



2019/11/28 18:00

先日、11月23日に相模原市にて開催された「さがみはらロボット大学校」の一環として本ロボットの組立教室が実施されました。
試作品によるを組み立てを行いましたが、接着剤が必要であったり、わかりづらい点もあったことから足の取り付け方法を見直しました。
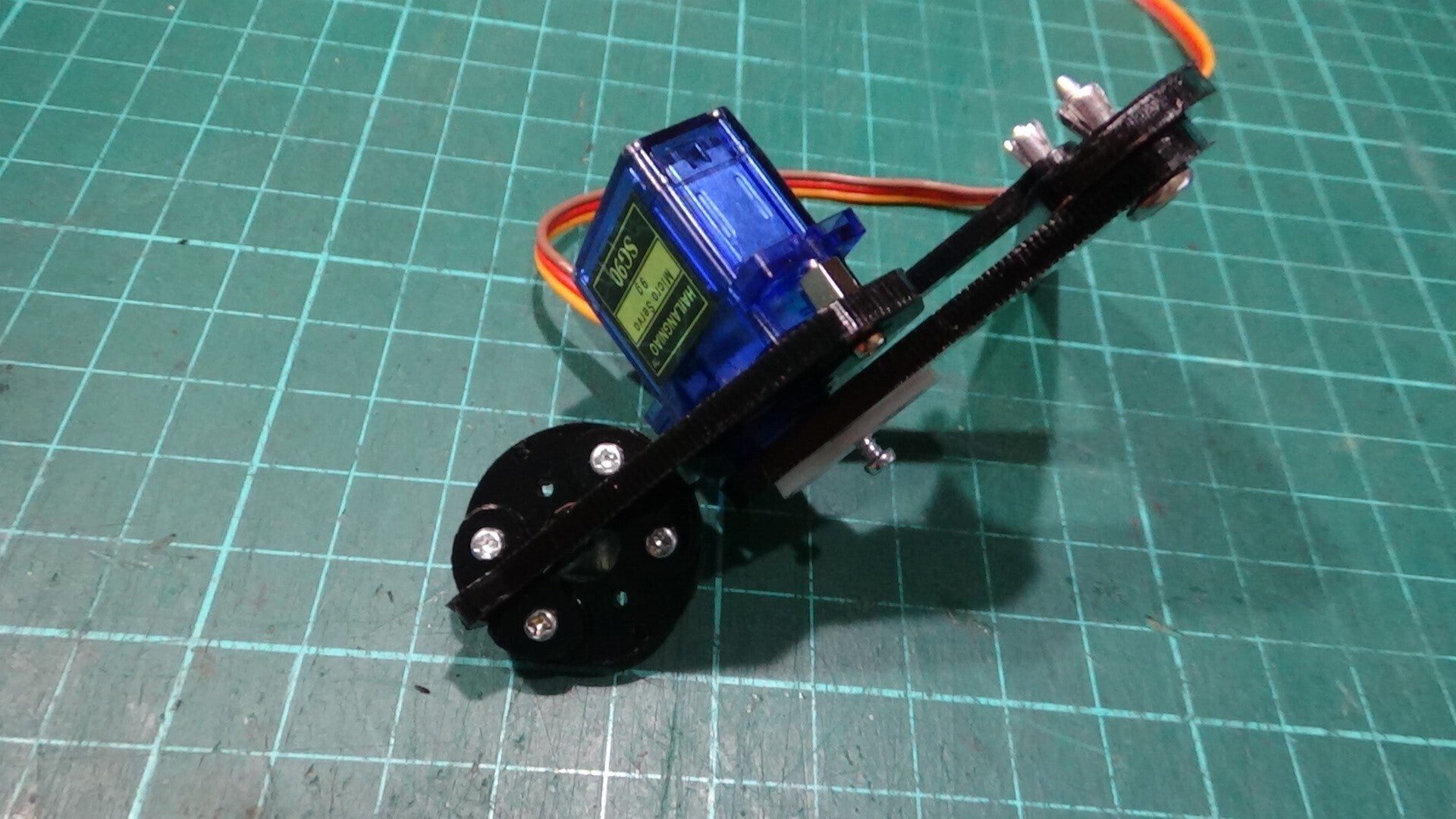
ニュートラル時の位置合わせの目印を入れました。

ねじの下に目印としてスリットを入れてます
 今度は接着剤が無くても結構がっちり止まります。ねじは2か所でも止まりますが、4か所のほうががっちりします。
今度は接着剤が無くても結構がっちり止まります。ねじは2か所でも止まりますが、4か所のほうががっちりします。
「クアッド・クローラー」は今後とも、改良を続けていきますので、継続でのご支援をよろしくお願いいたします。








