

こんにちは、インターステラテクノロジズ広報チームです。
2019年の年末年始の打上げから延期をしていた観測ロケット「MOMO5号機」ですが、これまで原因究明・対策活動を続け、昨日ようやく次回の打上げ予定日時を発表することができました。
その後の状況など、気になっていた方も多くいらっしゃるのではないかと思います。大変お待たせしてしまって申し訳ございませんでした。
これまでの経緯の詳細や、打上げ当日の案内などを紹介させていただきたいと思います。
冬季打上げ延期の原因は?
2019年12月29日~2020年1月2日の期間で観測ロケット「MOMO 5号機」の打上げを実施したものの、ロケットの機体に搭載した電子機器の不具合により、延期をよぎなくされてしまいました。
機体の内部には、あちこちに飛行を制御するための基板やセンサ基板が多数あるのですが、それらの基板間でデータをやり取りするための「CANバス」という通信線を繋げています。
その「CANバス」でわずかにエラーが出たというのが、冬の打上げで起きた事象でした。
「MOMO」は、まるで自動車の自動運転のように、正しい方向に飛んでいくために自分自身で機体を制御するように出来ています。そのために、機体の内部は、上部から下部まであちこちに分散して多数の電子機器が搭載されています。その間は「CANバス」という通信経路で結ばれていて、制御用コンピュータがいろいろなセンサを読んだりバルブを開閉したりするようになっていますが、この通信経路「CANバス」にエラーが散発的に発生する現象が起こりました。
この「CANバス」にエラーが起きると、飛行中の姿勢制御が正しく行われなくなる危険性があります。すぐにそのような危険が発生するようなエラー発生状態ではありませんでしたが、もしエラーが酷くなれば飛行の安全に影響が及ぶため、延期を決定しました。
再現実験を行って、原因を特定
「CANバス」で出たエラーの原因を特定するために、当時と同じ状況を再現すべく、酸化剤である液体酸素を充填する実験などを行ってきました。。液体酸素は約-183℃と非常に冷たく、機体の一部は急激に冷却されます。常温と低温でそれぞれ、「CANバス」エラーを再現することができました。

結果を分析したところ、一部の基板のCANバスの通信速度に異常を発見しました。
本来であれば、機体の内部にある全ての基板は、正確に同じ速度でCANバスに対してデータを送受信する必要があります。その速度は、基板に載っているオシレータという部品の周波数で決まりますが、一部の基板でオシレータの周波数が狂うと、通信エラーが発生します。
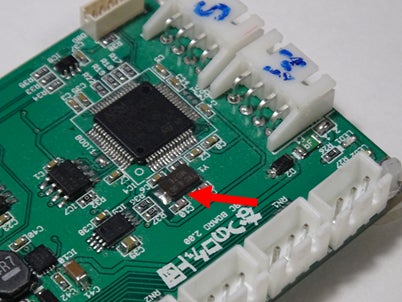
基盤に載っているオシレータ(矢印の部分)
正常なオシレータの周波数誤差は0.00001%~0.001%ですが、今回の誤差は数%のずれでした。
例えば、オシレータが1秒間に10,000,000回 の信号(クロックパルス)を送る場合だと
正常な場合の誤差は1秒間に10,000,100~10,000,001回ですが、
今回のエラーは、1秒間に10,100,000回も信号が送られてしまい、
他の基板の通信と噛み合わなくなり、エラーになってしまった、というようなイメージです。
様々な実証実験を行った結果、オシレータの故障の原因は、常温→低温→常温→低温…と温度が変化する温度サイクルによる部品の劣化だと推測されました。
部品の交換や実験、リハーサルを行い、打上げリベンジへ!
次回打上げに向けた対策として、すべての電子基板のオシレータを交換し、部品の温度サイクル試験(常温→低温→常温→低温…を繰り返す)の実施を行いました。

オシレータの部品の温度サイクル試験中。この大きな機械の中に部品を入れて試験をします。
また、先日はフルドレスリハーサルという、打上げ当日の環境をなるべく忠実に再現して実施するリハーサルも実施し、CANバスのエラーが発生しなくなっていることを確認しました。
フルドレスリハーサルでは当日の機体動作、手順、体制までを全て通しで行います。
ちなみに、フルドレスリハーサルというのは、よく舞台稽古で衣装付きで本番さながら行うリハーサルのことを言います(だからフルドレス)。私たちは略してFR1(フルドレスリハーサルの1回目)、FR2(フルドレスリハーサルの2回目)などと呼んだりします。
ともあれ、これでMOMO5号機の機体の準備は整いました!
MOMO5号機の打上げ日を発表!
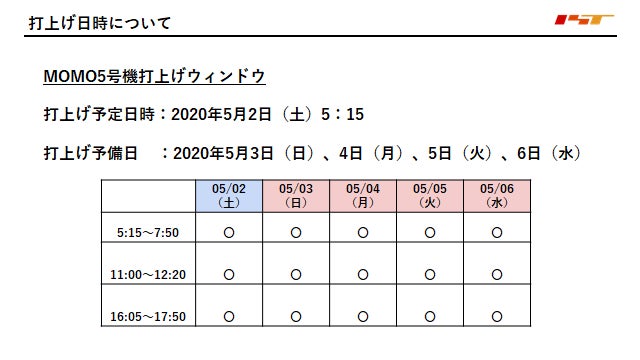
機体の準備も整い、昨日、オンラインでの記者会見でMOMO5号機の打上げ予定日を発表しました。
インターステラテクノロジズ 観測ロケット「MOMO5号機」記者会見・「ゼロからはじめる力」出版記念トークイベント
全国的に緊急事態宣言が出ているなかではありますが、これまで関係各所と調整を重ねて確保させていただいた打上げ可能期間です。ロケットの打上げ自体は延期しない、できるだけ開発活動は止めない、という結論を出しました。
無観客での打上げ実施。オンラインでの生中継はします!

ただし、今回のロケット打上げは、新型コロナウイルス感染拡大防止の観点から「無観客での打上げ実施」となります。大変申し訳ございませんが、大樹町内で見学できる会場は一切ございません。大樹町主催のパブリックビューイングも、IST主催のロケット打上げ見学場スカイヒルズもありません。当日は道路の警備をこれまでよりも一層強化させていただきます。
道路での見学は大変危険ですし、畑や牧場に立ち入ることで家畜や畑にとって有害な病気を持ち込む可能性があります。絶対に、道路での見学は行わず、畑や牧場に立ち入らないようにしてください。
こんなことをお伝えするのは本当に申し訳なく、心が痛むのですが、お願いですから大樹町には来ないでください。本当に、本当に、お願いします。
みなさまが見学に来てしまうことで、今後の打上げ自体が難しくなる可能性があります。ぜひご理解とご協力をいただきたいです。
もちろん、打上げ当日の様子はYouTube等で生中継させていただきます!詳細なURL等は追って、ISTの公式TwitterやYouTubeにて案内させていただきます。
ぜひご自宅から、MOMO5号機が宇宙に行く様子を見守ってください。
二度目の宇宙到達。
心が暗くなるニュースが続く日々ですが、そんな時だからこそ、私たちにできることを。
宇宙到達を達成し、日本全国に、明るくハッピーなニュースを届けられるようにメンバー一同頑張ります。
応援、よろしくお願い致します。






