2020/12/25 10:40

少し遅くなりましたが、9月〜10月の活動をまとめました!!
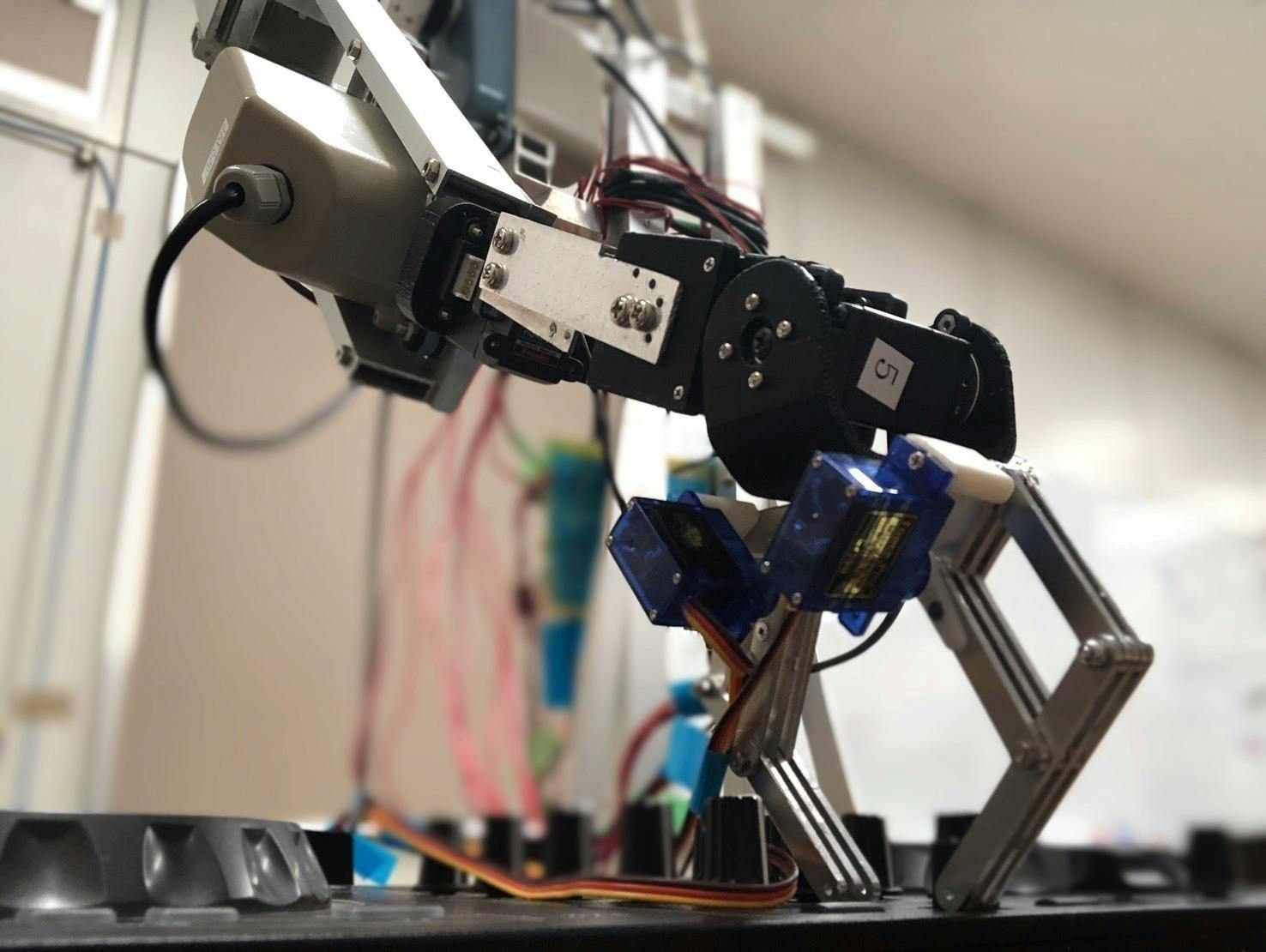
まず、DJをするための核となるロボットアームが完成しました!!
