




2020年研究経過報告書
阿依ダニシ
堀井樹
本研究の経緯について
本研究はもともと阿依ダニシ及び堀井樹によって別研究として別れていたものが合併し、行われたものである。まず阿依ダニシは元の研究において、火星探査におけるセンシングシステムの効率化を題目にし、主にセンサー系また、その統合利用による火星探査を研究していた。一方堀井はヘリ型UAV本体の開発を題目とし、シングルローター式の利点をいかした農業や過酷な環境でのUAV運用を研究していた。2020年2月より本格的にUAVを用いた火星探査を研究題目として扱うようになる。すでに各々が研究していた内容を統合することで火星の探査を発展させ、その過程で開発された機体は地球上での運用においても大いに活躍を期待できるものと考えた。以下2020年2月より新体制で行われたこの研究における実績を紹介する。
日付
タイトル
内容
2020/1
•AIAA Scitech Forum 2020
アメリカ航空宇宙学会における最大級の発表会にて、最新の航空機研究や火星探査UAVの研究を調査

2020/2
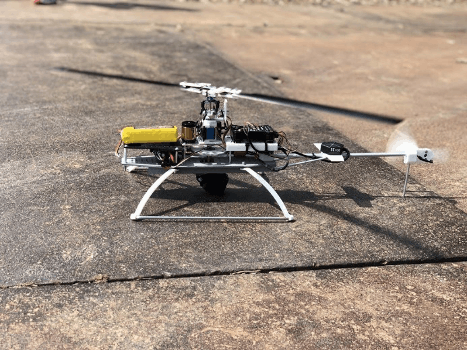
•火星砂サンプル採取試験
当初の目的である砂サンプル採取の実証試験を実施
実際にヘリに開発した採取機構を搭載し、試験した。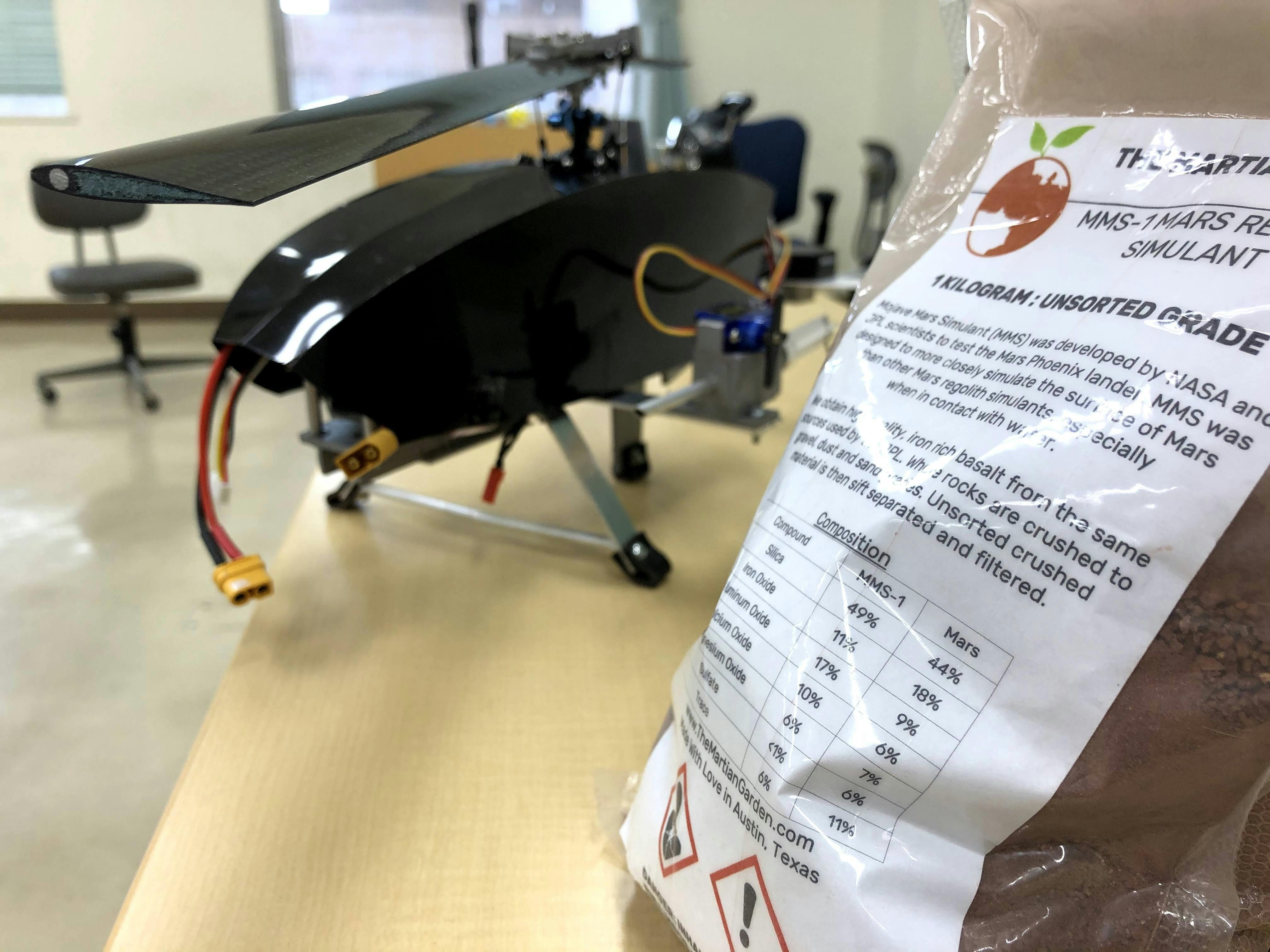
2020/2
•第2回火星ヘリコプター研究会
東北大学で開かれた第2回火星ヘリコプター研究会に参加
日本における最新の火星ヘリ関係研究を調査

