

双子のロボットチームで世界大会に挑む!
ご覧いただきありがとうございます。私たちは双子でチームを組みRoboCupJuniorというロボット競技大会に出場しています。約1年間かけてロボットを製作し、ブロック大会、全国大会を経て、この度、7月にブラジルで行われるRoboCup2025に日本代表チームとして選出され出場することになりました!
世界大会では1位を目指して全力で1戦1戦に挑んでいくとともに、世界の若き技術者の方々と交流し、新たな知見や学びを得たいと思っております。
しかし舞台はブラジル!日本から見て地球の裏側です。この世界大会出場のための資金を集めるためクラウドファンディングを開設しました。

RoboCupとは?
RoboCupとは2050年までにサッカーで人間に勝てるロボットチームを作ることを目標に掲げた国際的なロボット競技大会です。私たちはその中でも19歳以下の部門「RoboCupJunior」に出場しています。
競技について
私たちは「RoboCupJunior」の中でもオレンジ色のゴルフボールを2台の自律型ロボットで探索、追跡し、相手のゴールにシュートを決めると点数がもらえる競技で、制限時間内に最も点数が高かったチームが勝利となります。この競技での特徴は、スタートボタンを押してから選手はロボットに触れてはいけない、操作してはいけないという点です。つまりロボットが自分でボールを探しボールを見つけ、自動でボールを追跡する必要があります。下の写真は、全国大会での試合の様子です。
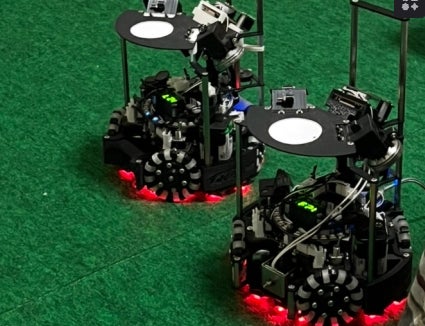
ロボットについて
ロボットは、選手によって設計からプログラムまですべて行われます。


サッカー競技内で最多受賞!3つの賞を受賞!
全国大会では直前まで作りこんだプログラムの調整に苦戦し、試合結果6位と悔しい結果となりましたが、掲示が求められるロボットの詳細情報や工夫点などを記載するポスターで競技内で最高評価をいただき「優秀プレゼンテーション賞」、また、私たちのロボットの特徴でもあるロボットの周囲を探索する新しいデバイスの開発、そして様々な工夫を凝らしたロボット開発について高い評価をいただき「ヤマザキマザック賞(スポンサー賞)」、「審査員特別賞」を受賞しました。


舞台はブラジル!世界大会へ
私たちはロボカップジュニアという大会のSoccer Openという競技で、日本代表とチームとして7月15日~21日、ブラジル Salvadorで開催されるRoboCup 2025 Salvadorという大会に出場します!
奇跡的に手に入れた世界大会への切符!
全国大会では競技順位6位(世界大会推薦順位5位)と世界大会へ進めるかは絶望的状況でした。しかし、上位チームで世界大会の出場を辞退したチームが出たことにより世界大会への出場権を獲得しました。このような形ではありますが、正式に日本代表チームとして世界大会への切符を手に入れました!

目指すは優勝!だけじゃない!!
世界大会では十分な準備を行い、優勝を目指して、当日最高のパフォーマンスが発揮できるよう努力するとともに、全国大会で見せた私たちの挑戦心を世界大会で披露し、プレゼンテーションや、技術的な賞の受賞も目指します!

「革新的なビジョンシステムを開発し実用化した」
全国大会で絶賛されたビジョンシステム
今シーズン、私たちはロボットの周囲を探索する新しい手法を提案しました!
ロボット上部に取り付けられた3つのカメラ。試合中や、ロボットの車検、インタビューの際には多くのスタッフや審判の方々の目を引きました。また、大会側からは「魚眼レンズを活用した革新的なビジョンシステムを開発し実用化した」とうれしいご好評をいただきました。

