


ソーラー無人航空機という未来を作る。
本ページをご覧いただきありがとうございます。
早速ですが、「ソーラー発電で飛ぶ無人航空機という新しい未来」を一緒に作りませんか?
本プロジェクトはソーラー発電で飛ぶ無人飛行機という新しい未来を作るため、ソーラー無人飛行機における「日本初の24時間飛行記録挑戦」という声に共感した若手技術者たちが集まりました。日々の仕事を終えた後の少ない時間の中で、 設計・製作・試験・データ解析の作業を若干20名弱のメンバーがそれぞれ担い、まだまだ世界中で研究途上であるソーラー無人飛行機の開発に取り組んでいます。
しかし、20~30代の若い技術者たちが、壮大な目標に向けて有志で集まったチームですので、資金は完全に個人の持ち出しです。また、飛行機という大きな物作りをするにあたり、自分たちで栃木県の一軒家を借りるなどして、なんとか活動拠点・時間・資金を確保している状況です。

もともとメイドインジャパンの航空機をいつしか復活させたい、取り戻したいという気持ちが根底にあり、このプロジェクトを立ち上げました。
従い、まずは目先の「日本初の24時間飛行記録」をなんとしても樹立するため、強いては「ソーラー発電で飛ぶ無人航空機という新しい未来」を作るため、今回このキャンプファイアで支援していただける方を募集しております!

これまでの実績
下記の活動実績で、機体製作・自動飛行・データ計測のノウハウを得ることが出来ました。
これからはいよいよ、24時間飛行を達成するために設計を見直し、機体性能を向上させ、太陽光発電をしながら飛行するシステムの実証を進めていきます!
(1)翼幅2mのサブスケール機の飛行試験
本番機と同様の構造で、翼幅2mのサブスケール機を製作しました。これは、実際に自身らの手を動かして物を形にすることで、本番機を作る際の製作ポイントや課題点を明らかにすることを目的としています。これを行うことで、構造材料や、主翼ー胴体結合部の構造を見直す必要があることが明らかになりました。

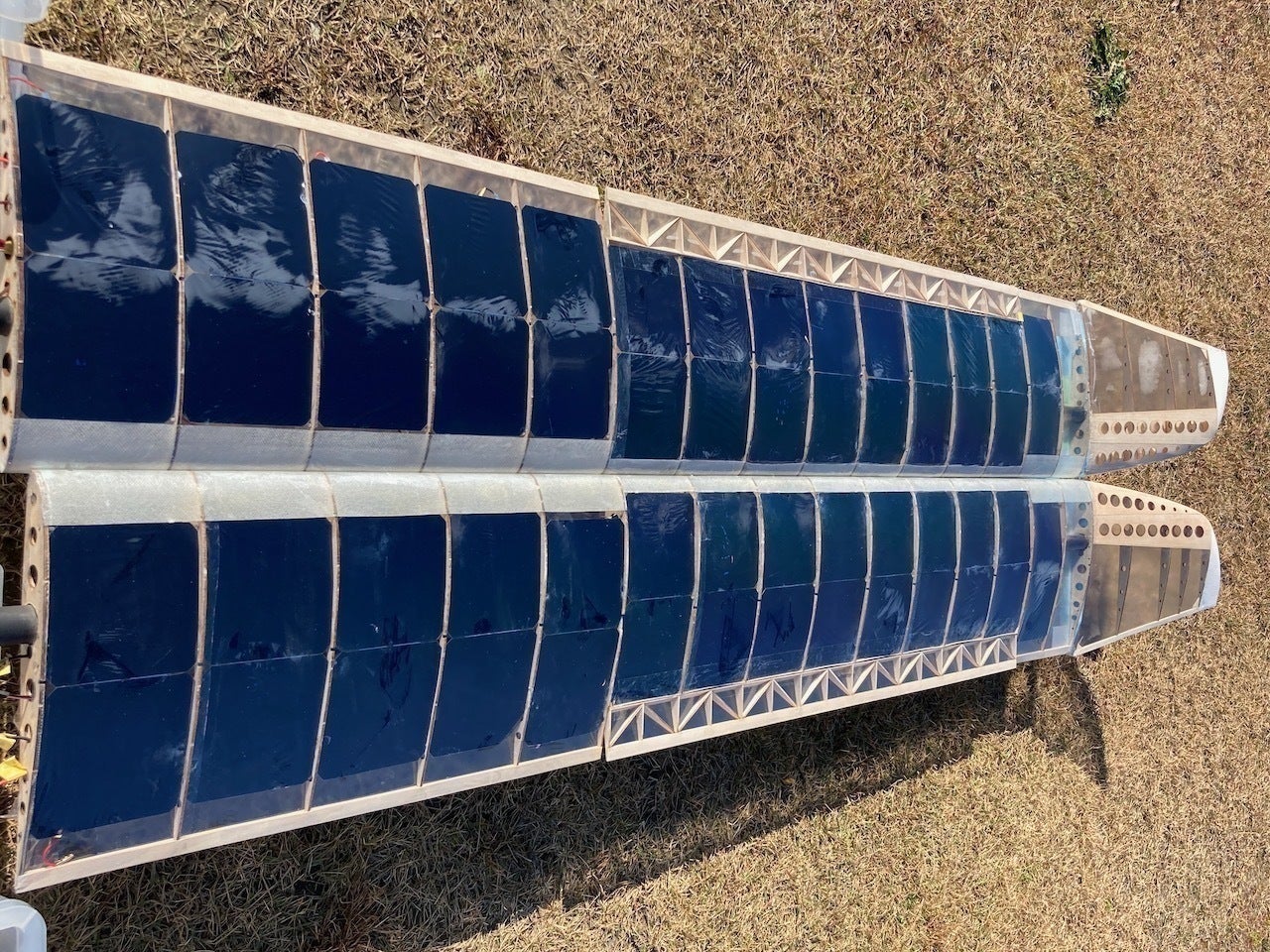
(2)翼幅5mの本番機の飛行試験
サブスケール機の課題点をふまえ、本番用の機体を製作しました。まずは飛行機としての完成度を確認するために、この時はソーラーパネルや高出力のバッテリーは搭載していません。
メンバーも増え、2020年10月に初飛行(冒頭の動画)までこぎつけることが出来ました。

今後のスケジュール
※2021年5月25日現在の情報ですので、今後変更となる場合がございます。
