MOBILE WEARの姿
2022/02/14 01:42

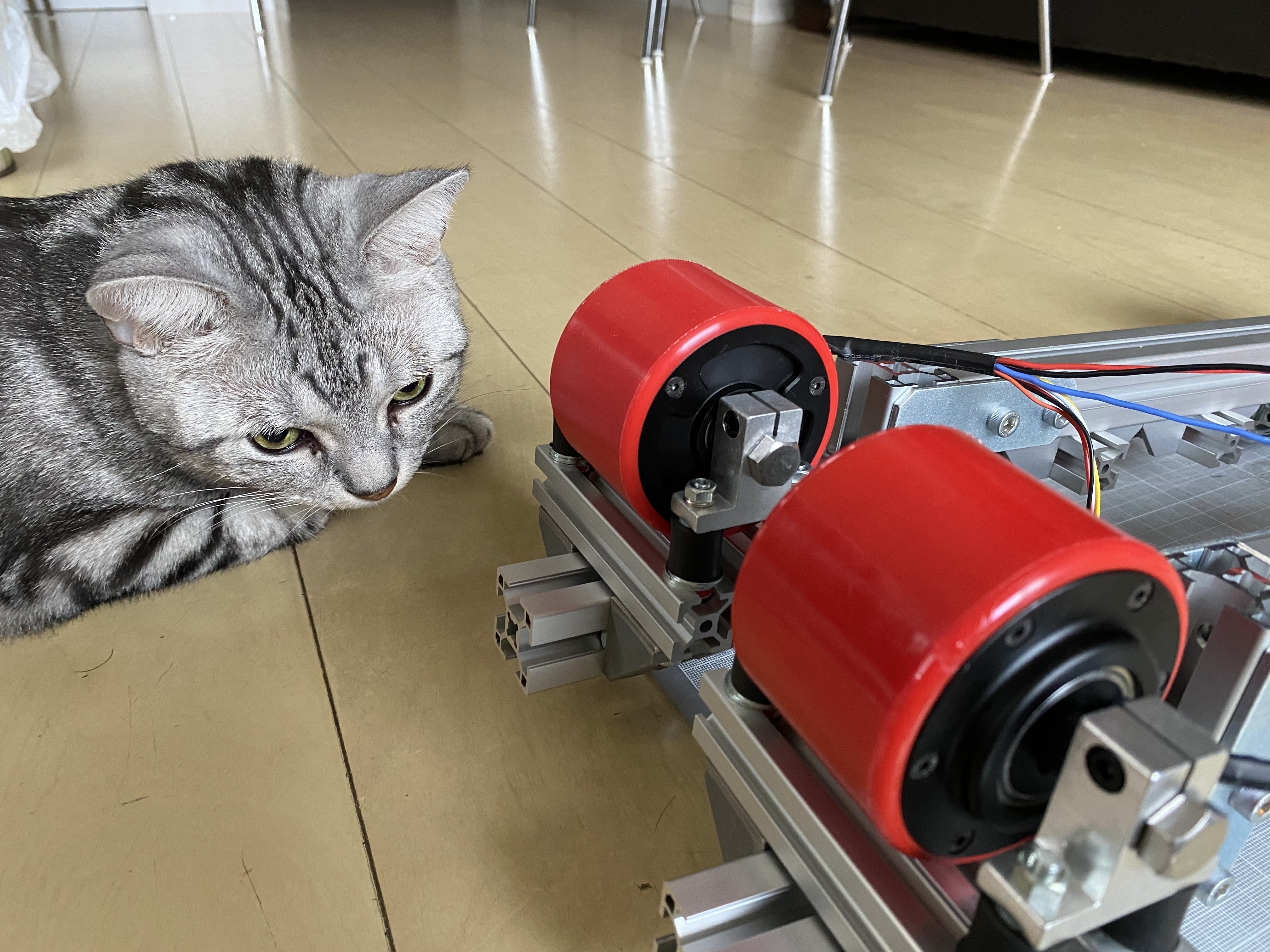
MOBILE WEARは今のところ上図の様な外観なので、ロボット的に捉える方が多い様です。MOBILE WEARは服を着る様な気軽さで使える超個人的な移動手段を目指していて、その姿は今後どんどん変化していくことでしょう。今回のクラウドファンディングでは資金面の支援をお願いしていますが、技術的な面をはじめ、外観意匠や 世の中でどの様に使われていくべきか などを検討し実現していくことに対する幅広い領域の支援もお願いしたいと考えています。ちょっとしたご意見、ツッコミ程度でもいただけると大変ありがたいです。今後もMOBILE WEARの開発へのご協力をよろしくお願いします。