
 LINEで送る
LINEで送る
こんにちは。このプロジェクトが始まってから大体1年が経ちました。今回も進捗報告していこうと思います。
まず、レイの上半身用のサーボモーターを買いそろえました。これです!
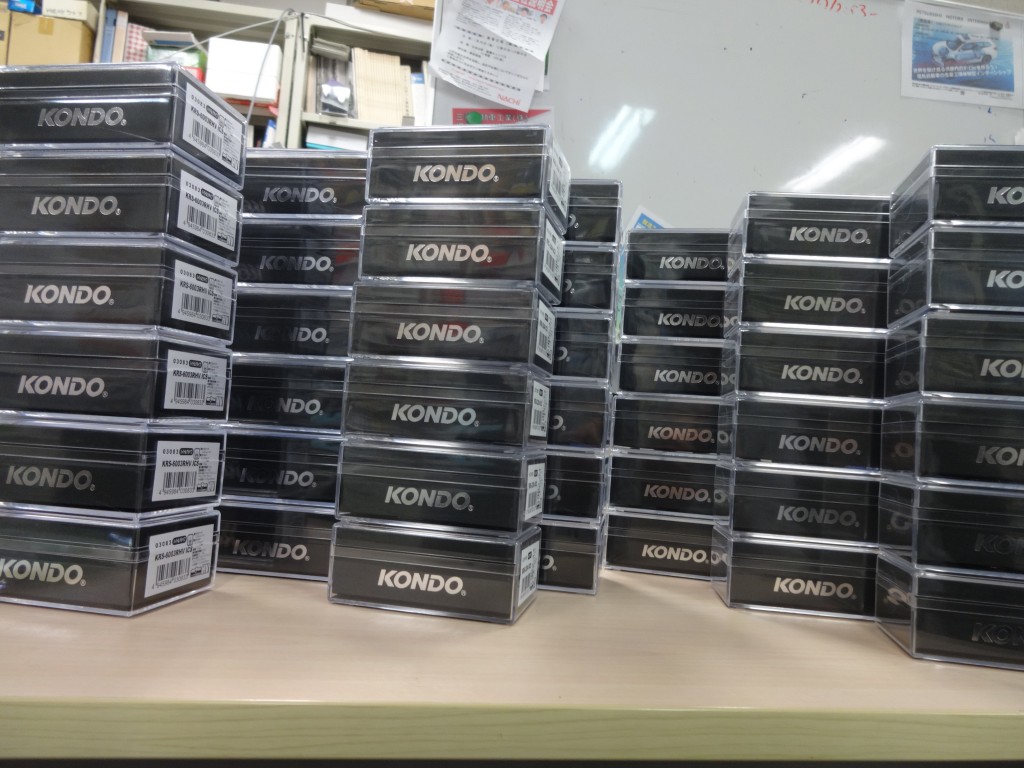
どーん
壮観。ビルみたい。内容はKRS-6003HV-Rを18個(肩・腕・首)、KRS-2572HVを6個(手首)、KRS-3204HVを18個(表情・指・手のひら)です。

左から3204,2572,6003
ミク(2号機)は足に6003を使っているので、それが上半身に来た感じでパワーアップです。しかしそれでも腕の力で体を起こす等の動作をさせようと思ったら少し頼りない力なのも確か。肩や首ピッチ軸には特別なやつをつけた方が良いかもしれません。開発中の脚部サーボと同じ感じで作ればさらにハイパワーにできそうなのですが、あまりに見通しが立たなくなってしまいそうなのでとりあえず上半身はこれで行く予定です。
指や表情には現在使っている小型高トルクラジコン用PWMサーボのかわりに小さいシリアルサーボ(一番左の3204)を使用。指サーボのトルクは2号機の1kgf・cm程度から9.3kgf・cmになるのでだいぶ握力が強くなり、かなり強力に物を把持できるようになると思います。「形を表現して見せるための腕」から、「実際に物理的な仕事にも使える腕」に。サインを書いたりするためにも!