2021年
2月: 飛行試験による機体データ取得
3月~4月: 性能向上に向けた再設計
4月~6月: 機体製作
7月~: 第1回 24時間チャレンジ飛行試験
その後、2021年8月末まで必要があれば飛行試験を継続。
SNSでも情報発信中!是非フォローお願いします!
▽ Youtube
https://www.youtube.com/channel/UCi062V-h_1fuASlH49mpueQ
▽ Instagram
https://www.instagram.com/aircraft_laboratory/?hl=ja
▽ ホームページ
https://utsunomiyasolarplane.weebly.com/
資金の使い道
活動拠点の家賃と、必要物品(太陽光パネル、バッテリーなど)の購入に利用させていただきます。
リターンについて
応援して頂けた皆様が、共にこのプロジェクトの達成を感じられるようなお礼を考えております。
◆お礼のメール
支援者の皆様には、プロジェクトの進捗状況と飛行試験のお写真を添えて感謝のメッセージを送らせていただきます。
◆限定公開動画の配信
24時間飛行チャレンジ当日の模様を、動画を通じてお伝えいたします。
◆協賛者名の掲載
感謝の意を込めて、支援者の皆様のお名前を、ホームページや飛行試験動画に掲載させていただきます。備考欄に掲載するお名前をご記入ください(掲載を希望しない場合は、「掲載不要」とご記入ください)。
◆記念品(機体模型クリスタル)の提供
お部屋のインテリアとしても使えるオリジナルの記念品を贈らせていただきます。
小は1.5cm×2cm×3cm程度、大は5cm×5cm×8cm程度のものを提供する予定です。
※大きさは変更する可能性がございます。ご了承ください。
加えて、この取り組みで得た技術的な成果はホームページやブログ等でネット上に公開し、応援して頂けた皆様以外の方も含めて共有します。
その他
※本プロジェクトはAll-in方式で実施します。目標金額に満たない場合も、計画を実行し、リターンをお届けします。
※本プロジェクトは「チャレンジ」クラウドファンディングにつき、24時間連続飛行が必ず達成できることを保証するものではございません。万が一、24時間連続飛行がリターン予定月までに達成できなかった場合でも、支援額の返金は受け付けませんので、予めご理解のほど宜しくお願いいたします。
最新の活動報告
もっと見る
リターン「お礼のメール」「記念品の提供」を送りました!
