

 LINEで送る
LINEで送るくはじめに・ご挨拶
はじめまして!

「未来をつくる人をつくる。」
をスローガンとし、次代のエンジニアを育成する東京都立産業技術高等専門学校に入学して4年、「災害時に役立つロボット」を作ることを目的とした研究室に所属しており、
予選を勝ち抜き、毎年行われる
「全国レスキューロボットコンテスト」に参加することを目標としメンバーと共に今まで活動してきました。

メンバー編成としては
4年生:4人(写真下側)
5年生:3人(写真上側)
の計7名で活動しています!
僕の研究室は先輩、後輩関係なくとにかく仲が良く製作段階でもとてもアイデアが沢山出ます!
これまでの活動
普段、放課後に研究室に集まりチームメンバーと共にロボットの製作•改良をしております!
こちらが研究室の様子です

ロボットを作る為に必要な材料をこちらの部屋で加工しています。
7月7日に各参加者がお互いの技術を高め合うためのレスキューロボットコンテスト関東予選に参加しました。
大会についてのより詳しい情報はこちらからご確認頂けます。
https://www.rescue-robot-contest.org/19th-contest/

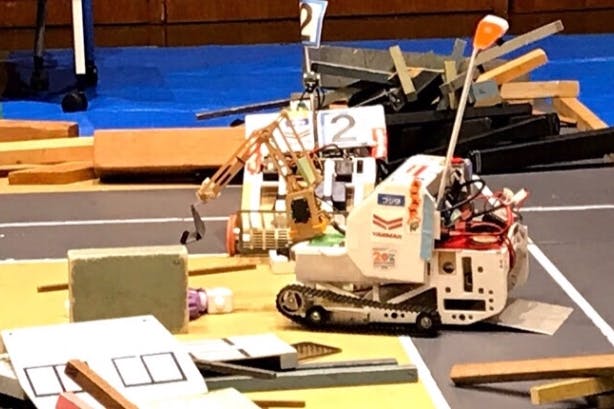
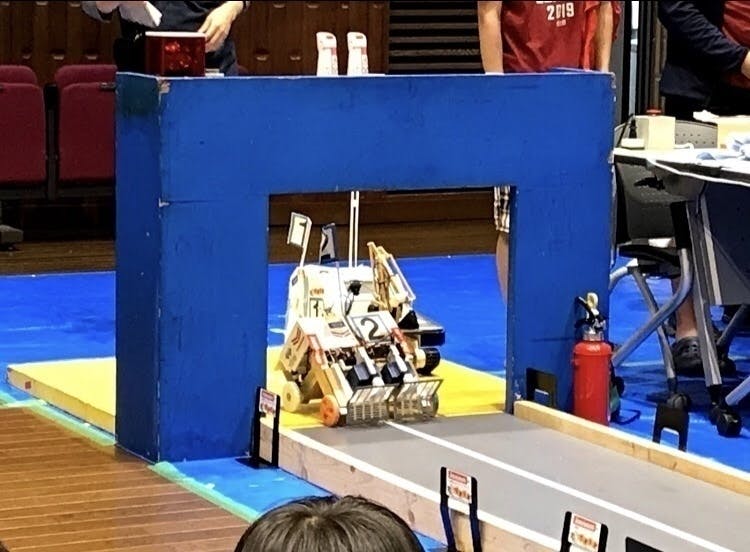
因みにこちらが私達のレスキューロボットが競技に参加している様子です!

