




皆さんはじめまして。インターステラテクノロジズ(以下、IST)で、観測ロケットMOMOのプロジェクトマネージャーを務めています、堀尾宗平です。
これから数回にわたって、今回のTENGAロケットの技術部分をお話できたらと思っています。どうぞ、よろしくお願いします!
僕たちは、北海道の大樹町という十勝の町で、ロケットを開発・製造・打上げ運用をしています。これまで、ロケットは国主導で開発されていたので、高く、時間がかかるものでしたが、僕たちは民間企業。工夫を重ね、低価格のロケットを実現させました。2019年には国内で初めて、民間企業単独での宇宙空間到達も達成しています!
今回のTENGAロケットでは、3つのミッションがあります。
1.応援してくれる方々の思いや願いを集め、寄せ書きを作り、それをTENGA型メッセージPODに入れてロケットから宇宙へ放出します。
2.宇宙仕様のTENGAロボがロケットから宇宙へ飛び出し、地球への帰還を目指します。
3.データ計測用TENGAを搭載し、宇宙空間でのTENGAの状態を計測します。
これらのチャレンジは、TENGAさんにとってはもちろんのこと、僕たちISTにとっても大きな技術的チャレンジとなります。今回は、ミッション1「メッセージPODの放出」を実現させるために、どんな試行錯誤をしたのか、また、技術的にどんな価値があるのかをご説明したいと思います。
技術チャレンジ:「ロケットから放出」を実現する
もう少し、ロケットから宇宙空間で何かを放出することについて掘り下げたいと思います。
そもそも観測ロケットMOMOは、地上から約120秒間エンジンを燃焼させ加速する期間を経て、高度100kmまで上昇したあと、微小重力状態を経て海に着水するロケットです。エンジンが停止してから高度100kmに到達し、さらには高度40kmまで落ちていく間の約240秒間が微小重力空間で様々な実験や測定が可能となります。
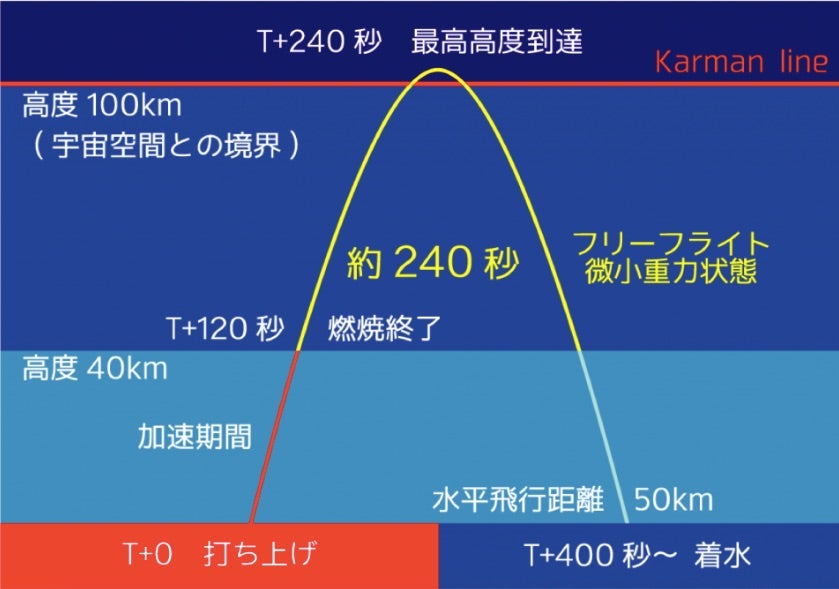
この図の高度100kmを超えたところが宇宙空間。
そこで、ロケットからメッセージPODを宇宙空間に放出します。
どうやって放出する?
実は過去にも、ペイターズドリーム MOMO4号機で、宇宙空間から折り紙飛行機を飛ばすプロジェクトにも挑戦しました。その時は、独自の放出機構を作り、ロケットに穴を開け、宇宙空間に到達したら地上から無線で信号を送り放出するような仕組みでしたが、ペイターズドリーム MOMO4号機は惜しくも宇宙空間に到達せず…。
TENGAロケットでは、ペイターズドリーム MOMO4号機の経験をもとに、TENGAメッセージPOD用の独自の仕組みが使われています!
今回の放出機構はこちら!