2021/08/23 06:52ご支援頂いた対象者様にお礼の品として私たちより「お礼のメール」「記念品」をお送り致しました。「お礼のメール」については活動記録や購入品、機体写真などを載せましたので、最後までお読み頂けると幸いです。「お礼のメール」「記念品」がまだ届いていない方がいましたらご連絡ください。また、24時間飛行チャレンジについては8/28(土)~29(日)を予定しております。結果についてはCAMPFIRE本プロジェクトページやHPに掲載致します。是非とも楽しみにお待ちください。今後とも本プロジェクト活動をよろしくお願い致します。 もっと見る
ソーラー無人飛行機が実現すると?
2021/06/23 06:00そもそもソーラー無人飛行機が実現すると、私たちの社会にとってどのような嬉しいことがあるのか?ソーラー無人飛行機の価値は、太陽光発電を利用することによって「長時間飛び続ける」ことです。この「長時間飛び続ける」という機能は、私たちの生活に様々な恩恵をもたらす可能性を含んでいます。通信局としての利用まず、スマートフォンやパソコンを使用する際の、インターネット通信のための基地局としての活用が有力な例として挙げられます。飛行時間が短いものであれば飛ばす手間がコストとなってしまいますが、一度飛ばしてずっと飛んでいられるのであれば運用も現実的なものとなります。最近ではソフトバンクのような大手通信会社が、成層圏に無人航空機を飛ばすことで、基地局整備の難しい地域への通信サービスの拡充を目指しています。ソフトバンクニュース, 雲上の基地局「HAPS」。無人航空機の成層圏テスト飛行とスマホ同士の通信に世界で初めて成功https://www.softbank.jp/sbnews/entry/20201013_01 山岳地帯など、地上の通信設備の維持管理にコストがかかる地域にも、無人航空機の航続範囲内であれば、より低コストで通信サービスを提供できる可能性が考えられるため、快適な登山を楽しむことができるようになるかもしれません。また、何らかの理由で一時的に地上の通信設備が使用できない状態(例えば停電など)でも、緊急の連絡が必要な際に迅速な通信サービスが行えるようになるかもしれません。災害時の観測前述の通信局としての利用と重複する部分はありますが、災害時における通信サービスの中継ポイントとしては有効であると考えられます。特に、日本のように地震や津波といった自然災害が発生する地域では、地上の通信基地が使用できない状況に陥ったとしても使える堅牢なシステムの構築は、今後重要となってきます。また、同時に観測機としての利用も考えられます。例えば山火事など。墜落による二次災害や、有人機の救助や消火活動等の邪魔にならぬよう配慮したシステムである必要はありますが、危険地帯の状況把握、人命の確認等の活用が可能であると考えます。JAXA航空技術部門, 災害対応航空技術(D-NET2)https://www.aero.jaxa.jp/research/star/dnet2/災害時にはとにかく早く、正確な情報が必要となります。そのために、航続時間と速度の速いソーラー飛行機は、人間の代わりの「眼」となる存在になりえるでしょう。気象調査および観測観測という利用ができるのであれば、災害時でなくとも地上・気象の観測機としての利用が可能です。長時間滞空し続ける気象観測機があれば、変化の激しい天候も予測が早くなると考えられます。特に私たちの住む栃木県宇都宮市は、夏の夕方になると南風が盆地によって押し上げられ雲を形成し、急な夕立と雷が発生します(昼間は晴れていても…)。こういった局地的で、リアルタイム性の高い気象の予測は、シミュレーションのみでは未だ難しい段階にあります。そのため、正確な予測のためには、実地での気象データによる予測データの補間が必要なのです。近年ではマルチコプター型のドローンによりこのデータを取得しようという動きもあります。