




 LINEで送る
LINEで送る<概要>
2020年8月に、NASAによって火星探査にUAV(Mars helicopter)を用いる実験が行われます(MARS2020: https://mars.nasa.gov/mars2020/)。現在の火星探査はローバーによる狭い範囲を密に調査する探査や、人工衛星による広い範囲からのアバウトな探査が主流です。火星の全容をつかむには、人工衛星よりも詳しく、ローバーよりも広範囲な探査の実施が必要と考えました。私たちがこれまでに参加した学会や調査では、火星で十分な飛行ができる機体はまだ開発段階だということがわかっています。しかし今後、十分に飛行できる機体が開発される可能性は高く、実現すれば火星の解明が大きく発展すると考えられています。これを受け、私たちは、今後発展すると見られるUAVによる火星探査において、機体自体の開発ではなく、UAVに様々な機器を搭載しサンプル採取や分析、大気観測を目指します。ここで必要とされる技術は、火星探査のみならず、地球上でも多くの需要があると考えており、山岳での運用や、鉱山、農業分野での活躍が期待できます。地球上での応用に関しても、今後実証実験を行なっていきます。
<これまでの活動・実績>
機体の開発
この研究において、実験に必要な様々な機器を搭載するので市販品のドローンが使用できず、私たちは機体を1から開発しました。

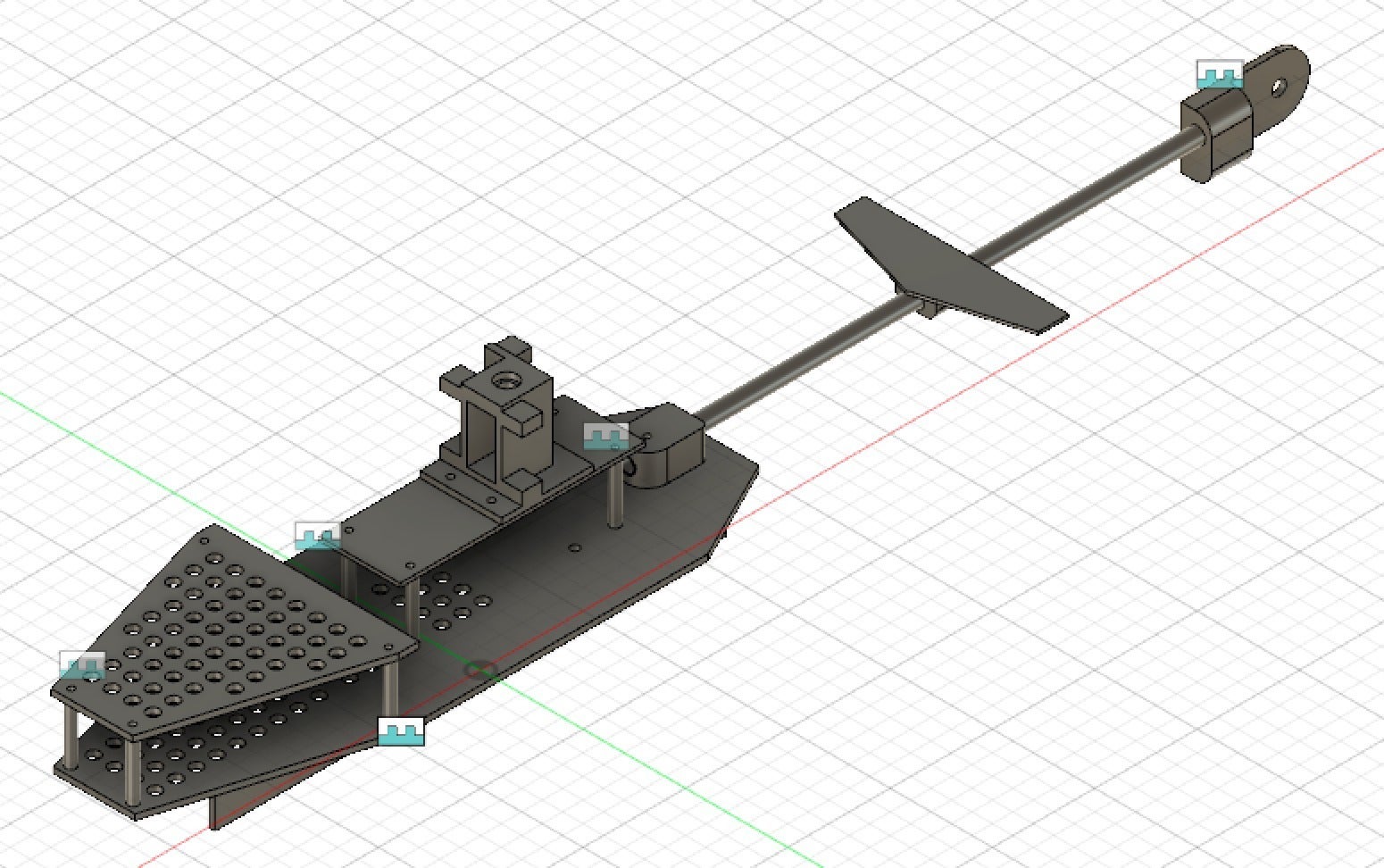
機体フレームの設計
<機体データ>
全長:700mm
全備重量:990g
飛行時間:7分
搭載機器:GPS、IMU、磁気コンパス、気圧センサ
<開発の様子>
火星を想定した環境や、地球上での過酷な環境に対応するために、できるだけ構造を簡単にし、実用的な機体にする必要があり、様々な機構を新規開発しました。
その一つが機体の制御を行う回転翼機構の簡略化です。可動部分に複合材料を使用することで、極限まで関節を省略し、信頼性と整備性を向上させました。

その他にも、飛行性能と実用性を考慮し、プロトタイプを完成させました。

その後、大型化、高出力化、制御装置などに改良を経て、実際に実験に使える機体を完成させることができました。
屋外飛行試験(地球での応用)
概要でも述べたとおり、これらの技術は火星探査のみならず、地球上での需要も高く今後、活躍することが期待されます。そこで、基本的な機体の性能や実用性を確かめるために、屋外にて飛行試験を行いました。

実際に、小型カメラを機体にとりつけ、高度20m付近まで上昇させ操作性や制御装置が問題なく作動するかを確認しました。

今後、山岳などより過酷な状況での試験を繰り返し、より実用的なものにしたいと考えています。