既存の手法
私たちの出ている競技でロボットの周囲を探索する手法として多くのチームが取り入れている方法が①円錐ミラーの下から1つのカメラで覗くことで円錐ミラーに映る周囲の景色から探索する手法と②4つのカメラでロボットの4方向をそれぞれのカメラで探索する手法です。前者の手法には精度のよい円錐ミラーを必要とし、後者の手法では4つのカメラを用いる分お金がかかること、4つのカメラからの情報を整理する手間がかかるという欠点があります。
手法①の失敗
当初の予定では、手法①によってロボットの周囲の探索を行う予定でしたが、広い範囲がくっきり見え、場所による色の変化が少ない精度の良いミラーの入手に苦戦しました。また、新しい場所でロボットの開発を行う私たちにとってミラーを自作するというのは厳しいことでした。
過去から得たヒント
これまで全国大会に出場したチームのロボットの詳細や技術について紹介されたポスターを、1チームずつ調べていったところ過去に魚眼レンズ1つを用いてロボットの周囲の状況を把握するということをしたチームがいることがわかりました。「魚眼レンズを使えば周囲を探索できるのではないか」という案が生まれ、新しい探索手法を考えることにしました。
3つのカメラと3つのレンズでロボットの周囲をカバー
3つのカメラと魚眼レンズ、広角レンズを用いて、各カメラの前にレンズを設けることでロボットの周囲を死角をほぼ無くした状態でボールの探索が行えることがわかりました。私たちはこれをロボットの上部に取り付け、プログラムを作成し、新しい探索手法を実用化しました。
新しいエネルギー「ニッケル亜鉛電池」の導入!
高い起電力と安全性
私たちの使用している電池の1本の公称電圧は1.6Vと、アルカリ電池1.5V、ニッケル水素電池1.2Vと比べ高く、実際にはそれ以上の電圧で使用できます。また、安全面でもリチウム系2次電池と比較すると安全性が高く、だれでも使いやすい2次電池であるという点が特徴です。
「あまりみたことない新しい技術に挑戦」と高く評価されたニッケル亜鉛電池の導入
良い点がたくさんあるニッケル亜鉛電池ですが、あまりロボカップジュニアでの実用例がないようです。以前、現役ではないチームでニッケル亜鉛電池を試しに使用されている前例を見て、私たちのロボットにぴったりな電池だと思いました。公式大会でほとんどのチームがリポバッテリーやアルカリ電池を使用する中、私たちはニッケル亜鉛電池を使用し、ロボカップジュニアでも十分に使えるということを示しました。
ワイヤレスでロボットの調整を行う独自システム
動作中のロボットからセンサの値を取得したい!
ロボットがボールを追跡中、誤作動したときにその原因をさぐるにはその時のロボットの状況を探ることが重要です。私たちのチームでは、ワイヤレスでロボットのモーターの出力や、センサの値、推測したボールの方向などを取得できるシステムの開発を行いました。ワイヤレス通信の部分には既製品の通信モジュールを使用して、ロボットの状況を映し出したり、ロボットに命令を送ったりする部分には自作のソフトウェアを導入しました。私たちのロボットに特化した独自のソフトウェアにより、スムーズな状況把握やロボットの調整につながりました。
↓独自開発のソフトウェアでロボットの状況を確認できます

↓独自開発なので、ロボットに合わせたパネルを用意できました



中野 湧 Yu Nakano
電気通信大学 情報理工学域I類 コンピュータサイエンスプログラム 2年
📍東京
プロジェクトマネージャー。ロボットの電気系統の整備およびプログラムの作成、ソフトウェアの作成を行っています!高校生の時からロボット製作やソフト開発などを行ってきました。これまでの経験が最大限生かせるように全力で最高のロボットに仕上げます!

中野 葉 Yo Nakano
九州大学 工学部 2年
📍福岡
ロボットの設計とプログラムの作成を担当しています!世界大会に通用する耐久性と整備性、そしてなんといってもかっこよさ!全てを備えた最強のモデリングを目指します!

