
日本の公式コートでの最後の調整
6月22日 滋賀県にある立命館守山中学・高等学校で「リツモリカップ」が開催されました。この大会は選手同士の技術交流などを目的として定期的に開催されており、昨年度は3回参加させていただきました。私たちチームにとって日本の公式大会で使用されるコートで調整を行えるのはこれが最後のチャンスとなるため、はるばる東京、福岡から訪れて参加しました。

1試合目からロボットの調整に苦戦
限られた調整時間の中で大会会場のコートの色やボールの色など、ロボットにセッティングする作業に時間がかかり、あまり調整できてない中、安定的な動きの相手チームに点数を決められ負けてしまいました(世界大会では前日1日が調整日となっています)。
新しい機能が活躍した2試合目
2試合目では、昨年の世界大会で優勝した日本のチーム「Crescent(Re)」と対戦しました。1試合目から十分時間がたっていたことから、十分に調整した状態で臨みました。前半、相手のテクニカルで隙の無い動きになかなか対抗できず点数を決められてしまいました。
「ゴールを向いてシュート!」得点力を上げる戦法でゴールを奪う!
後半、最初は圧倒的な強さを見せる相手に点数を決められながらも、途中でボールを奪い返しゴールを決めました。

↑相手ロボットからボールを奪いゴール(左)へ向かう様子
そして、試合の一番最後に、この日、動作を確認するために用意したプログラムが機能しました。関東大会、日本大会と実現しようと調整してきたが実装できなかったプログラム「ゴールを認識してシュートするプログラム」です。
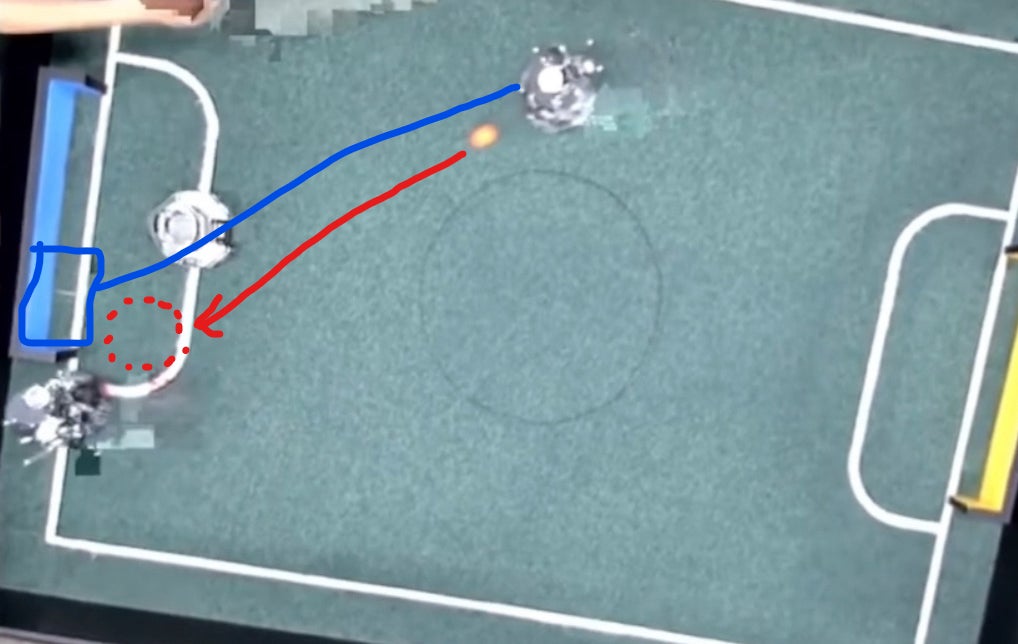
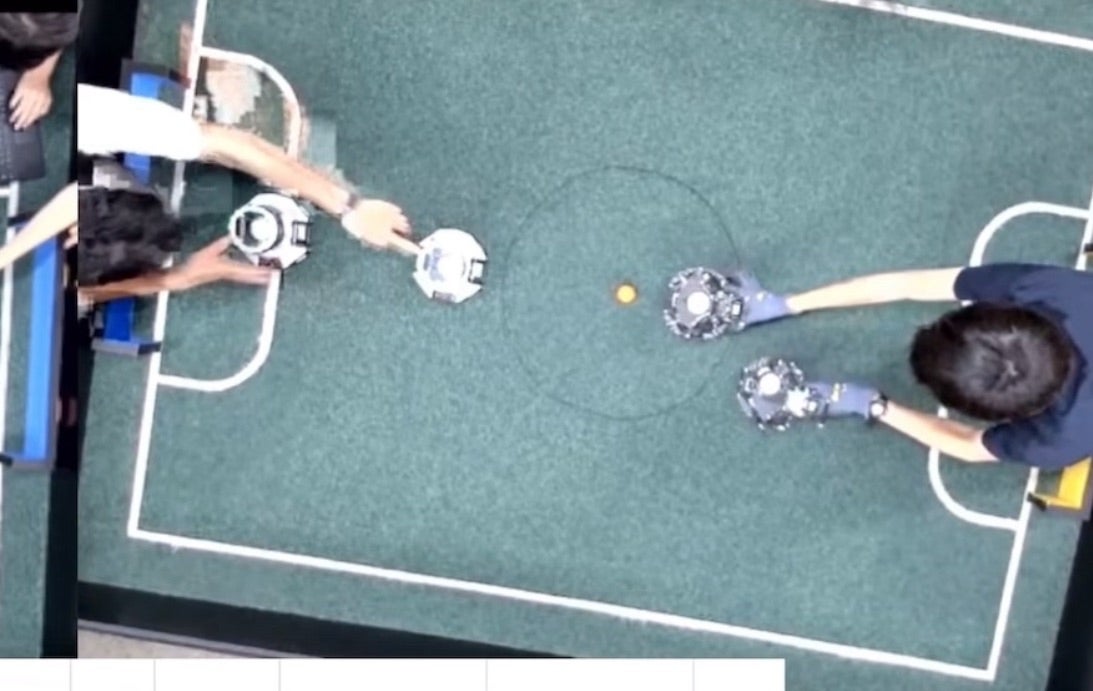
上の画像は、試合開始直後、互いのロボットがオレンジ色のボールめがけて突進した後、ボールは右に転がり、そのボールを奪ってロボットがゴールの左端の空きスペースを認識して、そこにめがけてキックしている様子です。