基本的な平行リンクで構成されています。サーボモータはSG90を使用しており、制御はPWMで行っています。
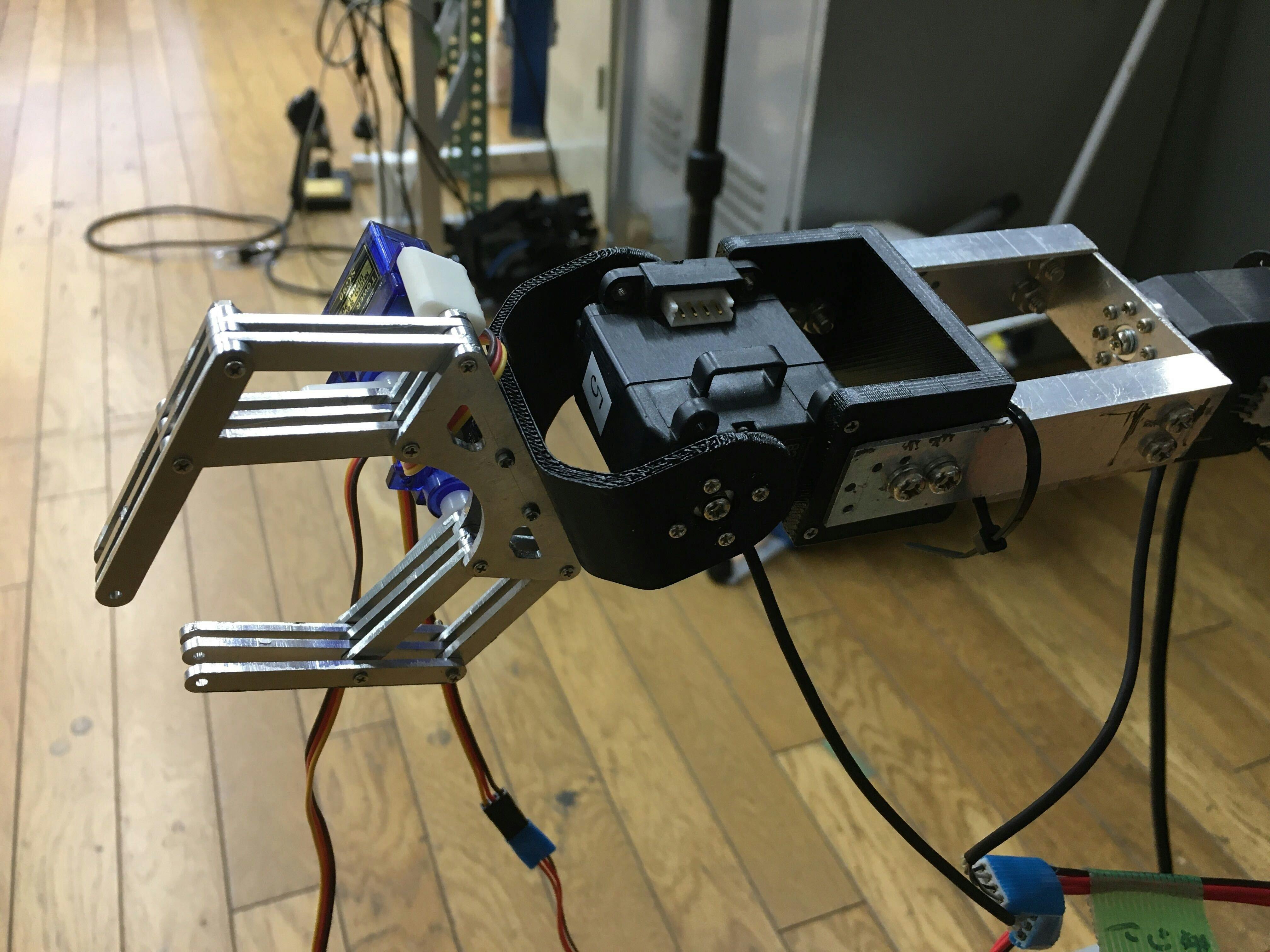
今回PVで動かした際はPWMを用いて制御していたのですが、速度の制御が出来ずとても苦労しました、、、笑
今回の1号機(Lynx)の開発では、全員一致でコマンド制御しようとなりました。こう言った意味でも、試作機を開発して動かした価値はあったと思っております。