1000km先のチームメイト
1000km離れたロボット開発なんて想像ができますか?私たちは今日にいたるまでロボット開発をお互いが1000km離れた福岡と東京を拠点として行ってきました。そんな遠距離開発を支えたのは近年話題のクラウド技術です。これによって、ロボットの3Dデータや、電子基板の概形、プログラムのソースコード、大会提出書類などのスムーズな共有、共同作業が実現できました。

これまでの歩みと最後の挑戦
もともとメンバー同士同じ高校の同じ部活。チームを組んでロボットを作って大会に出場し始めたのは高校1年生の時でした。当時は、赤外線を発光するボールをついせきする別の競技に出場していました。これまでの大会結果は下記のとおりです。

高校1年生のとき、サッカー競技ロボットなど作ったことがない状態からスタートしました。部活動内で、先輩や、付属の中学校の生徒で、すでにたくさんの経験を積まれている後輩の方などに、ロボットを作るための技術を教えていただき、部活動を引退するまでの2年間、たくさんのことを学びました。そして大学1年生のとき、再びロボットを1年間かけて制作し、世界大会を目指すことを決めました。年齢制限の関係で今シーズンがロボカップジュニアの選手としての最後のシーズンになります。
「最後なんだからなんでも挑戦しよう!」
これが私たちのスローガンです。迎えた最後のシーズン、いままでやらなかったこと、あきらめたこと、失敗したこと、してみたかったことに、最後のシーズン全力で取り組んでいます。私たちは、世界大会でも最後の最後までその挑戦心を世界中に見せつけます!

①モーター変更で安定した足回りに
モーターの不調は大会中最も防ぎたいことのひとつです。以前までのモーターでは、ロボットを十分動かすのにモーターへの負担が大きく、たびたび動かなくなることがあり、全国大会でも、モーターの不調によりロボットが動かなくなることがありました。その経験から、使用するモーターを見直し、ロボットに合致した最高のモーターを見つけ出します!
②ビジョンシステムのさらなる改良
高い評価をいただいた新ビジョンシステムですが、その整備が難しい点や、調整にやや時間がかかる点でまだまだ完全ではありません。世界大会までに、より最適化したシステムに仕上げ、世界大会ではそのビジョンシステムの有能性を世界に示します!

大会スケジュール
【現地時間】
7月13日 羽田空港出発
7月14日 シャルルドゴール空港着、シャルルドゴール空港出発、サルヴァドール国際空港着
7月15日 サルヴァドール滞在、ロボット調整
7月16日-7月20日 大会出場
7月21日 サルヴァドール国際空港出発
7月22日 シャルルドゴール空港着、シャルルドゴール空港出発
7月23日 羽田空港着

高額な費用!!
大会へは選手2人とメンター1人の計3人で出場します。舞台はブラジル!渡航費だけで200万円以上の費用がかかります。
費用内訳(5月5日試算、確定分含む)
--------------------------------------------------------------------------------------------------
渡航費(羽田~サルヴァドール(フランス経由))・現地移動費:749,000×3 = 2,247,000円
※日本チーム用ツアー費用
日本国内移動費(福岡~羽田往復):40,000×2 = 80,000円
大会参加費:93,000円
宿泊費:148,384円
食費(3人48食):72,000円
ロボット整備費:198,000円
パスポート申請・保険料:51,000円
-------------------------------------------------------------------------------------------------
合計: 2,889,384円
ご支援のお願い
世界大会出場にかかる費用が莫大で、また日本の大会運営からどのぐらい資金援助が受けれるか目処が立っていない状況です。
「世界大会でロボットを走らせたい」、「憧れの世界大会の舞台で優勝したい」
そんな思いを胸にこの3年間、着実に経験を積み重ねてきました。
どうかご支援お願いいたします。


こちらのプランは、「おもしろそう!」、「がんばってほしい!」、「応援する気持ちを伝えたい」という方にお勧めです。
リターンとして、
・感謝のメール
をチームよりお送りいたします。

こちらのプランは、「プロジェクトの活動をもっと知りたい!」、「このプロジェクトとても気になる!」という方にお勧めです。
リターンとして、
・感謝のメール
・活動報告書(PDF)
をチームよりお送りいたします。

こちらのプランは、「プロジェクトの活動をもっと知りたい!」、「このプロジェクトとても気になる!」という方に加え、「ロボット開発に興味が湧いた」、「この大会に興味がある」といった方にお勧めです。
リターンとして、
・感謝のメール
・活動報告書(PDF)
・ロボットの3Dデータ
をチームよりお送りいたします。