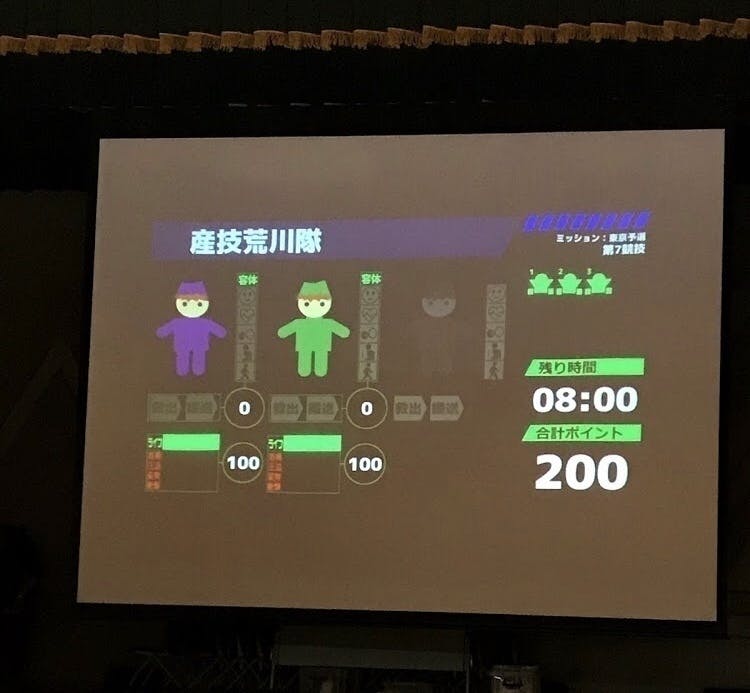
【競技内容について】
災害時を想定してがれきの下に埋まってしまっている人形(ダミヤン)をいかに優しく救出出来るかという競技です。 その人形にはいくつかのセンサが入っており、落としてしまったり力を加え過ぎてしまうなど、乱暴に救出するとセンサが反応し、減点されてしまうという仕組みになっています。↓

(大会の競技ルールについてのより詳細な情報はこちらからご確認頂けます。)
https://www.rescue-robot-contest.org/forTeam/19th-contest/bosyu/new-team
それを前提とし、予選を勝ち抜く為にどのようなロボットにすればダメージが少なく人形を救出できるのか、メンバーで話し合い試行錯誤してきました。長い間予選敗退が続いていた事もあり、今回本戦に出場できる事が決まり、現在は改良に力を入れています!

1号機と2号機の2種類があり
1号機→がれきを退かしダミヤンを救出。
2号機→救援物資を運ぶ。
という様に役割を分けています。
又、今年の大会ではでこぼこした床があり普通の車輪では走りづらいため1号機はベルトコンベアで走るようにしています!

プロジェクトをやろうと思った理由
お盆時期で割高になる宿泊費、ロボット等の運搬費、交通費などが捻出出来ないことが分かり、せっかくの機会ですが資金難の為参加を辞退しようかという話になりました。
しかし、全国大会に参加することでレスキューロボットという社会貢献活動につながる研究を更に深めたいとの意見から今回クラウドファンディングの力をお借りしたいと思いました。
資金の使い道
交通費:160000円(7名)
宿泊費:140000円(7名)
ロボット製作•改良•活動全般にかかる諸費用:50000円
リターンについて
【3000円】
•8/10〜8/11の大会の様子を写真、動画でお伝えします
•チームメンバーからのお手紙
【5000円】
•オリジナルアクセサリー1種類
•8/10〜8/11の大会の様子を写真、動画でお伝えします。
•チームメンバーからのお手紙
【10000円】
•オリジナルアクセサリー2種類
•8/10〜8/11の大会の様子を写真、動画で報告します。
•チームメンバーからのお手紙
【30000円】
•オリジナルアクセサリー2種類
•8/10〜8/11の大会の様子を写真、動画で報告します。
•オリジナルTシャツ
•チームメンバーからのお手紙
実施スケジュール
8月9日夕方 東京駅出発
8月9日夜中 三宮駅到着
8月10日朝 受付•競技開始
8月11日夜 閉会•帰宅
最後に
レスキューロボットコンテスト全国大会開催まで時間が残りわずかではありますが、どうか皆様のご協力よろしくお願い致します!
費用の関係であまり立派なリターンをお届けすることはできませんが、少しでも皆様に感謝の気持ちを伝えれる様、
一つ一つ気持ちを込めて制作します!
本プロジェクトはAll-in方式で実施します目標金額に満たない場合も、計画を実行し、リターンをお届けします。
目標金額を超えた場合リターン内容変更、来年度の活動費用に使用します。
最新の活動報告
もっと見る
【活動報告】レスキューロボットコンテスト2日目
2019/08/12 01:16こちらの活動報告は支援者限定の公開です。【活動報告】レスキューロボットコンテスト1日目
2019/08/11 00:20こちらの活動報告は支援者限定の公開です。作業進捗状況報告
2019/07/25 14:02以前関東予選に、参加した際はこの様に前に向けて固定しているカメラだった為前方しか見渡せませんでした。そこでつい先日この様にミラーを用いる事で瞬時に360°周りの様子を把握できる様に改良しました!↓こちらがロボットを操作するときに見える写真です。今後も大会に向け新しい機能も付けていく予定です! もっと見る







コメント
もっと見る