



川霧立つ厳冬の朝、給電システムのチェック、Li-ionバッテリーの消費電力計測、自動飛行のためのパラメータチューニングのための飛行試験を実施しようとしていました。

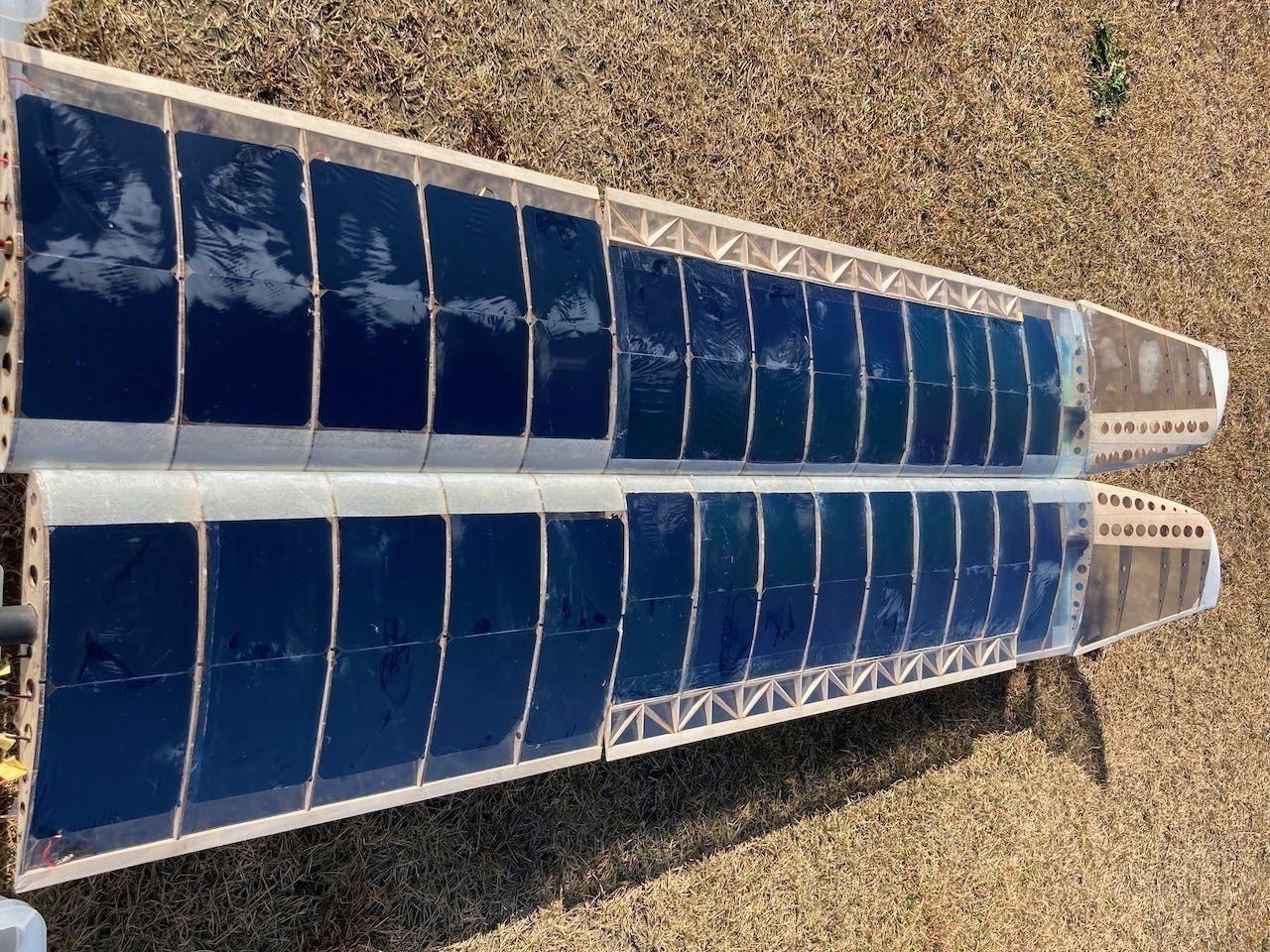
外気の寒さによりソーラーパネルにも霜が付着。今回は太陽光発電も試験項目にあったため、配線作業の合間に翼を拭きつつ、制御パラメータの確認を行っていました。