こちらのプランは、「プロジェクトをしっかり後押ししたい!」、「しっかり頑張ってほしい」という方にお勧めです。こちらのプランをお選びにいただいた方には、世界大会で撮影した全写真で世界大会の雰囲気をお届けします!
リターンとして、
・感謝のメール
・活動報告書(PDF)
・世界大会で撮影した全写真
・ホームページへのお名前の掲載(ご希望であれば)
をチームよりお送りいたします。

こちらのプランは、「プロジェクトをしっかり後押ししたい!」、「しっかり頑張ってほしい」という方に加えて、「ロボットのより詳しい部分が気になる」という方にお勧めです。こちらのプランをお選びにいただいた方にも、世界大会で撮影した全写真で世界大会の雰囲気をお届けします!
リターンとして、
・感謝のメール
・活動報告書(PDF)
・世界大会で撮影した全写真
・ロボットの3Dデータ
・ロボットに搭載した基板の回路図、配線図、表面実装部品表
・ホームページへのお名前の掲載(ご希望であれば)
をチームよりお送りいたします。

こちらのプランは、「もっと力になりたい」という方にお勧めです。こちらのプランをお選びにいただいた方にも、世界大会で撮影した全写真で世界大会の雰囲気をお届けします!
また、支援者様へチームオリジナルデザインののシャープペンをお送りいたします。
リターンとして、
・感謝のメール
・活動報告書(PDF)
・世界大会で撮影した全写真
・ホームページへのお名前の掲載(ご希望であれば)
・チームオリジナルデザインシャープペン(※)
をチームよりお送りいたします。
【シャープペンについて】
こちらのシャープペンをお送りいたします。
※諸事情によりデザインが変更となる場合があります。
※シャープペン印刷は外部発注です。明らかに品質の劣るものはこちらで選別しますが、シャーペンの品質、動作については保証しかねます。

こちらのプランは、「がっつり全力で応援したい」という方にお勧めです。全力サポートプランに加え、大会中に掲載するチームのポスター、ロボット機体にロゴを掲載し、私たちと一緒に勝利を目指して戦います。また、ロボットの3Dデータ、回路図、配線図、部品表、ソースコードを公開します。
リターンとして、
・感謝のメール
・活動報告書(PDF)
・世界大会で撮影した全写真
・ホームページへのお名前orロゴの掲載(ご希望であれば)
・チームオリジナルデザインシャープペン(※)
・ロボット機体へのロゴの掲載(※)
・チームポスターへのロゴの掲載(※)
・ロボットのデータの公開(3Dデータ、回路図、配線図、部品表、ソースコード)
をチームよりお送りいたします。
※チームオリジナルデザインシャープペンについては【全力サポートプラン】をご参照ください。
※機体へのロゴの掲載は6月30日までにご支援いただいた場合とさせていただきます。
※チームポスターの提出期限によっては、ポスターへのロゴの掲載が間に合わない場合があります。ご了承ください。提出期限が6月30日以降であれば6月30日までにご支援いただいた場合とさせていただきます。

私たちは、奇跡的に世界大会への切符を手にしました。
この世界大会に出るために、高校で2年間経験を積み、選手として最後のシーズン、慣れない新しい環境で1000km先で頑張るチームメイトを信じて、さまざまなことに挑戦しロボット開発を行ってきました。
世界大会がゴールではありません!世界大会で若き技術者の方々と積極的に交流し、新しい知識、技術だけでなく、考え方や価値観などに触れ、帰国後、より広い視野でこれからの創作活動や、研究活動に取り組んでいきたいと思っています。
私たちの挑戦に、
どうか力を貸してください!

