




 LINEで送る
LINEで送る
こんにちは!
前回に引き続き進捗の報告です。
現在我々の活動は、ロケット外形と搭載する制御システムともに完成して、打ち上げのタイミングを待つのみとなりました!
そこで今回は、模型を使っての内部紹介と、制御システムの紹介です。
イメージが湧きやすいようにロケットを半分にした模型に無理やり搭載物を詰め込んでいます笑
ロケットは打ち上げから数秒が経つとエンジンの逆噴射によって二つに分裂して、パラシュートで降りてきます。
ロケット下部(上記画像の右側)にはパラシュートと、エンジンの熱から内部を守る難燃紙が搭載されています。
ロケット上部(上記画像の左側)には小型カメラやパラシュートを制御するシステム等が搭載されています。
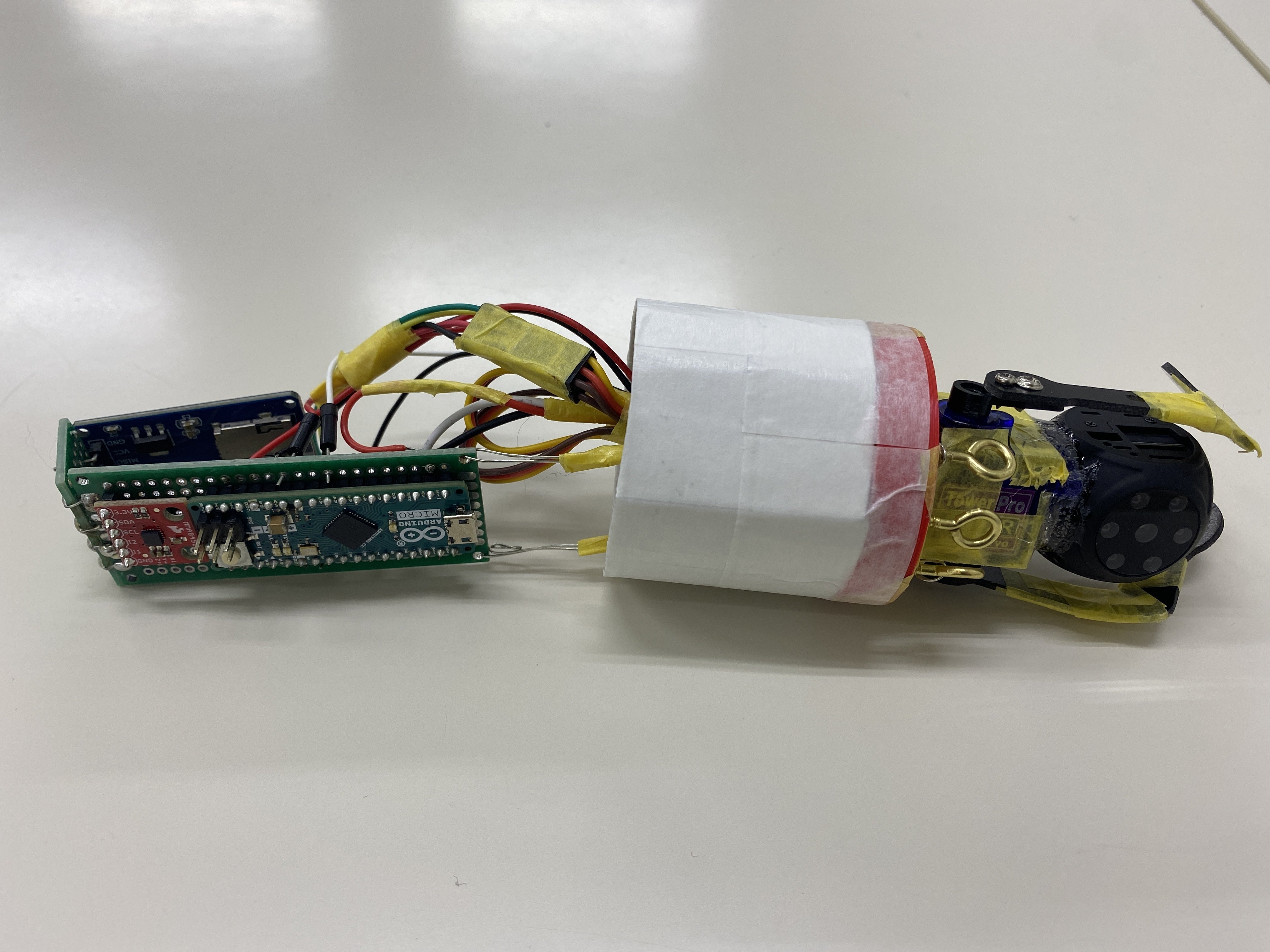
これが制御システムの全体です。 大きさはちょうど手のひらくらいの大きさです。
右側から順番に見ていきましょう。

真ん中の黒い物体がカメラです。打ち上げ後うまくパラシュートが展開すれば、空からの動画がこのカメラでバッチリ撮れているはずです。
カメラの両脇の黒い棒のようなもので、パラシュートを操作する紐を引っ張ります。パラグライダーで飛んでいる人が、何やら紐を引っ張って方向を決めているのを見たことはありませんか?根元の青いモータで動かします。結構な力持ちです!