2020/2
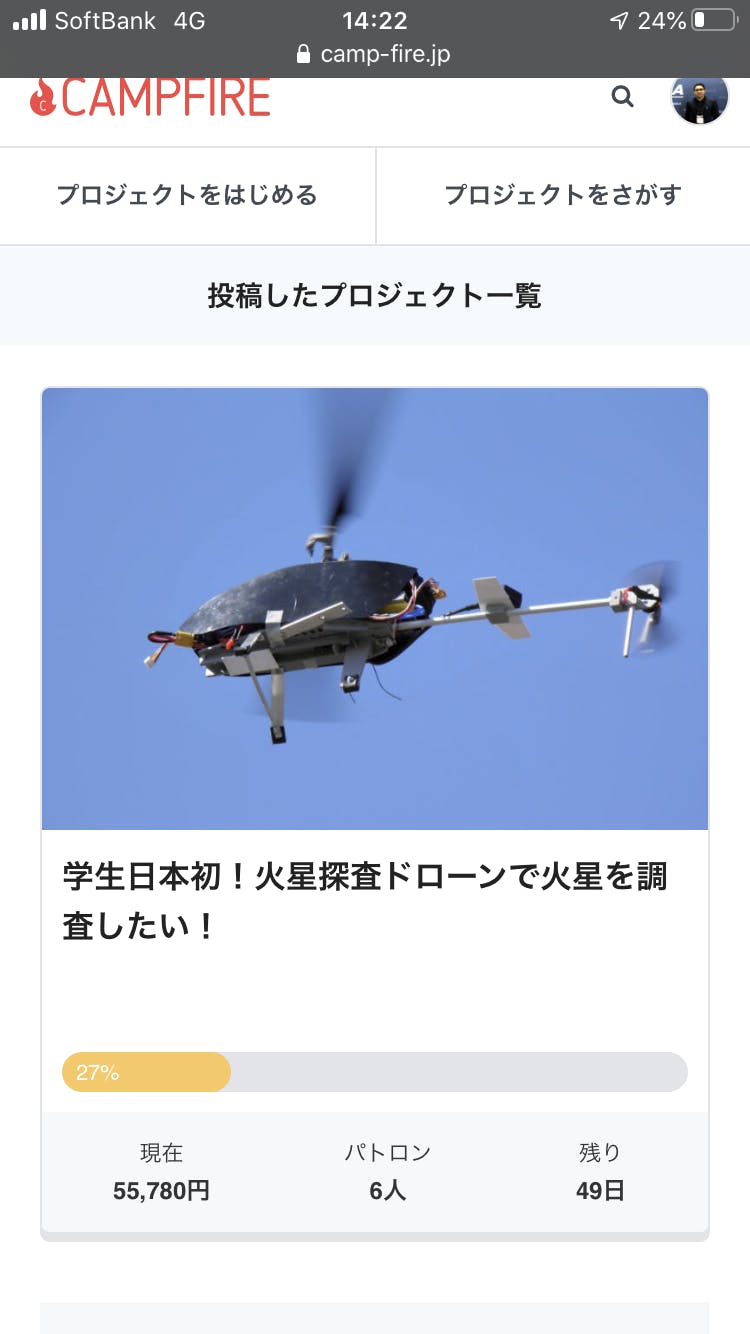
•Campfireスタート
資金調達のためクラウドファンディングを発足。
2020/2
•Paris Space Week 2020
フランスのパリで開かれた国際学会に参加し、ベンチャー企業ベースでのヨーロッパ圏宇宙開発を調査