メガソーラーニュース, ドローン向け気象情報を提供、NEDOと日本気象協会が実証https://project.nikkeibp.co.jp/ms/atcl/news/16/102009608/?ST=msbソーラー飛行機は、マルチコプター型ドローンよりもより速く長く飛べるため、宇都宮市の雷のような現象を早期に予測することが可能になるかもしれません。以上が、ソーラー飛行機の実現によって私たちの社会にもたらされると考えられるものです。固定翼航空機はマルチコプター型よりも滞空性能において優れているドローンという言葉が出ましたが、ここで少し脱線して、一般に浸透しているいわゆる「ドローン」と、私たちが作っている飛行機型の無人航空機(これも、ドローンの一種)の違いについて書いていきます。私たちが開発しているような、固定された翼を持つ形の飛行機は、現在活発に利活用が進められているマルチコプター型(いわゆる「ドローン」)よりも、長時間飛び続けるということが得意です。理由は、それぞれの飛ぶ原理の違いにあります。マルチコプター型の航空機は、機体に取り付いているプロペラの回転によって揚力を発生させています。各プロペラの回転数を変化させることによってそれぞれの揚力を調整し、機体の姿勢(上昇・降下、前進・後退)を制御するため、操作がシンプルで直感的、小回りが利くなどの利点があります。しかしその反面、プロペラを常に回転させていなければ機体を空中にとどめる力が無くなってしまうため、飛行中は常に動力を発生させ続けていなければなりません。マルチコプター型無人航空機, DJI, Phantom 4 Prohttps://www.dji.com/jp/phantom-4-pro 一方、固定翼型の航空機はプロペラによってではなく、翼に風が当たることによって揚力を発生させています。下の図は揚力の発生原理を模したものですが、翼に風が当たることで翼の上下に圧力差が生まれ、その圧力差が翼を持ちあげる力になります。原理的にはプロペラが力を発生させるものと同じですが、言い方を変えれば、固定翼は機体が前進することによって風を翼に当てているのに対し、プロペラは翼自身が回転することで風を翼に当てているということになります。揚力の発生原理つまり、揚力を発生させる翼への風の当て方の違いが、マルチコプター型と固定翼型の違いと言えます。飛んでいるために必要なことを比較すれば、鳶(トビ)が風を利用して滑空していられるように、常に翼を回転していなければならないマルチコプター型よりも固定翼型の方が燃費という点では優れています。滑空する鳶Canon Global, 鳥のヒミツをときあかせ vol.2, 鳥はなぜ飛べるの?https://global.canon/ja/environment/bird-branch/bird-column/kids2/index.html これらの理由から私たちは、固定翼機の高い滞空性能と、ソーラー発電による持久力に着目し、現在のような機体を開発しています。ちなみに、ソーラー飛行機の滞空時間の世界記録は高度21kmの成層圏を飛行するエアバスのZephyr Sで、その記録は25日23時間57分にも及びます。CNET Japan, エアバス、ソーラー発電の無人飛行機で26日弱の無着陸飛行https://japan.cnet.com/article/35123971/現在日本にはこれほどの長時間飛行の記録はありません。また、前述のソフトバンクの合弁会社であるHAPSモバイルも、米国AeroVironment社と設立しており、いずれも海外の技術が先んじているのが現状です。しかし、日本でも安価に広くサービスを拡充していくためには、国内でも開発できることが望ましいと言えるでしょう。私たちが作っているものはまだまだ手作りの小さな飛行機です。しかし、規模は違えども、工学者が工学的な問題を一つ一つ解いている限りは、最新技術もその延長線上にあります。小さくても、まだ自分たちができていないことを認識し、それに取り組む。こういった活動を継続することが、将来の布石になると信じています。 もっと見る
墜落!