このプロジェクトはAll-in方式であるため、目標達成状況によらず終了時点でのご支援額から手数料等を差し引いた額がプロジェクトの実行に当てられます。
ご質問等ございましたら、tachyon.rcj2025@gmail.comまでお問い合わせください。
写真およびロボットデータは、今後の広報および技術継承のためにその一部が使用される可能性があります。ご了承ください。
最新の活動報告
もっと見る
世界大会結果報告
2025/08/12 11:51大会概要世界大会優勝を目指してブラジルサルヴァドール国際会議場で開催されたRoboCup 2025に出場してきました。RoboCupJunior Soccer部門は以下の日程で行われました。7/16:チェックイン、ロボット調整、ミーティング、オープニングセレモニー7/17:2 vs 2予選第1~第4試合7/18:2 vs 2予選第5~第7試合、ジュニアパーティー7/19:ポスター発表、インタビュー、スーパーチーム予選、Junior vs SSL7/20:スーパーチーム予選、テクニカルチャレンジ、アワードセレモニー競技の内容は下記の通りです。■2vs2コート上で自チーム2台、相手チーム2台の計4台で試合を行いました。■スーパーチーム3~4チームで合同チームを作成し、ひとまわり大きなコートで合同チーム同士の試合を行いました。■Junior vs SSL19歳まで参加できるジュニアリーグのロボットと20歳以上も参加できるメジャーリーグの中の1つの競技リーグであるSmall Size League (SSL)のロボットを対戦させる交流試合が行われました。■ポスター発表チームに関する情報をまとめたポスターを掲示して、他チーム、来場者と交流を行いました。■インタビュー3~4チームで自チームのアピールポイントを発表しあい、運営スタッフの方も交えて質疑応答を行いました。■テクニカルチャレンジ高電圧をキック機構に流して新型ボールをキックする、オープンリーグvsライトウェイトリーグなどいくつか与えられた課題から好きなものを選んで取り組みました。競技のほかにも7/18の夜にはパーティーが開催され、他チームと仲を深めました。結果<試合 予選>------------------------------------------------------------------2 vs 2:1勝2分4敗 (20/20位)スーパーチーム:1勝1分3敗 (5/5位)------------------------------------------------------------------------------------という大変悔しい結果になりました。◀ 敗因 ▶世界大会で出会ったロボットは以下の点で私たちと大きく異なっていました。● 強力なシュート私たちのロボットよりもよりストロークの大きくてキック力の高いプッシュ型ソレノイドを使用したキック機構を搭載していてコートの中央付近からでも正確なシュートを放っていた。● ボール保持機構ドリブラーというボールを保持する機構を使用し、ボールを押し出すのではなくつかむようにしてボールをゴールに運んでいた。特にスーパーチームではサッカーというよりはハンドボールのような試合だった。● スマートなビジョンユニット1台のカメラと高精度の全方位ミラーだけでボール等の探索を行っていた。この方法は高精度の全方位ミラーを自作するという高難度が必要であるが、キャリブレーションやプログラムを簡略化しやすいというメリットがある。また、私たちのロボットは次の点が課題でした。●モーターとタイヤの締結不足全国大会からモーターを変更したため、タイヤとモーターの締結方法が大きく変わった。以前はモーターにタップ(ネジ溝)が切られていてナットをはめて固定するという方法だったが、新しく採用したモーターがDカット軸であったためネジで軸を押さえつけて固定するという締結方法に変更した。