裏側はこんな感じです。カメラの左側、GPなんちゃらと書いてあるのがGPSのアンテナです。自分が地球のどこにいるか、誤差2mで計算してくれます。
緑色の部分はLEDです。この部分が光れば、システムの準備がすべて終わって打ち上げ準備完了です!
もう少し左側を見ていきましょう。
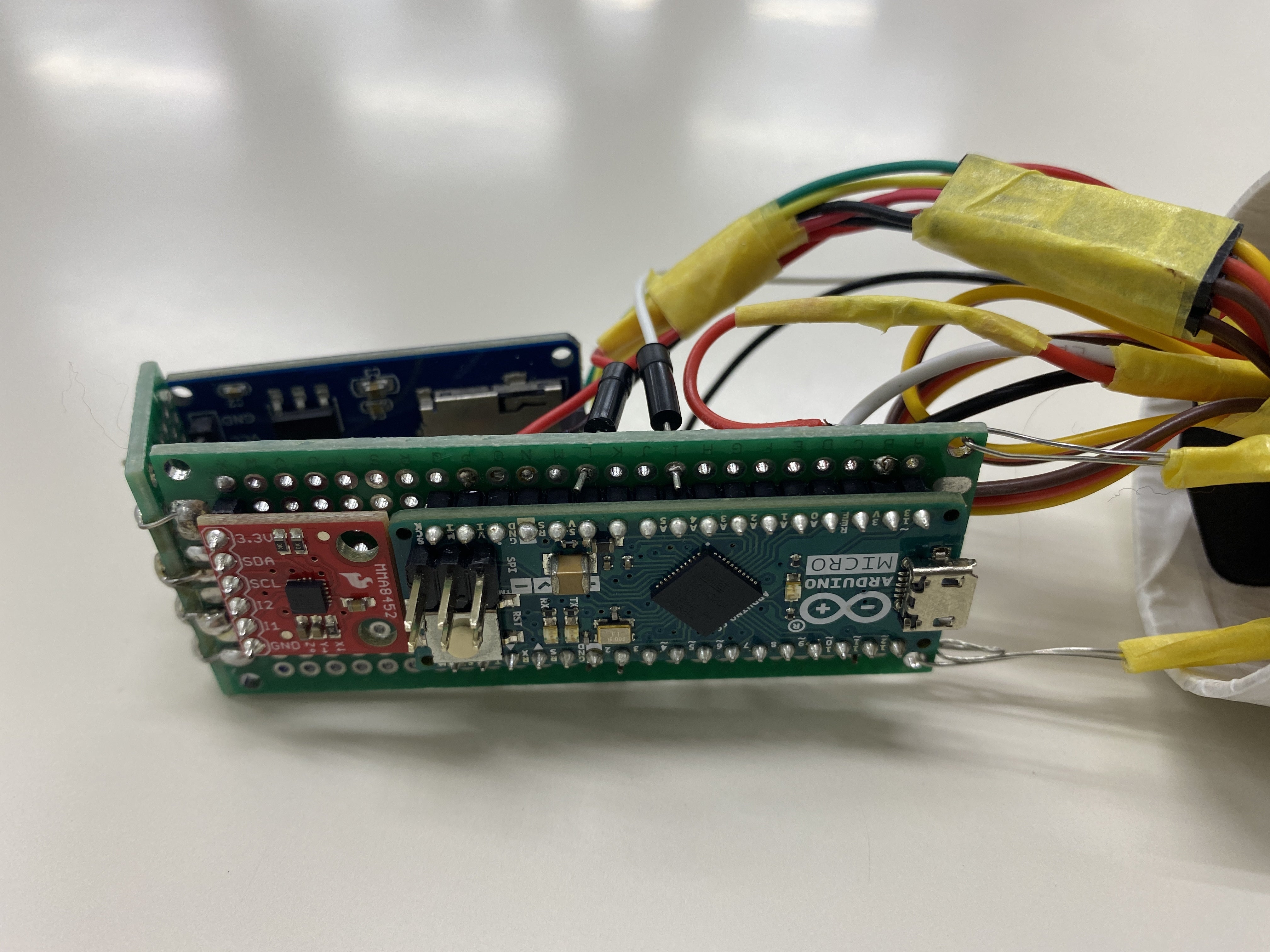
手前の右側緑色の基盤がマイクロコンピュータ、つまりロケットの頭脳です。プログラムがこの中に記憶してあります。受信した位置情報をもとに進行方向を計算してモータに命令したり、各種情報をSDカードに送信したりと常に脳みそフル回転です。