次にアームを動かす際に慣性力が働いてしまうため、土台を作成しました。

やはり土台をつけると付けないでは、安定感大きな差がありました。しかし腕が重すぎるので、土台にも重りを乗せた方が良いということもわかりました。これらもLynxの開発に活かしていきます。
最後にロボットの全体図です。
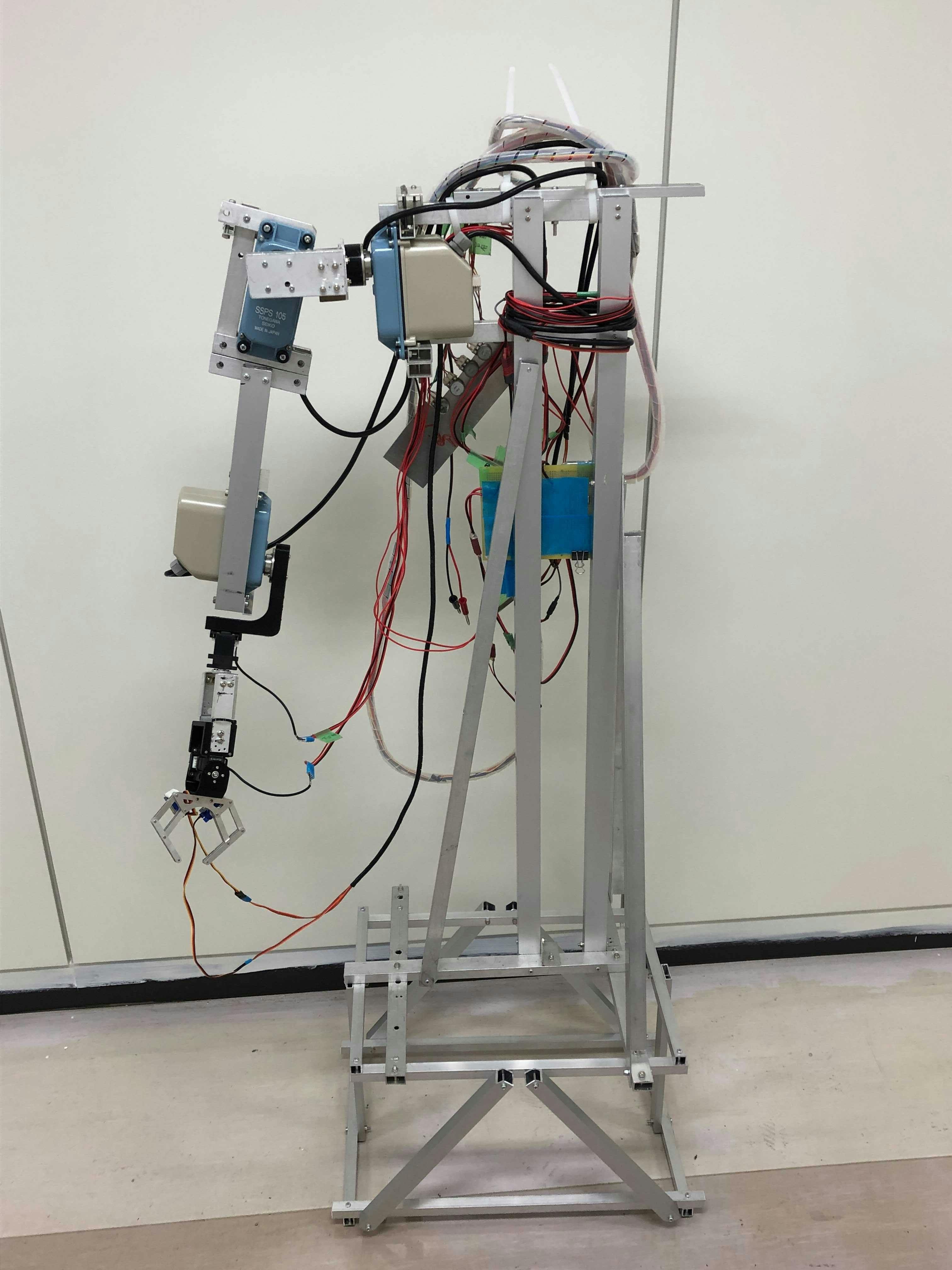
まだ、ロボット感が否めないですね、、、笑
顔や外装をつけてロボットに魂を込められるよう頑張って参りますので、応援よろしくお願いします!!