2020/3
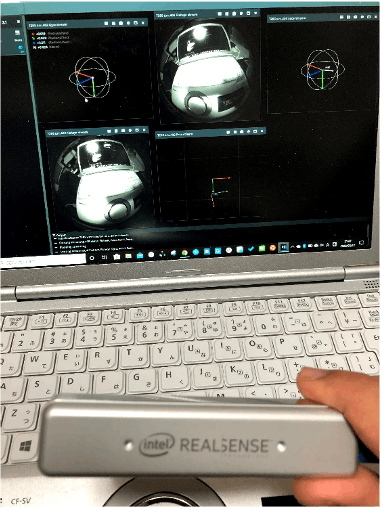
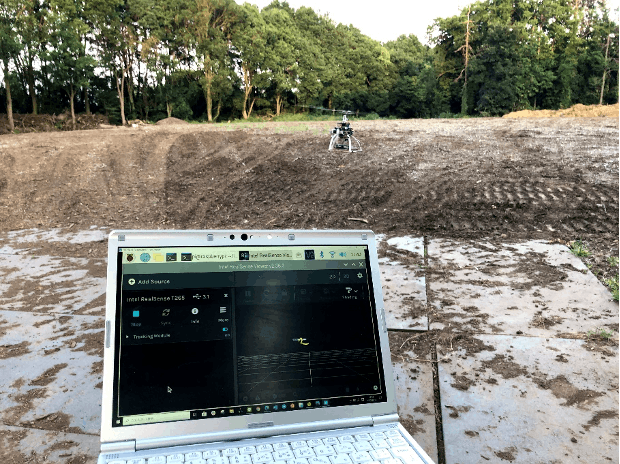
・Intel real sense t265
導入
Intel real sense t265 を試験的に利用
将来的なVSLAMのための技術勉強
2020/3
部屋での簡易的マッピング試験の実施
部屋や屋内での簡易的飛行などによりマッピングを試すが、結局すべて失敗に終わる(試験回数のべ50回以上)