その左側、赤い部品は加速度センサです。打ちあがった衝撃を検知するために必要な部品です。先ほど紹介したモータが、打ち上げる前に中で暴れだしたら大変なので、発射したタイミングは確実に知らなければいけません。
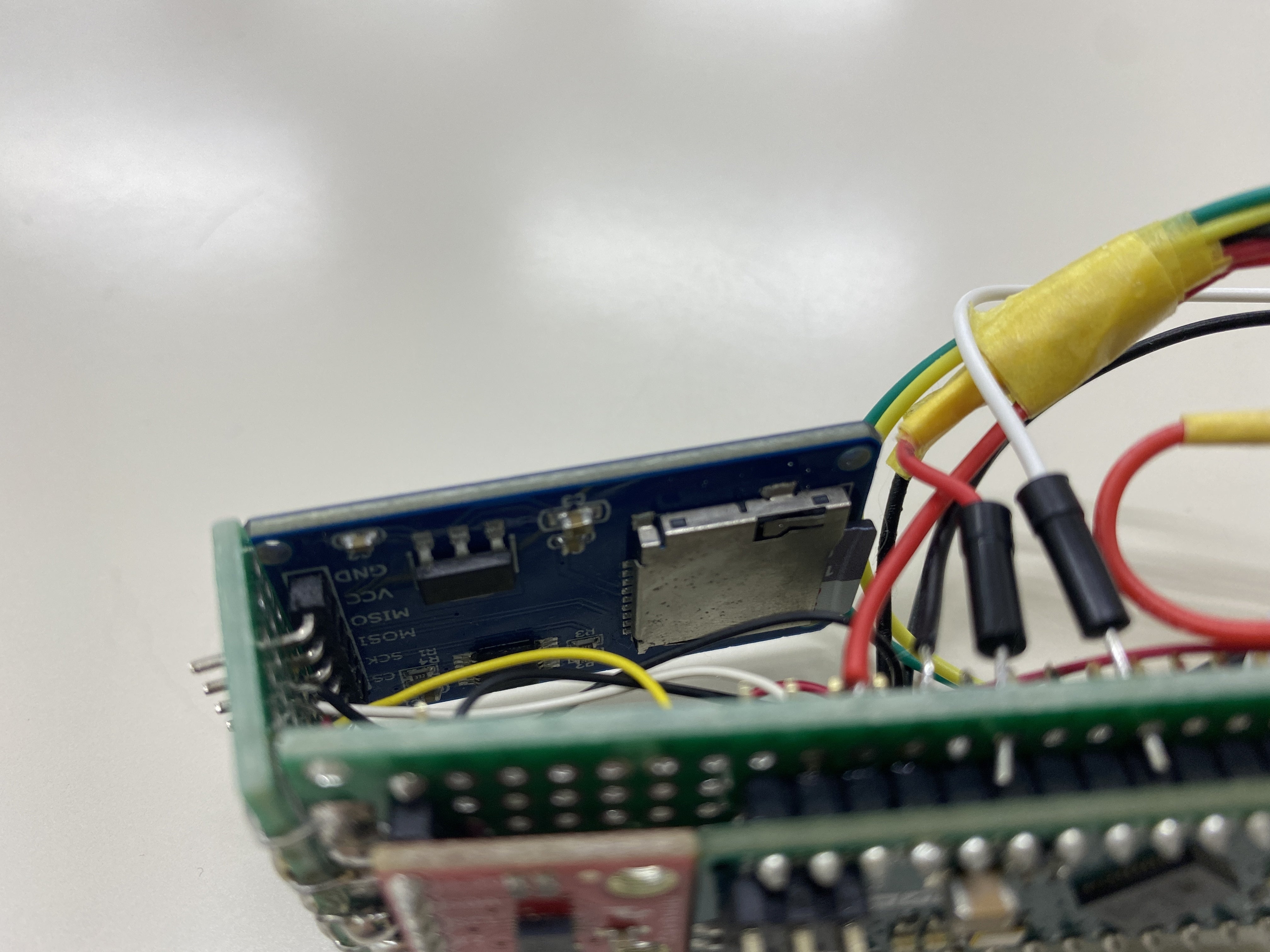
奥の青い基板がSDカードモジュールです。コンピュータから送られてきたGPS情報や加速度情報をテキストファイルでSDカードに保存します。
いかがでしたか?
2年近く続いたこのプロジェクトですが、コロナでの休止期間を乗り越えて残すは打ち上げ本番のみとなりました。これもひとえにパトロンの皆様の支えの賜物です!
打ち上げ日が晴れて風が出ないことを祈るばかりです。。。