日も昇ったころ、機体は無事に飛び立ち、これまでの飛行試験通りとても安定して飛んでいました。 制御パラメータを変更した試験の実施中、突如機体が縦の振動をはじめ、そのまま発散しループを繰り返し始めた。立て直すこともできず、そのまま墜落…。
制御パラメータを変更した試験の実施中、突如機体が縦の振動をはじめ、そのまま発散しループを繰り返し始めた。立て直すこともできず、そのまま墜落…。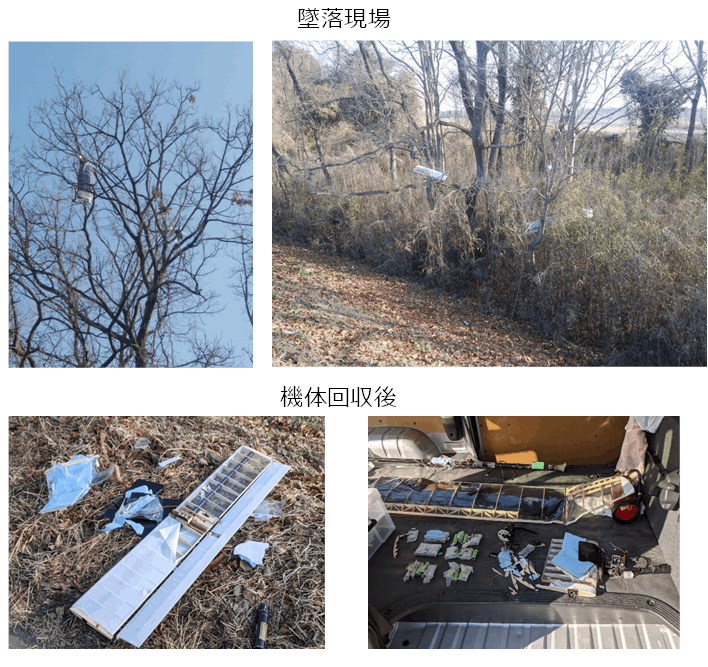