2020/4
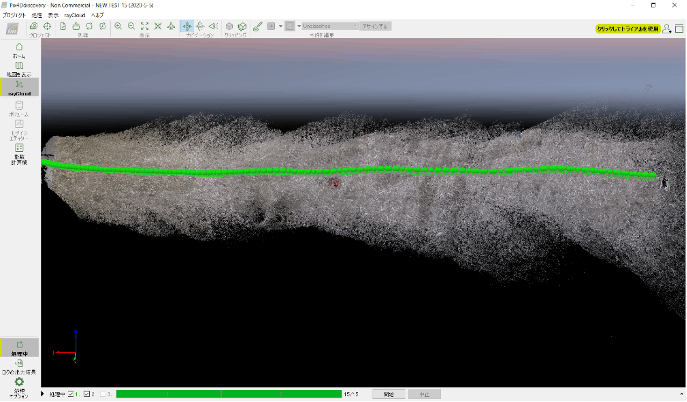
マッピング成功
4月上旬、マッピング用の飛行方法を確立
ようやく野外での試験ができ、マッピング技術も確立する

2020/4
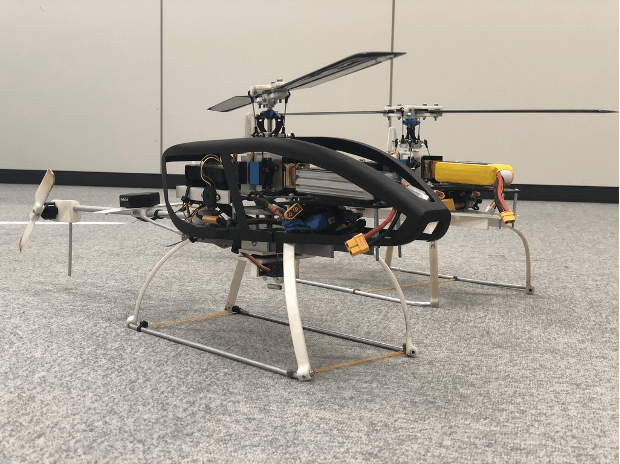
2機目 オリンポスの完成
搭載機器及び、ヘリの使用頻度から2機目の開発を決定
より大型でパワーアップした機体「オリンポスが完成」

2020/4
本格的マッピング実験開始
ヘリの飛行安定性を実証後、本格的に火星マッピングに向けた試験を開始
50回以上のマッピングを行う

2020/5
マッピングの完成
第64回宇宙科学技術連合講演会向けの論文作成
マッピング技術を確立し、多くの結果をもとに分析
第64回宇宙科学技術連合講演会に向けた論文執筆
2020/6
揚力測定装置完成
今後の機体開発及び、火星での飛行に向けた実験のために揚力測定装置を開発、製作して完成

2020/6
揚力測定実験
マウントを完成させ、実際に実験を行った

2020/6
新しいクラウドファンディングacademist発足
academistにより、30万の資金調達に成功した。

2020/7
3機目「マーリン」完成
マッピングにより飛行回数が多くなりすぎた「オリンポス」とともに2台体制を整えるべく「マーリン」を開発

2020/7
Raspberry pi 無線通信
ここまで実験及び機体開発の裏腹、Real sense などのセンサーを搭載したモジュールをヘリに搭載するべく、マイコン開発をやってきた
Raspberry pi で無線通信を確立、センシングシステム確立。

2020/7
機体部品開発
企業と協力し機体部品を開発
2020/7
山口県秋吉台第1回試験
山口県秋吉台にてマッピング及びセンシングの第1回試験を実施

2020/8
Raspberry pi システム完成
秋吉台での実験で失敗に終わったRaspberry pi のセンシングシステムを再度開発し、実証実験を行って完成させる
2020/8
山口県秋吉台実験第2回
第1回に次いで、三次元測量と自己位置推定、探査プローブ投下の実験を行った。探査プローブは、ドリーネ(縦穴)の温度などの気象条件の観測に成功した。