この方法は脱輪の可能性が高く、事前の交流戦で実際に脱輪が起きていたため、ゆるみ止めを塗って対策を施し、ある程度の締結力を持たせることはできたが、個人がロボットを1台ずつ持っていてロボットが衝突しあうような環境での耐久力を十分確認することができず、実戦で脱輪が相次ぎ、締結力不足が露呈する結果となった。2 vs 2予選2日目により大きなネジとより強力なゆるみ止めを使用することにより試合前とハーフタイムにねじを締め直せば、脱輪が防げるぐらいに締結力を強化することができた。●自己位置推定アルゴリズムの不調初日の調整日に自己位置推定のプログラムがうまく動作していないことが判明した。このアルゴリズムはコート環境に依存するためプログラムの要因であるか環境の要因であるか特定することができず、コート外にロボットが出ることを防ぐプログラムを緊急で作成し、応急処置をしたがコート外に出て、ロボットがコートから多かった。のちに、大会前に福岡でロボットを組み上げた際に2台のUnitVカメラとメイン基板をつなぐ通信線が途中でクロスする誤配線をしていて、左右入れ替わったデータがメイン基板に送信されていたことが無線デバッグシステムからの取得データで判明した。●白線判別能力不足私たちのロボットには白線を検知するセンサーが周囲に16個ついており、少なくはないがメイン基板とつないでいる信号線が4本しかなく、その信号線の割り当ても前後左右というきれいな配置ではなく、右前、右後ろ・・・のような割り当てのため、白線の判別や、ゴールキーパーの白線のトレースに苦労した。また、ジュニアリーグvsメジャーリーグという大きなリーグをまたいだ交流戦でオープンリーグ機は勝つことはできませんでしたが接戦が繰り広げられ、スタッフの方が「皆さんがテクノロジーの大きな進歩を成し遂げている証です。どれだけ多くのことを学んできたかを見て誇らしく思いました」と話されていたことがとても印象に残っており、そしてその言葉にとても勇気づけられました。スーパーチームではゴールを決める活躍!スーパーチームでは各チームのロボットが力を出し合う中、広いフィールドで私たちのロボットがボールをゴールまで運びゴールを決め、同じチームになった他の国のチームと歓声をあげる場面もありました!(Youtube ライブ配信より:https://youtu.be/TJdm8MabPr0?t=1836,ロボットがボールを運んでゴールを決めている様子)<プレゼンテーション>--------------------------------------------------ポスター発表:結果未公表---------------------------------------------------------------------------------ポスター発表では他チームやスタッフの方と特にロボットに搭載しているカメラやCPUについて共有を行った。また、サルバドールの地元の子供連れの方も多く来られていて、お子さんにロボットを持たせて一緒に写真を撮ったり、英語が分からない方もいるので翻訳アプリを使ってポルトガル語に翻訳しながらロボットの説明を行ったりなどもしました。作成したポスターはこのリンクから閲覧できます↓https://drive.google.com/file/d/1suhIfBI6EiCTd663WCHCyjG5zRlVZQMz/view?usp=sharingインタビュー:結果未公表無線デバッグソフトを使って遠隔でセンサの値やカメラとの通信状況を確認できる点や、レンズを使ってカメラの視野を広くした独自のビジョンシステムなどについてアピールし、無線デバッグシステムについてや、なぜカメラを複数台乗せたのかについて質問を受けた。インタビューで使用したスライドはこのリンクから閲覧できます↓https://drive.google.com/file/d/13zEyrpjlgwEOP13DRlyA5Zsw51cSCF0X/view?usp=sharingその他、事前提出の技術資料に関する採点などについても現在未公開のため総合順位は把握できない状態です。