砂サンプル回収実験(火星での利用)
まず私たちはサンプル採取機構に着目し、非接触でサンプル採取を行うことを目的とした機構を実際に機体に搭載し、火星の模擬土壌(参考:https://www.themartiangarden.com/)を用いて実証実験を行いました。
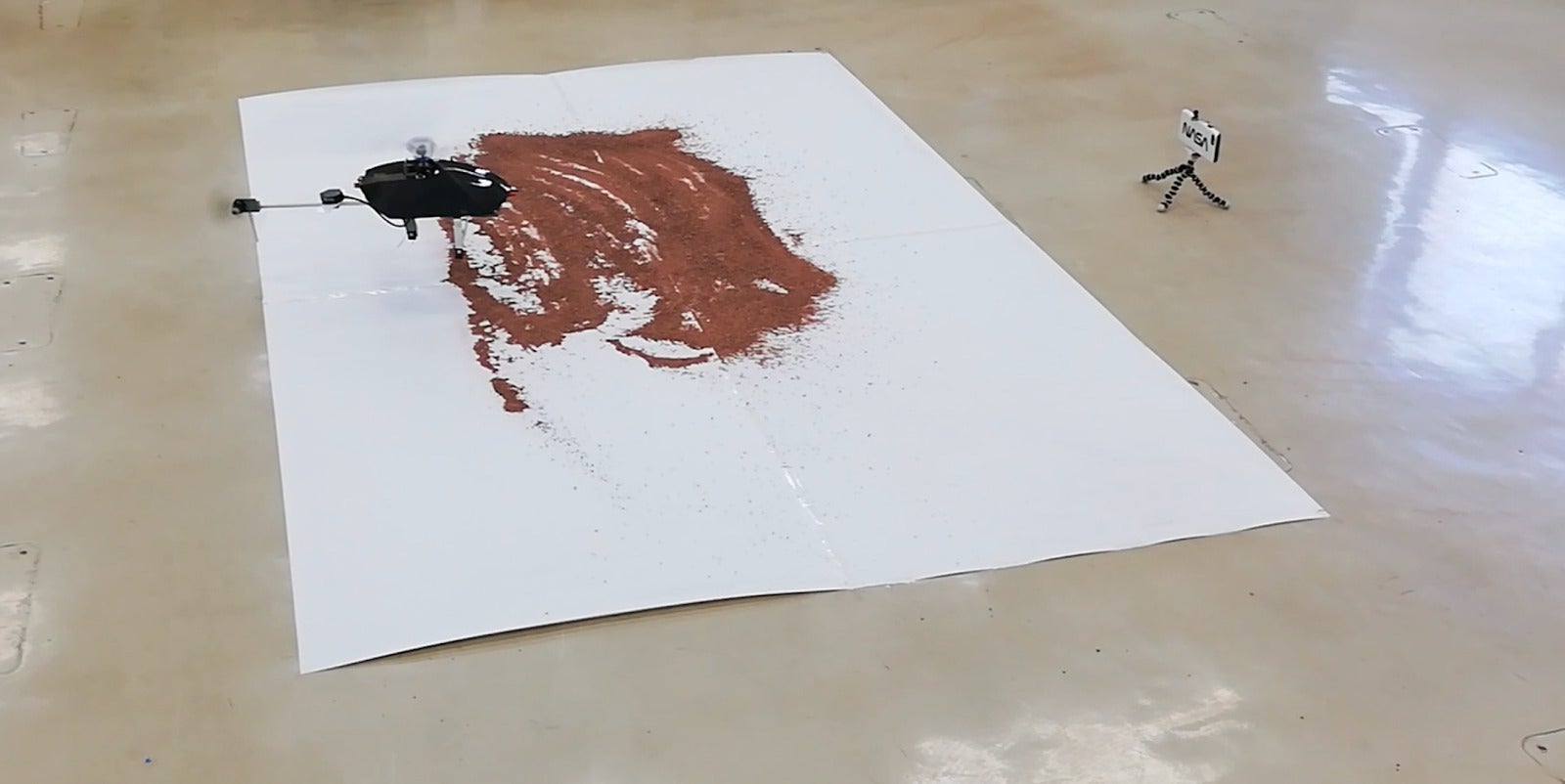
結果は、非接触でのサンプル採取では微小量できたが、回収量が足りないので、今後は接触型(タッチダウン)でのサンプル採取機構を開発しようと考えています。
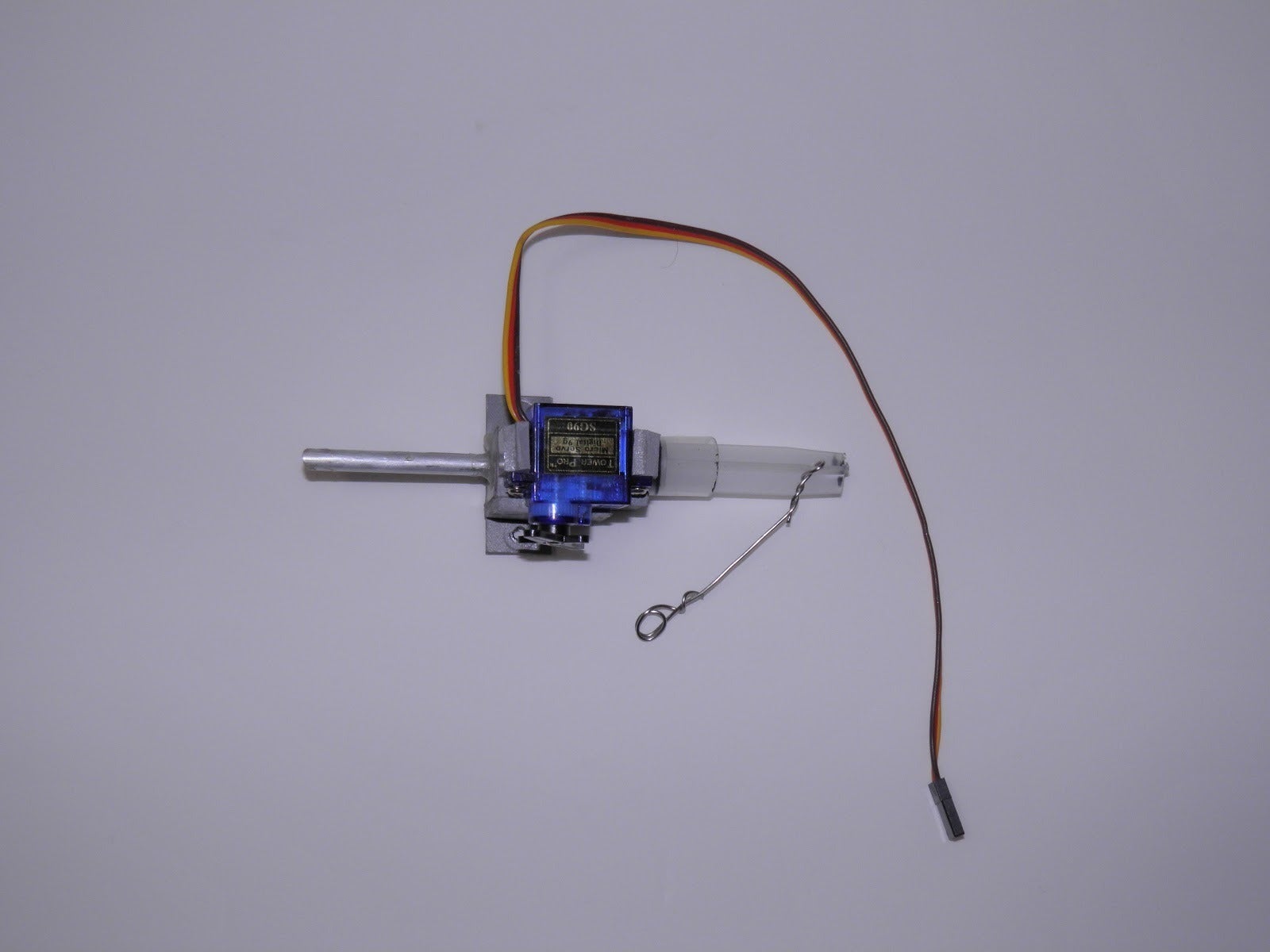
今回しようしたサンプル採取機構
<情報収集>
火星探査UAVについて調査するために、私たちはAIAA(アメリカ航空宇宙学会)主催の航空宇宙分野における国際学会「SciTech Forum 2020」及び、フランスで開かれた「 Paris Space Week 2020」に参加しました。また、日本では東北大学流体科学研究所主催の「第2回火星ヘリコプター研究会」に参加しました。これらの学会及びシンポジウムに参加し、現時点での火星探査UAVの研究は、基礎研究の段階にあり、固定翼型のUAVや、同軸反転ローター型のUAVといった探査機が考案されていることを知りました。しかし、その火星探査UAVの活用法は考案されておらず私たちはそこに着目するに至りました。
<今後の研究予定>
Visual-SLAMの実装 (2020年3月までに行う予定)
Visual-SLAMとは、搭載カメラの映像を用いて、移動体の自己位置推定と環境地図作成を同時に行う技術のことです。これにより探査地の環境地図を作成し、タッチダウン地点を把握します。
Go-proの実装 (2020年4月までに行う予定)
Go-proにより撮影された画像データをもとに3Dマップを作成します。
Visual-SLAM及びGo-proの実証試験(2020年6月末までに行う予定)
実装し終えたVisual-SLAM及びGo-proを用いて機体をフィールドで飛ばすを試験します。そこで得られたデータをもとに3Dマッピングや自己位置推定を行い、試行錯誤を繰り返す予定です。
タッチダウンによる砂サンプル採取機構の開発・製作(2020年8月末までに行う予定)
UAVによりタッチダウンを行うことで砂サンプル採取を目指します。新しい機構を開発し、3Dプリンターで製作する予定であり、さらにサンプル採取機構そのものにサンプル解析を行うセンサーを取り付けることでデータも取る予定です。具体的には、光線を用いたセンサー類、分光器を考えております。
ガスサンプル採取機構の開発・製作(2020年9月末までに行う予定)