藪の中の木に激突して墜落したため、機体回収のための捜索隊がその場で発足しました。バレンタインデーに草を掻き分け、機体はほぼ全回収しました。
(補足:本機は飛行許可を得ている飛行場で飛ばしており、飛行および墜落箇所は、民家等の無い飛行可能エリアです。)
フライトログも回収できたため、起こった事象についてその後数週間かけて調査を行いました。
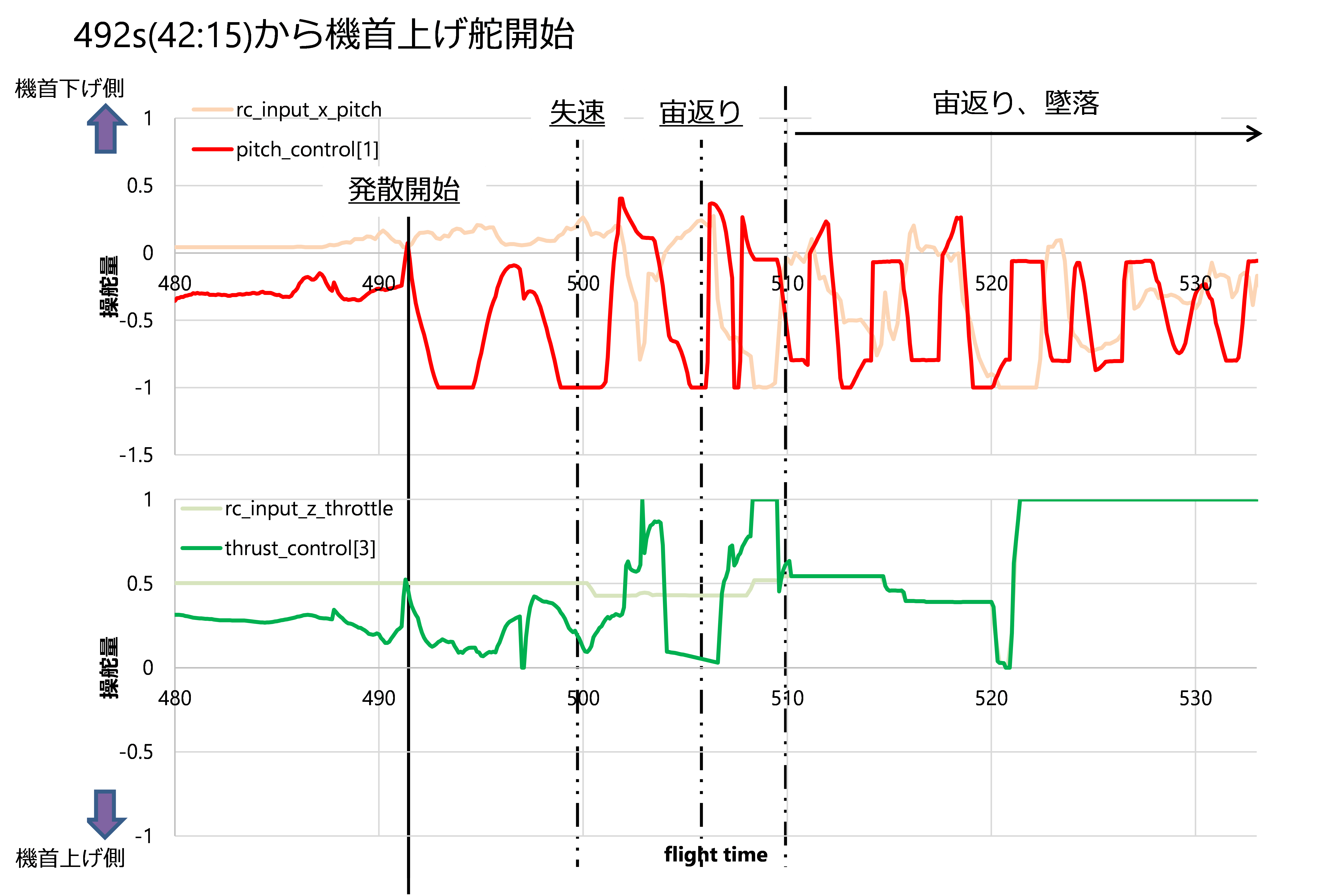
まず、発散した付近のタイミングにおけるピッチおよびピッチレートの目標値(setpoint)と実際の値を確認すると、機体が制御目標値に追随できず、発散している様子がわかりました。