キックしたボールはゴールに入らず、壁に当たってしまいましたが、再びそのボールをゴールに向けてキックしてゴールをきめました。
ただ一定方向を向いてボールに突進する方法ではゴールを決めることはできなかったこの場面、ゴールの場所を知ることが、点数を決めるうえでどれほど重要なのか知る一場面となりました。
プレゼンで交流
この大会で試合以外に行われるのがプレゼン会です。この大会に参加する際はほぼプレゼンを行っています。今回は、私たちのチームの1つの特徴である遠距離開発、そして私たちのチームが新たに取り組んだカメラの景色からコートの形状を把握する手法、ワイヤレスでデバッグを行うシステムについて紹介しました。
今大会の反省
今回の大会では、ロボットの調整の部分で課題が浮き彫りとなりました。チームメンバーの人数が少ない中で、いかに役割分担して、その会場に適合した状態に仕上げるかというのが、試合を有利に進めるための鍵となると思います。世界大会では、互いに事前に調整すべき項目を挙げ、チャックリストのようにし、互いに効率よく調整が進むよう役割分担を行おうと思います。
そしてプログラムの面では、ゴールを認識するプログラムがうまく動作していることを確認できました。その一方で、ボールが見えなくなった時の動きや、ロボットのコート上での役割分担(1機が攻撃にまわり、1機が守備にまわるなど)のプログラムの詰めが甘いことが浮き彫りとなりました。出発までの2、3週間、おもにその点に重点を置き、調整を進めようと思っています。
世界大会まで残り2、3週間、そして最後のロボカップジュニアの選手としての時間を大切にしていきながら、精一杯頑張りたいと思います。応援よろしくお願いいたします!








