも見えるので、今度は5分の1くらいで出力して出力方向なんかの検討もしようと思います。それと、接続方法としてインサートナットを使用する事を考えているのですが、そのねじ込み用の穴径や強度確保のための周りの積層厚さの調整も必要なのかなと思っています。全身出すと大変なことになるので、部分部分テストして全身出す時は半分本番のつもりで出したいところです。

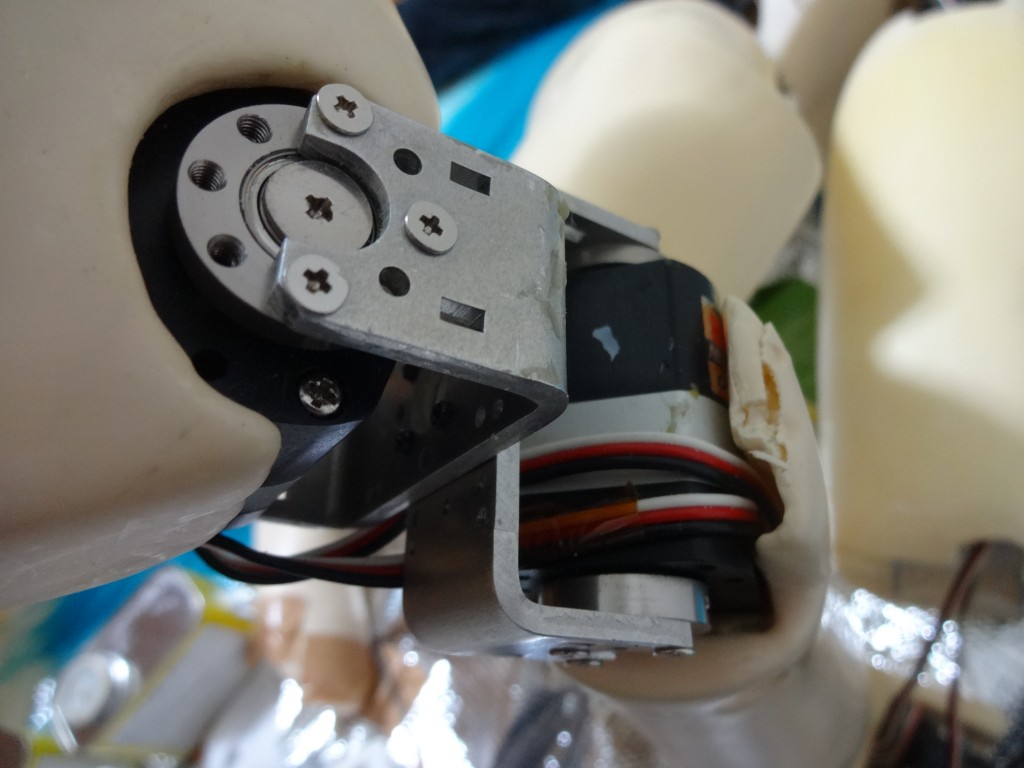
インサートナット
脚部のサーボ関連が開発途中なのでその部分が作りこめないのですが、そちらも徐々に進んでいます。
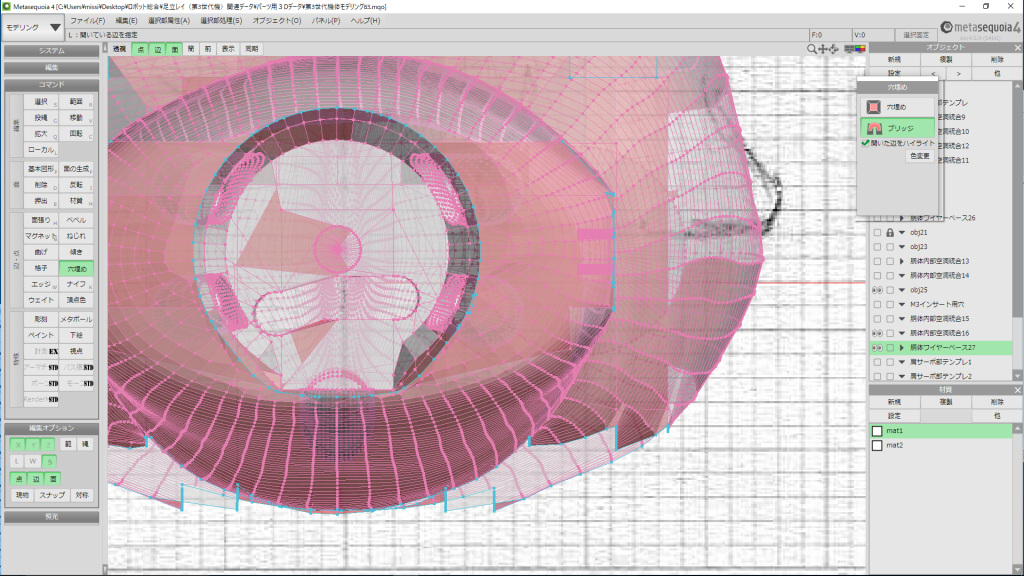
下は現状のモデルを全部表示して脚部アクチュエータを想定されるサイズで配置して収まるかなどを検討している図です。丸っこい円筒型のものが脚部アクチュエータの外径で、直径66㎜高さ66㎜の円筒型です。
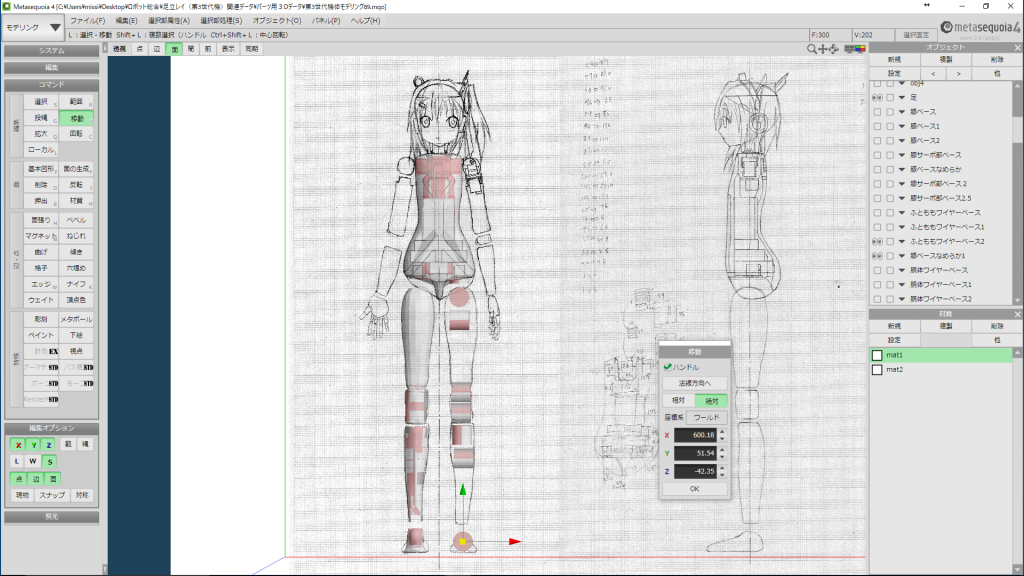