ガスサンプルを回収する機構を開発、製作しその場でガスセンサなどを用いた解析を行わせます。
実証実験
*試験場所は今現在での予定です
試験場所① 筑波大学
試験場所② 筑波山
試験場所③ 千葉県の国土交通省から認定を受けたラジコン飛行場
<資金の使い道>
・新機体の製作
Flight Controller
部品の造形
ブレードなど
計5万円
・搭載機器
Intel RealSence Tracking Camera T265
Raspberry Pi 3 B+
Go-Pro
その他センサー類(SHT31 湿度センサーなど)
計8万円
・実験材料
The Martian Garden提供の火星模擬土壌(MMS-2)
各種機器
計3万円
・実証実験費用
試験場利用費など
計4万円
合計20万円
本プロジェクトはAll-in方式で実施します。目標金額に満たない場合も、計画を実行し、リターンをお届けします。
最新の活動報告
もっと見る
2020年活動内容一覧
2020/12/28 13:012020年研究経過報告書阿依ダニシ堀井樹本研究の経緯について本研究はもともと阿依ダニシ及び堀井樹によって別研究として別れていたものが合併し、行われたものである。まず阿依ダニシは元の研究において、火星探査におけるセンシングシステムの効率化を題目にし、主にセンサー系また、その統合利用による火星探査を研究していた。一方堀井はヘリ型UAV本体の開発を題目とし、シングルローター式の利点をいかした農業や過酷な環境でのUAV運用を研究していた。2020年2月より本格的にUAVを用いた火星探査を研究題目として扱うようになる。すでに各々が研究していた内容を統合することで火星の探査を発展させ、その過程で開発された機体は地球上での運用においても大いに活躍を期待できるものと考えた。以下2020年2月より新体制で行われたこの研究における実績を紹介する。 日付 タイトル 内容 2020/1 •AIAA Scitech Forum 2020 アメリカ航空宇宙学会における最大級の発表会にて、最新の航空機研究や火星探査UAVの研究を調査 2020/2 •火星砂サンプル採取試験 当初の目的である砂サンプル採取の実証試験を実施 実際にヘリに開発した採取機構を搭載し、試験した。 2020/2 •第2回火星ヘリコプター研究会 東北大学で開かれた第2回火星ヘリコプター研究会に参加 日本における最新の火星ヘリ関係研究を調査 2020/2 •Campfireスタート 資金調達のためクラウドファンディングを発足。 