2020/9
新3Dプリンター導入
今後のため3Dプリンターを新調した
2020/9
秋吉台でのデータ分析
夏に行った実験の結果をまとめ、「第64回宇宙科学技術連合講演会」にて発表を行った。
2020/10
揚力測定実験
実験室にて揚力測定実験を行った。

2020/10
第64回宇宙科学技術連合講演会
オンラインで実施された今回の宇宙科学技術連合講演会にて発表
2020/10
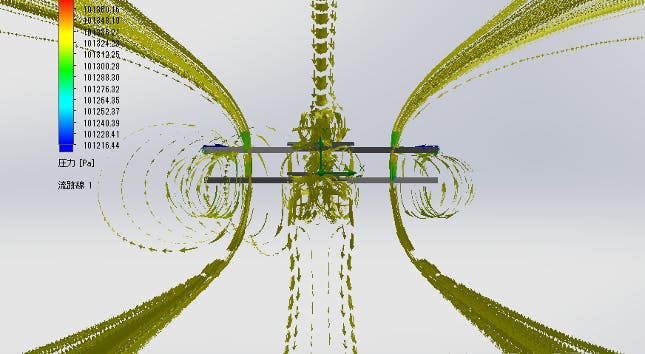
揚力実験ひと段落
揚力実験のデータも集まり、CFD解析も行った
2020/11
AIAA Student conference 2020 への論文執筆
国際学会であるAIAA Student conference 2020への論文を執筆
2020/11
ABlab などのコミュニティに参加
様々な宇宙関連のコミュニティに参加し、多くの情報を入手し、今後の方針を考える
2020/11
AIAA Region Ⅶ student Sydney conference
国際学会であるAIAA Region Ⅶ student Sydney conferenceにて学会発表
2020/12
Cansat モデル開発
投下用のCansat モデルの開発開始

2020/12
小型ローバー2輪 4輪完成
2輪「Phobos Ⅱ」及び4輪「ExplorerⅠ」に完成

二輪超小型ローバー(CanSat) [PhobosⅡ]
ウェラブルカメラを搭載し、遠隔操作にてコントロールする。
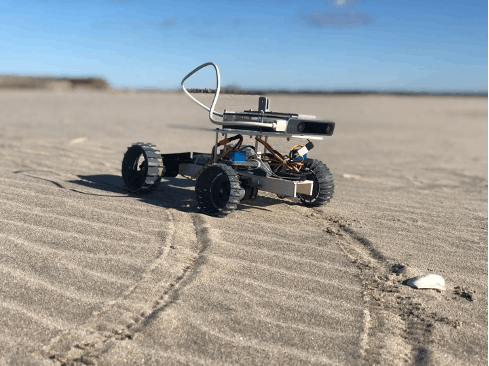
四輪小型ローバー [ExplorerⅠ]
前輪ステアリング方式の四輪ローバーで、自己位置推定システムを搭載。以後、自動運転システムを搭載予定。
2020/12
第1回砂地試験
ヘリやCansatの試験のために、福島県四倉海岸での試験を実施

無人ヘリのデータもとに、ローバーを支援する。
まとめ
本研究は当初の2月の予定より大幅に進捗を生み出し、多くの実績を残してきていると私たちは実感しています。驚くほどの機会に恵まれ今年1年でかなりの成長を遂げました。なおここまでクラウドファンディングとしてCampfire及びAcademistを活用し多くの方に支援していただきました。本当にありがとうございます。当初の予定であったリターンを十分に提供できず申し訳ございませんでした。実際のところコロナで影響を受けて研究が滞っていたことは全くなく、むしろ活動量が爆発的になってしまったため、ご報告が遅れる結果となりました。この書類をもって2020年の報告書関連リターンは以上とさせていただきます。今後はさらにクラウドファンディングを設立し、資金のご協力をお願いするとともに、2021年初頭での起業を目指しております。皆様のご支援で私たちはここまで来ることができました、またご協力いただけると幸いです。
