 LINEで送る
LINEで送る【番外編】うおーるぼっとあにまる
2012/05/31 18:14
壁を走るロボットの技術を応用して、ホワイトボードの線を消して回るロボットを作ってみました。今回のプロジェクトで開発するうおーるぼっとでもホワイトボードイレイサーを取り付ければ同じことが可能です。
壁を走るロボットの技術を応用して、ホワイトボードの線を消して回るロボットを作ってみました。今回のプロジェクトで開発するうおーるぼっとでもホワイトボードイレイサーを取り付ければ同じことが可能です。

Rev.1から壁走行時のバランスを改善したのがRev.2です。Rev.1では、前方に重心が集中していたため、地面と水平に走行すると段々下がっていってしまうので、Rev.2では重心が中心になるように調整しました。 Rev.2はMakeTokyoMeeting '07というイベントで5台の限定販売を行ないました。

キット化をイメージして、作った最初の試作です。基板をフレームにして、機械的な部品数を減らして作りやすく設計しました。
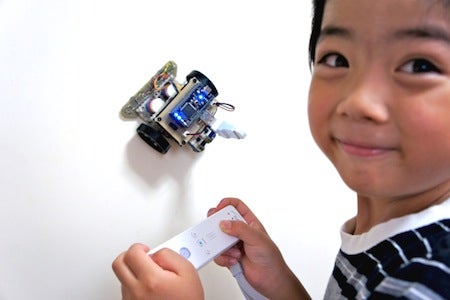
mbedというマイコンボードを使って、スタンドアローンでWiiリモコンとBluetooth通信してコントロール出来る様にしたのがプロトタイプ3号です。センサーを使ったゲームモードや自立的に走るモードも作ってみました。これはニュースサイトでも取り上げてもらいました。 Wiiリモコンで操作する壁ロボット「うおーるぼっとNeo」Wiiリモコンで操作! 壁を自由に走り回って遊べるロボット(動画)
プロトタイプ1号は自動的に走るだけでしたが、このプロトタイプ2号はWiiリモコンで遠隔操作出来る様にしました。 使ったマイコンはフィジカルコンピューティングで有名なArduino。 WiiリモコンはパソコンとBluetoothで通信して、パソコンとArduinoを積んだプロトタイプ2号がZigbeeという無線通信を行っています。 プロトタイプ2号ははんだづけカフェのオープニングイベントや秋葉原のイベントで公開して、たくさんの小さなお友達から大きなお友達まで遊んでもらいました。







jksoftさんへアンコール