 LINEで送る
LINEで送るうおーるぼっと 自動走行(その1)
2012/06/12 01:18
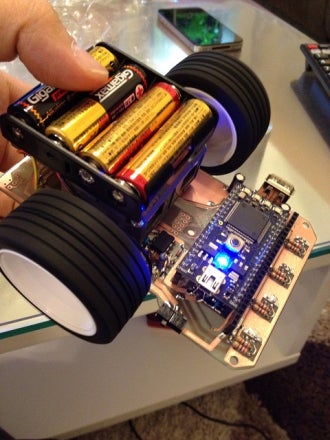
ーーーーーーーーーーーーーーーーーーーーーーーーーーーーーー6月16日(土)は、横浜の赤レンガ倉庫で開催されるエンルートフェスタ2012でうおーるぼっとの展示及びデモを行います。実際に動きを見たり、操作を体験していただける機会なので、興味のある方は是非、お越し下さい。エンルートフェスタ2012ーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーうおーるぼっとに搭載されているセンサーを使って、自動的に走らせることもできます。これは、黒いテープで囲った範囲の中で走るようにプログラムしています。また、走行するスピードもギアボックスのギア比を組み替えることで4段階変更することができます。垂直面を走らせるときはパワーが必要なのでスピードを調整する必要がありますが、地面であれば高速で動かすことも可能です。