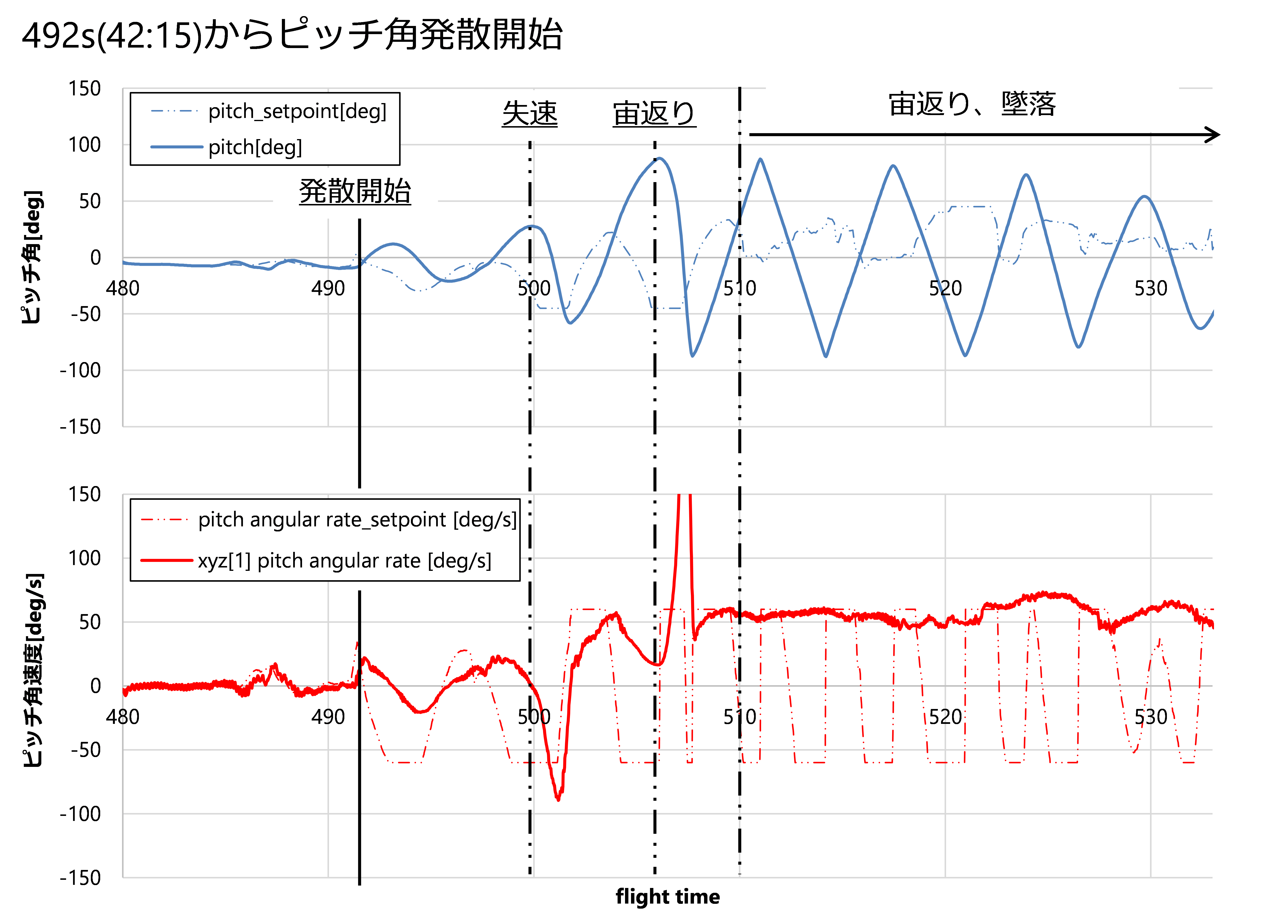
発散したタイミングで、パイロットの意図と異なる急なピッチ上げ操作と推力上げが発生していました。
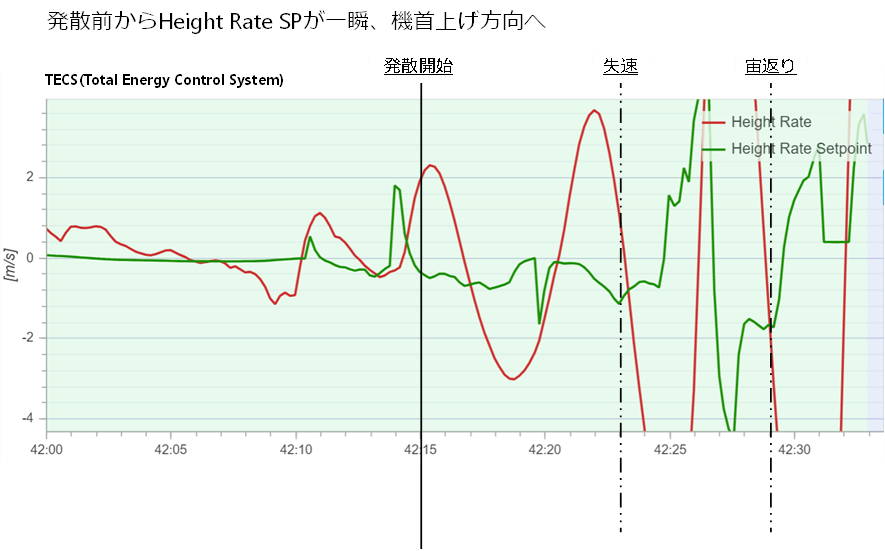
機体の自動制御は、上記で確認したパラメータであるピッチと推力を相互に制御する、PX4のTECS(Total Energy Control System)というロジックに基づいています。