2020/2 •Paris Space Week 2020 フランスのパリで開かれた国際学会に参加し、ベンチャー企業ベースでのヨーロッパ圏宇宙開発を調査 2020/3 ・Intel real sense t265 導入 Intel real sense t265 を試験的に利用 将来的なVSLAMのための技術勉強 2020/3 部屋での簡易的マッピング試験の実施 部屋や屋内での簡易的飛行などによりマッピングを試すが、結局すべて失敗に終わる(試験回数のべ50回以上) 2020/4 マッピング成功 4月上旬、マッピング用の飛行方法を確立 ようやく野外での試験ができ、マッピング技術も確立する 2020/4 2機目 オリンポスの完成 搭載機器及び、ヘリの使用頻度から2機目の開発を決定 より大型でパワーアップした機体「オリンポスが完成」 2020/4 本格的マッピング実験開始 ヘリの飛行安定性を実証後、本格的に火星マッピングに向けた試験を開始 50回以上のマッピングを行う 2020/5 マッピングの完成 第64回宇宙科学技術連合講演会向けの論文作成 マッピング技術を確立し、多くの結果をもとに分析 第64回宇宙科学技術連合講演会に向けた論文執筆 2020/6 揚力測定装置完成 今後の機体開発及び、火星での飛行に向けた実験のために揚力測定装置を開発、製作して完成 2020/6 揚力測定実験 マウントを完成させ、実際に実験を行った 2020/6 新しいクラウドファンディングacademist発足 academistにより、30万の資金調達に成功した。 2020/7 3機目「マーリン」完成 マッピングにより飛行回数が多くなりすぎた「オリンポス」とともに2台体制を整えるべく「マーリン」を開発 2020/7 Raspberry pi 無線通信 ここまで実験及び機体開発の裏腹、Real sense などのセンサーを搭載したモジュールをヘリに搭載するべく、マイコン開発をやってきた Raspberry pi で無線通信を確立、センシングシステム確立。 2020/7 機体部品開発 企業と協力し機体部品を開発 2020/7 山口県秋吉台第1回試験 山口県秋吉台にてマッピング及びセンシングの第1回試験を実施 2020/8 Raspberry pi システム完成 秋吉台での実験で失敗に終わったRaspberry pi のセンシングシステムを再度開発し、実証実験を行って完成させる 2020/8 山口県秋吉台実験第2回 第1回に次いで、三次元測量と自己位置推定、探査プローブ投下の実験を行った。探査プローブは、ドリーネ(縦穴)の温度などの気象条件の観測に成功した。 2020/9 新3Dプリンター導入 今後のため3Dプリンターを新調した 2020/9 秋吉台でのデータ分析 夏に行った実験の結果をまとめ、「第64回宇宙科学技術連合講演会」にて発表を行った。 