黒い台の上に乗っているものが、放出機構です。全長約49cm、重さ約700gほど。

この写真の左側の筒の部分に、メッセージPODが入っています。右側の細い棒(シリンダー)が伸び、蓋が開き、メッセージPODを押し出す形で宇宙空間に放出します。
 振動試験の様子を見守るTENGA代表松本
振動試験の様子を見守るTENGA代表松本
ペイターズドリーム MOMO4号機の仕組みを元に作ってはいますが、放出するものが直径約2.5cm程度から3.8cm程度に大きくなりました。大きくなることで、いくつか技術的な懸念要素が上がります。
1つ目、「大きさと重さ」
通常の打上げには搭載されていない放出機構を搭載します。放出機構を搭載するスペースと重量にはかなり厳しい制限がありました。今回はロケットの先端(フェアリング)とヘリウムボンベの間のわずかな隙間に配置しています。しかも、ペイターズドリーム MOMO4号機よりも大きなサイズのため、制限はさらに厳しいです...!
その中に、上下に開閉する蓋がついた放出機構を設置しています。重量の制限もあるため、「蓋」や、「PODを放出するための棒」には空気の力で動く部品を使用しています。
 これはイメージ図です。
これはイメージ図です。
赤い部分がメッセージPODで、その下にある半田円形のプレートが蓋です。
2つ目、「強度を保つ」
ロケットの外側はCFRP(炭素繊維強化プラスチック)という軽くて丈夫な材料で作られています。今回は、PODをロケットの外に放出するため、ロケットに直径3.8ⅽm以上の穴をあ開けています。穴が開いていてもロケットが飛行中に壊れないようにしなければなりません。ロケットにたくさん穴を開けるとその部分が弱点となってしまいます。直径約4ⅽmの穴はMOMOにとっては大変大きい穴です。振動、風、異物混入などのリスクが増えます。また、ロケットの強度を保つために様々な工夫も必要です。例えば外側のCFRPを厚くすると、ロケット自体が重くなりすぎて、最悪飛ばないことも...。今回はTENGA様と相談を重ねて、PODのサイズや穴のサイズを決定しました。ロケットが壊れないように、かつメッセージPODが通れるギリギリの大きさが、直径3.8ⅽmになったのです。
3つ目、「確実に放出する」
メッセージPODが途中で引っかからず、確実に宇宙空間に放出できるようにしなくてはいけません。ペイターズドリーム MOMO4号機の折り紙飛行機と違うところは、ロケットの強度も考慮して、メッセージPODが通れる大きさギリギリで作っているということです。PODを外に押し出す棒も、ロケットの外まで確実に押し出す長さが必要になります。ロケット飛行中の厳しい環境でも、蓋が確実に開閉するか、棒が動くかを入念に考慮する必要がありました。
以上3点を配慮しながら、放出機構の設計をしたのは少数精鋭のメカトロニクスチームです。大樹町にある本社の僕とメカトロニクスチームがいる東京支社とで密にコミュニケーションを取りながら、設計や開発が行われました。
設計や製造を終えた後は、本番を想定した試験を念入りに行いました。打上げと同じ環境で放出機構は動くのか?勝手に蓋が開いてしまわないか?しっかり放出できるのか?を実際に確認します。今回はNASA Workmanship Standards Programに準拠した条件と、MOMO4号機までに取得した実際の打上げ時の振動環境を模擬した条件で試験を実施しました。
 まだ中身が入っていないものでテスト。
まだ中身が入っていないものでテスト。 試験結果の一部。
試験結果の一部。
試験結果は大成功!本当は動画で試験成功の様子をお見せしたかったのですが、それは本番にとっておきましょう。あとは打上げを待つのみです。
放出の仕組みがISTとしても嬉しい理由
MOMOは、打上げの間ずっと無線でやり取りしています。打上げデータの取得や、様々なロケットへのコマンド(緊急停止などの指令)も全て無線です。TENGA計測データも無線で取得します。しかし、無線でやり取りできる量には限りがあり、実際はロケットの飛行に関するやり取りでそのほとんどを使用します。残りの中で、ISTの新規開発に必要なデータを取得したり、今回のようなミッションを実施しています。たとえば今後、ロケット内にデータを記録させて、打ち上げた後にそのデータを回収することができれば、無線の制限によらず、お客様ができることも増えます(TENGA計測データをたくさん取るなど)。それは、お客様にとってもISTにとっても嬉しいことです。
また、ISTは、観測ロケットMOMOだけではなく、超小型衛星を打ち上げるためのZEROというロケットの開発を進めています。超小型衛星は、地球の周りにある軌道に衛星を投入しなければならないため、「ロケットから衛星を放出する」という機能が必要となります。今回のミッションは、ISTにとっても大きな挑戦であり、必要なステップなのです。
まとめ
このようにひとつのミッションに対して、様々なことを考慮し、入念な試験を実施して、着々と準備を進めています。TENGA様やみなさまの思いを宇宙に届けるために、ISTの新たな技術の獲得のために、引き続き打上でまで全力を尽くしていきます!
ロボの帰還やTENGA開発のデータ計測に関するミッショについてはまたお話しさせてください!