交流大会中には、練習フィールドで無線デバッグの実演をしたり、カメラでのボールやコートの探索方法を説明したり、チームで自作した小さなマイコンボードをデータシートと一緒に配布したりして他チームと交流を行いました。英語が苦手ということもあり、初めはうまく交流できるか不安でしたが英語に詰まったときは翻訳アプリも活用しながら積極的に交流に挑戦することができました。国内予選とは違い、試合後には握手をして軽く言葉を交わすなど互いをたたえあうこともありとても良い雰囲気でした。(写真上: オーストラリアのチームにロボットを紹介している様子、写真下: イタリアのチームと試合後の記念撮影)New Step次の目標は今まで私たちが学んできたこと、そして世界大会で学んできたことをRoboCupJuniorを担う次の世代に伝えていくことです。これからも国内の練習大会やOB戦などでプレゼンを行ったり、現役の選手の方々にロボットの紹介や、技術の紹介を行っていきます。また、今回世界大会で見たロボットのアイデア、共有し合った技術は、これからのものづくりや研究活動で生かしていきたいと思います。メンバーは全員今年で二十歳で今回の大会が選手として最後の公式大会となりました。今度はスタッフや審判補助などを通してこれからもRoboCupJuniorの大会を運営していけるように尽力していこうと考えています。コメント中野 湧私はロボットを作るよりはアプリを作ったりWEBサイトを作ったりなど、どちらかといえばロボットのような物体を作るよりかは、パソコンの中のものインターネットの中のものを作るのが好きだと思っていました。今回の挑戦を通して、なんども試行錯誤をして、時にはうまくいかないこともありましたが、うまくいくことも多く、その時にものづくりの楽しさに改めて気づきました。そして、今回世界大会に出場するという決断をしたことで、勝敗以上に、あの会場でしか出会えなかった人、ロボットと出会いなど多くの貴重な経験をすることができ、挑戦することへの勇気をもらいました。これからも、未知の世界へ飛び込む勇気を持ち続け、新し経験を積んでいきたいと思います。中野 葉ロボットの設計を3年続けてきても、今年のロボットは間違いなく最高難易度の設計が必要でした。初めは真ん中に筒と全方位ミラーを置く"よくある"ロボットにするつもりだったのですが、途中で方針を一転して今のロボットへ舵をきりました。前例がないままひたすら試行錯誤を重ねて出来上がったこの機体は今まで見たことのない本当にユニークなもので、なんだか私たちのチームを具現化しているようでとてもわくわくしました。世界大会を通して多くの方からロボットをほめていただけました。Tachyon、それは虚数の質量を持つとされる仮想上の異質な粒子、私たちはそんな他者に埋もれない個性を作り出そうという思いでこのチーム名に決めました。その思いは形にできたと素直に思えるのはきっとこの2025年シーズンが本当に意味があったからだと思います。これからもこの思いを忘れずにものづくりを続けていきたいです。まとめ試合は最下位という大変悔しい結果になってしまいましたが、自分たちのロボットとの大きな違いが分かったこと、そしてなにより他国のチームと交流するというかけがえのない経験をすることができ、私たちにとってとても意義深いものになりました。これもみなさんのご支援がなければ成し得なかったものです。ご声援本当にありがとうございました。リターンについてリターン品の発送やメールの送信は8月中旬から下旬に行う予定です。 もっと見る
世界大会結果報告について
2025/07/30 18:49世界大会出場に向けて、たくさんのご支援ありがとうございました。7/23日までに全メンバーが無事に日本に到着しましたことをご報告いたします。世界大会の結果報告についてですが、現在、メンバーが大会出場中に出された授業の課題および、前期期末の試験勉強に取り組んでいる関係で時間的余裕がないため、投稿を8月6日ごろに行う予定です。お時間おかけして申し訳ございません。 もっと見る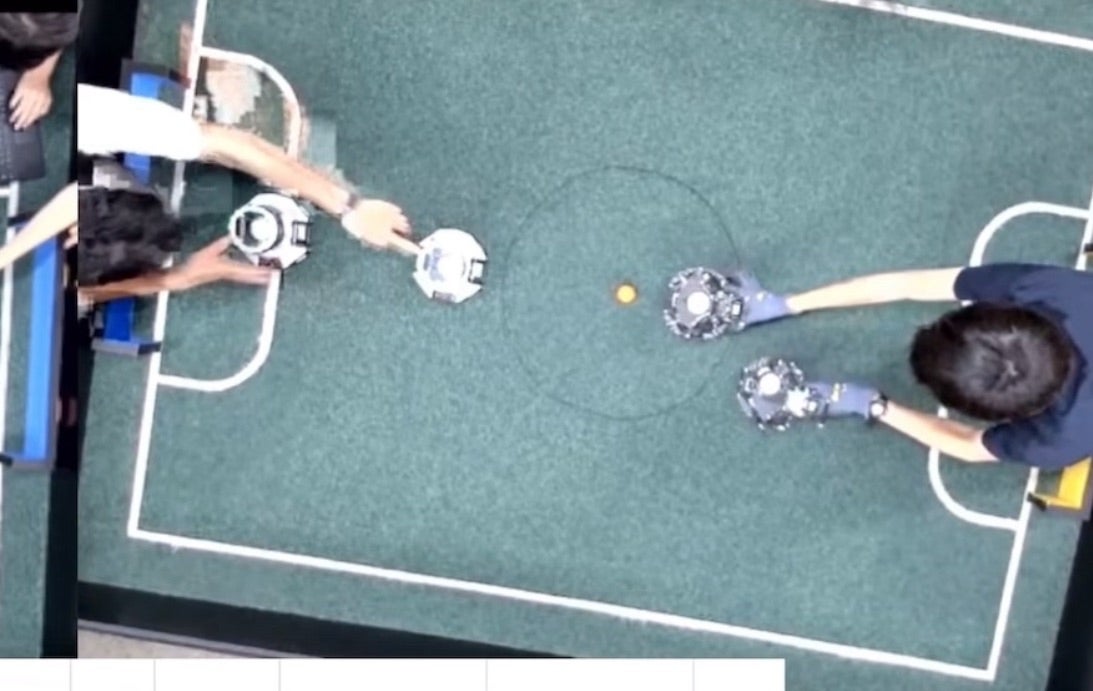