2020/10 揚力測定実験 実験室にて揚力測定実験を行った。 2020/10 第64回宇宙科学技術連合講演会 オンラインで実施された今回の宇宙科学技術連合講演会にて発表 2020/10 揚力実験ひと段落 揚力実験のデータも集まり、CFD解析も行った 2020/11 AIAA Student conference 2020 への論文執筆 国際学会であるAIAA Student conference 2020への論文を執筆 2020/11 ABlab などのコミュニティに参加 様々な宇宙関連のコミュニティに参加し、多くの情報を入手し、今後の方針を考える 2020/11 AIAA Region Ⅶ student Sydney conference 国際学会であるAIAA Region Ⅶ student Sydney conferenceにて学会発表 2020/12 Cansat モデル開発 投下用のCansat モデルの開発開始 2020/12 小型ローバー2輪 4輪完成 2輪「Phobos Ⅱ」及び4輪「ExplorerⅠ」に完成 二輪超小型ローバー(CanSat) [PhobosⅡ] ウェラブルカメラを搭載し、遠隔操作にてコントロールする。 四輪小型ローバー [ExplorerⅠ] 前輪ステアリング方式の四輪ローバーで、自己位置推定システムを搭載。以後、自動運転システムを搭載予定。 2020/12 第1回砂地試験 ヘリやCansatの試験のために、福島県四倉海岸での試験を実施 無人ヘリのデータもとに、ローバーを支援する。 まとめ本研究は当初の2月の予定より大幅に進捗を生み出し、多くの実績を残してきていると私たちは実感しています。驚くほどの機会に恵まれ今年1年でかなりの成長を遂げました。なおここまでクラウドファンディングとしてCampfire及びAcademistを活用し多くの方に支援していただきました。本当にありがとうございます。当初の予定であったリターンを十分に提供できず申し訳ございませんでした。実際のところコロナで影響を受けて研究が滞っていたことは全くなく、むしろ活動量が爆発的になってしまったため、ご報告が遅れる結果となりました。この書類をもって2020年の報告書関連リターンは以上とさせていただきます。今後はさらにクラウドファンディングを設立し、資金のご協力をお願いするとともに、2021年初頭での起業を目指しております。皆様のご支援で私たちはここまで来ることができました、またご協力いただけると幸いです。 もっと見る
砂浜試験報告書
2020/12/28 12:33こちらの活動報告は支援者限定の公開です。
2020/12/01までのYoutube投稿一覧