2021/06/16 07:30川霧立つ厳冬の朝、給電システムのチェック、Li-ionバッテリーの消費電力計測、自動飛行のためのパラメータチューニングのための飛行試験を実施しようとしていました。外気の寒さによりソーラーパネルにも霜が付着。今回は太陽光発電も試験項目にあったため、配線作業の合間に翼を拭きつつ、制御パラメータの確認を行っていました。日も昇ったころ、機体は無事に飛び立ち、これまでの飛行試験通りとても安定して飛んでいました。制御パラメータを変更した試験の実施中、突如機体が縦の振動をはじめ、そのまま発散しループを繰り返し始めた。立て直すこともできず、そのまま墜落…。藪の中の木に激突して墜落したため、機体回収のための捜索隊がその場で発足しました。バレンタインデーに草を掻き分け、機体はほぼ全回収しました。(補足:本機は飛行許可を得ている飛行場で飛ばしており、飛行および墜落箇所は、民家等の無い飛行可能エリアです。)フライトログも回収できたため、起こった事象についてその後数週間かけて調査を行いました。まず、発散した付近のタイミングにおけるピッチおよびピッチレートの目標値(setpoint)と実際の値を確認すると、機体が制御目標値に追随できず、発散している様子がわかりました。発散したタイミングで、パイロットの意図と異なる急なピッチ上げ操作と推力上げが発生していました。機体の自動制御は、上記で確認したパラメータであるピッチと推力を相互に制御する、PX4のTECS(Total Energy Control System)というロジックに基づいています。ここに原因があるのではないかと考え、TECSのログも確認したところ、Hight Rateの目標値が発散開始直前に急な上昇を見せていたことがわかりました。この原因として、機体由来のものと制御由来のものの両方が考えられますが、ここで、一連の議論で出た内容についてFTA(Fault Tree Analysis)を実施することで、要因について整理して俯瞰しました。残念ながら機体構造が破損しているため、原因を1つに特定することは難しいですが、今後の対策として、考えられた要因をすべて潰していくこととしました。1.モータ出力過剰であったことについては、飛行直前にキャリブレーションを行っていなかったことが要因として挙げられるため、実施する。2.機体製作に余裕を持たせ、装備品の固定箇所のチェックおよび修復箇所の確認時間を十分にとる。3.あくまで落ち着いて操縦すればリカバリ可能であったPIO(Pilot Induced Oscillation: パイロットが飛行を安定させようと操縦をするも意図と反した結果となる現象)であるため、チャレンジ当日までパイロットは無線操作の練習と習熟に努める。4.ピッチ角速度とTECSは相互にリンクする話であると考えられるが、制御システム側に問題がなかったかという観点でも調査を実施する。とはいえ、あくまでオーソドックスな機体設計や制御を行っているため、基本的には飛行機のイロハを徹底するというのが前提にあると考えております。失速特性について把握しそれに近しい領域で飛ばすようにしない、機体の各パーツの重量・重心位置を逐一管理し、機体特性をデータ化したうえで議論を行う、など、本来当たり前であることを丁寧に進めていくよう心掛け、24時間飛行チャレンジ当日まで手を止めず前進していこうと思います。 もっと見る








将来的に日本の誇りとも成り得る、産業応用技術の基盤づくりの研究ですね。若い研究者達が日本の物作りを支えようとしている姿を見られるのが、とてもうれしい! ウィキペディアにとばずに、それが伝わると分かり易いですね。