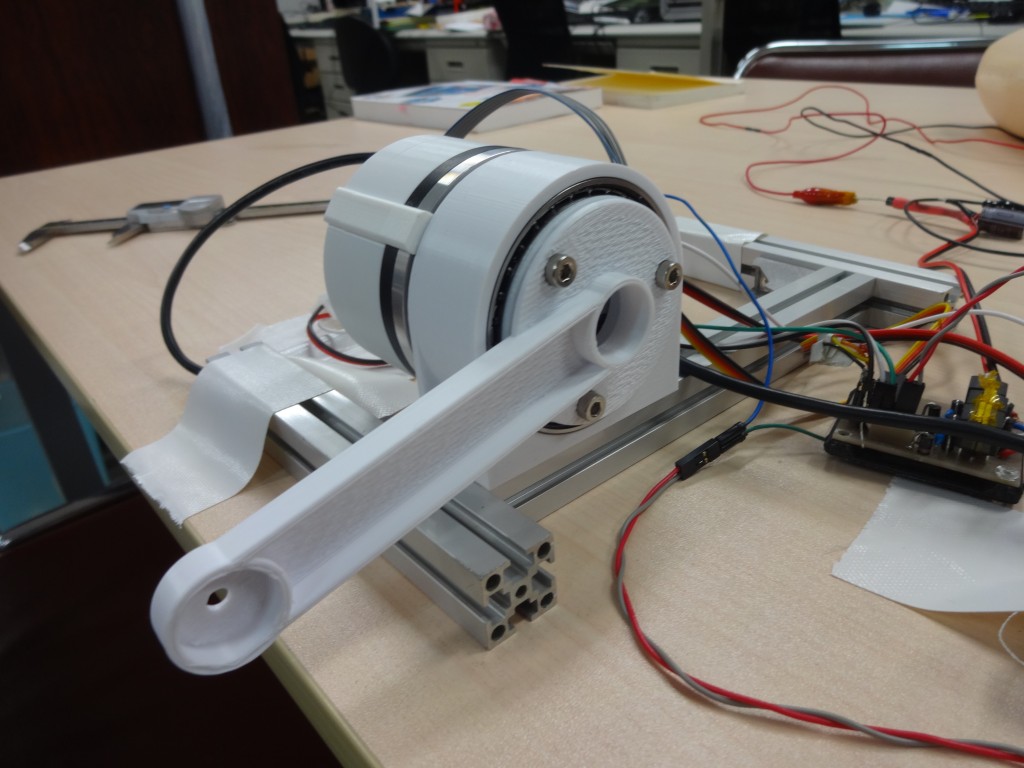
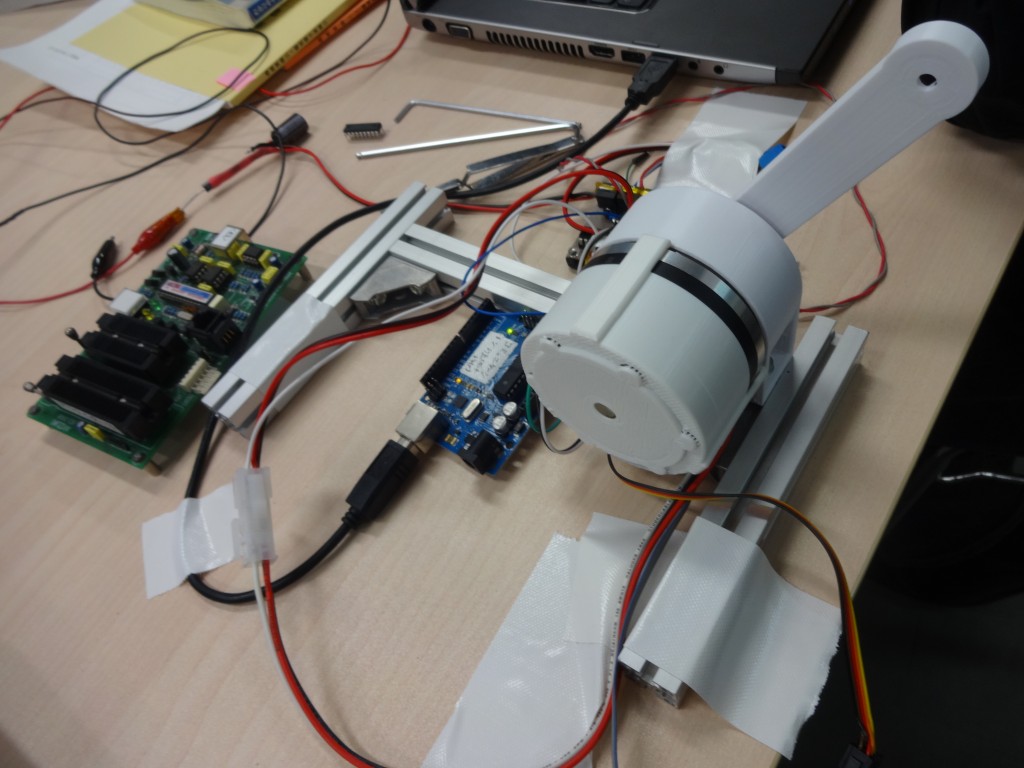
そして開発中の脚部の大型サーボですが、かなり開発が進んできました。これが外観、そして最近の動作実験の様子です。以前購入報告をしたMaxonの100Wモーターを使用しています。
http://www.nicovideo.jp/watch/sm32845370
↑ニコニコ動画版(同じ)
計算上ストール時約1450kgf・cmのトルクを発揮するのでこうなりそうのは分かっていたのですが(あえて本体より先にアームが壊れるようにしてます)、とりあえずかなりパワーを発揮できてることが分かったので良かったです。現在大学の同級生(院生)に今新しい制御回路を開発してもらっているので、それを搭載して位置制御等をPWMでできるように進めています。
前も書いた気はするのですが、現在提供してもらっている制御回路はもともと宇宙エレベーターで使用するように作っていた回路を流用しているので、かなり古い部品を使用してできています(枯れた技術)。検討した結果新規でもっと最新のチップを使った小型な回路を開発することにしました。彼に協力してもらえるのは非常に大きいです。
機体のほうに関してはとりあえず以上です。
実は最近というかここ半年くらい、レイの音声のほうの製作も進めています。もう一応音源ができてはいるのですが、現在製作動画を作ったりなんだりしているので公開はもう少し後になるとおもいます。お楽しみに!
あとは確定申告とか完了しないといけないのでいろいろ頑張ります!
ではまた