正面
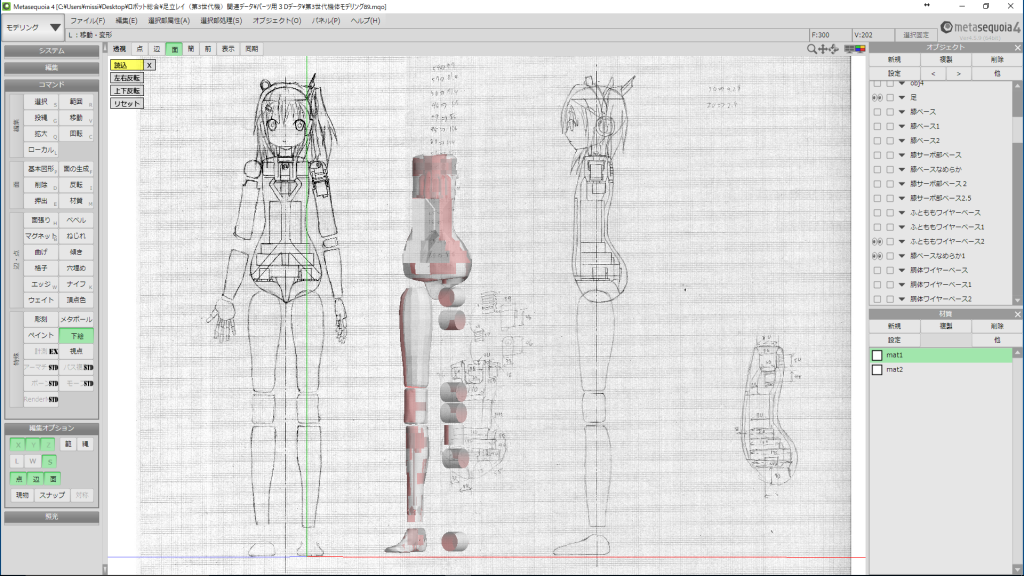
斜め
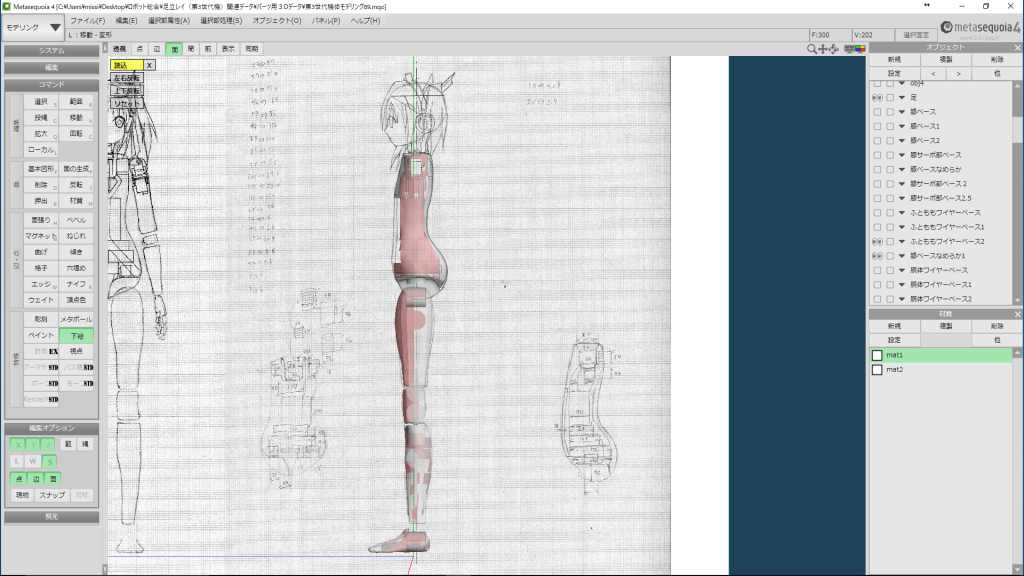
横
そしてこれがサーボに使用する予定のモーター、Maxonの60flat、出力100Wのものです。

計算上ですが、これで50倍減速するとストール時1400kgf・cmのトルクが出る事になります。軸先から1cmのところで1.4t釣りあげる力という事になります。今のミク2号機の近藤の6003が67kgf・cmなので約20倍の力です。
それで回転速度も同じくらい出ます。これ自体の重さも300gくらいありますが、これを足に16個つけたとしても充分おつりがくるほどのパワーを発揮してくれるはずです。
そしてこれはブラシレスモーターなので制御が難しいのですが・・隣の棟の研究室でこれとほぼ同じ型番のブラシレスモーターを宇宙エレベーターの昇降用ロボットの駆動用に使っててそれのすごくいいモータードライバを作ってる人がいると聞いて(実はこの前のミクの展示の時一緒に横で展示していたのでその時話して気づきました)早速協力をしてもらいに行きました!同級生でした!
これがその動作試験の様子です。
かなりいい感じに動いてます。ほとんどそのまま使えそうなレベルです。課題としてはこれをサーボモータの数(足で16個)だけそれぞれ積まないといけないので、サーボモータそのものに組み込めるように小型化することや、電圧等の仕様を詰めてよりシンプルなものにする事、通信規格の仕様、等です。この部分は減速機ともかかわってくるのですぐにはできないかもしれませんが、まずここまでしっかり動いたという事はかなり大きいです。ご協力大感謝です!やっぱり大学にいてよかった。
とりあえずレイ(のハード)関連はこんなところです。
以前ちょっとツイッターにうpしたモーションキャプチャシステムはまだ動画制作中ですすみません!2号機のアップデートとしては最大のものになると思います。