2020/12/01 02:40ここまでどういった動画をYoutubeに投稿してきたのか、まとめさせていただきます。実際に動画の方が伝わりやすいと思うので見ていただけると幸いです。また、この研究の一員である阿依ダニシはクマ財団の4期生に選ばれているので、是非ご確認ください。Fly Helicopter on Mars 2020/03/06クラウドファンディング用に作成した動画で、機体も初号機の「コルセア」です!ヘリUAVを用いた3Dマッピング試験 2020/04/133次元測量の技術をようやく確立し、火星探査用の手法を編み出した時の動画ですProject of UAV helicopter on Mars and Earth. 2020/04/19新機体での本格的試験を開始し、3次元測量の試験を開始していく段階の動画ですProject of UAV helicopter on Earth and Mars!! 2020/04/24新機体にさらに改良を加え、実際にどのような応用可能性があるか検討している動画です超多目的小型無人ヘリを開発したい!! 2020/04/30上の動画とほぼ同じ内容の動画です火星探査UAVを開発したい!! 2020/07/04実際に自分たちがここまで成し遂げた実績を詳細に解説した動画です火星探査UAVの研究活動報告(part1) 2020/07/07定期的な活動報告を目指して作成した、作業風景のような動画です残念ながら、この後にやってくる山口県での実証試験などの期限要求に間に合わせるために活動を始めなければならなくなり、定期的に動画を出すことは厳しくなってしまいましたUAVによるたて穴進入簡易実験 2020/7/16山口県での秋吉台カルスト実験のことを考慮し、縦穴に入った場合どのようにダウンウォッシュの影響を受けるのか簡易試験し、動画にしました空撮実験映像1 2020/7/17ヘリ搭載カメラをGo-Pro Hero8に切り替えたのでその風景を動画にしていますRaspberry pi remote desktop set up (ラズパイでリモートデスクトップ設定:NoMachine) 2020/7/17第1回山口県試験に向けてラズパイの遠隔操作を初めて検討した時のやり方を動画にしました(結局正攻法ではなく失敗してしまいました)Raspberry Pi 3 model B 初期セットアップ方法 2020/8/21ラズパイのセットアップを簡単に解説した動画ですこれ以降、さらに実験や学会の要求が増え、動画を作る余裕がなくなったしまいましたが、また、多くの成果を上げたので今後動画をそれぞれ要素ごとに分けて作成し、投稿していきたいと思います もっと見る








コメント
もっと見る