立命館守山中学・高等学校主催「リツモリカップ」に参加!【6/22】in 滋賀
2025/06/28 12:43日本の公式コートでの最後の調整6月22日 滋賀県にある立命館守山中学・高等学校で「リツモリカップ」が開催されました。この大会は選手同士の技術交流などを目的として定期的に開催されており、昨年度は3回参加させていただきました。私たちチームにとって日本の公式大会で使用されるコートで調整を行えるのはこれが最後のチャンスとなるため、はるばる東京、福岡から訪れて参加しました。1試合目からロボットの調整に苦戦限られた調整時間の中で大会会場のコートの色やボールの色など、ロボットにセッティングする作業に時間がかかり、あまり調整できてない中、安定的な動きの相手チームに点数を決められ負けてしまいました(世界大会では前日1日が調整日となっています)。新しい機能が活躍した2試合目2試合目では、昨年の世界大会で優勝した日本のチーム「Crescent(Re)」と対戦しました。1試合目から十分時間がたっていたことから、十分に調整した状態で臨みました。前半、相手のテクニカルで隙の無い動きになかなか対抗できず点数を決められてしまいました。「ゴールを向いてシュート!」得点力を上げる戦法でゴールを奪う!後半、最初は圧倒的な強さを見せる相手に点数を決められながらも、途中でボールを奪い返しゴールを決めました。↑相手ロボットからボールを奪いゴール(左)へ向かう様子そして、試合の一番最後に、この日、動作を確認するために用意したプログラムが機能しました。関東大会、日本大会と実現しようと調整してきたが実装できなかったプログラム「ゴールを認識してシュートするプログラム」です。上の画像は、試合開始直後、互いのロボットがオレンジ色のボールめがけて突進した後、ボールは右に転がり、そのボールを奪ってロボットがゴールの左端の空きスペースを認識して、そこにめがけてキックしている様子です。キックしたボールはゴールに入らず、壁に当たってしまいましたが、再びそのボールをゴールに向けてキックしてゴールをきめました。ただ一定方向を向いてボールに突進する方法ではゴールを決めることはできなかったこの場面、ゴールの場所を知ることが、点数を決めるうえでどれほど重要なのか知る一場面となりました。プレゼンで交流この大会で試合以外に行われるのがプレゼン会です。この大会に参加する際はほぼプレゼンを行っています。今回は、私たちのチームの1つの特徴である遠距離開発、そして私たちのチームが新たに取り組んだカメラの景色からコートの形状を把握する手法、ワイヤレスでデバッグを行うシステムについて紹介しました。今大会の反省今回の大会では、ロボットの調整の部分で課題が浮き彫りとなりました。チームメンバーの人数が少ない中で、いかに役割分担して、その会場に適合した状態に仕上げるかというのが、試合を有利に進めるための鍵となると思います。世界大会では、互いに事前に調整すべき項目を挙げ、チャックリストのようにし、互いに効率よく調整が進むよう役割分担を行おうと思います。そしてプログラムの面では、ゴールを認識するプログラムがうまく動作していることを確認できました。その一方で、ボールが見えなくなった時の動きや、ロボットのコート上での役割分担(1機が攻撃にまわり、1機が守備にまわるなど)のプログラムの詰めが甘いことが浮き彫りとなりました。出発までの2、3週間、おもにその点に重点を置き、調整を進めようと思っています。世界大会まで残り2、3週間、そして最後のロボカップジュニアの選手としての時間を大切にしていきながら、精一杯頑張りたいと思います。応援よろしくお願いいたします! もっと見る







コメント
もっと見る