ここに原因があるのではないかと考え、TECSのログも確認したところ、Hight Rateの目標値が発散開始直前に急な上昇を見せていたことがわかりました。
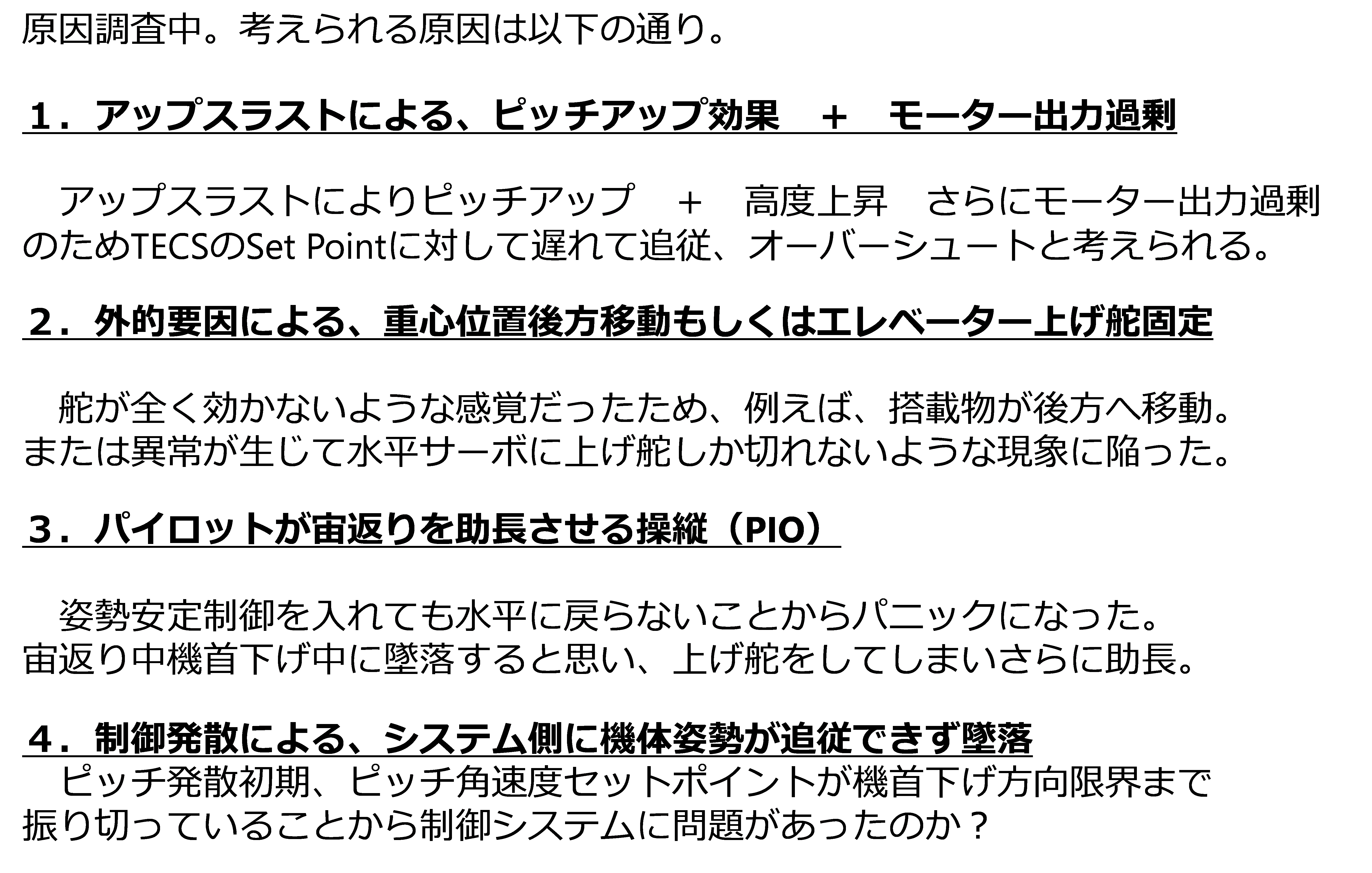
この原因として、機体由来のものと制御由来のものの両方が考えられますが、ここで、一連の議論で出た内容についてFTA(Fault Tree Analysis)を実施することで、要因について整理して俯瞰しました。
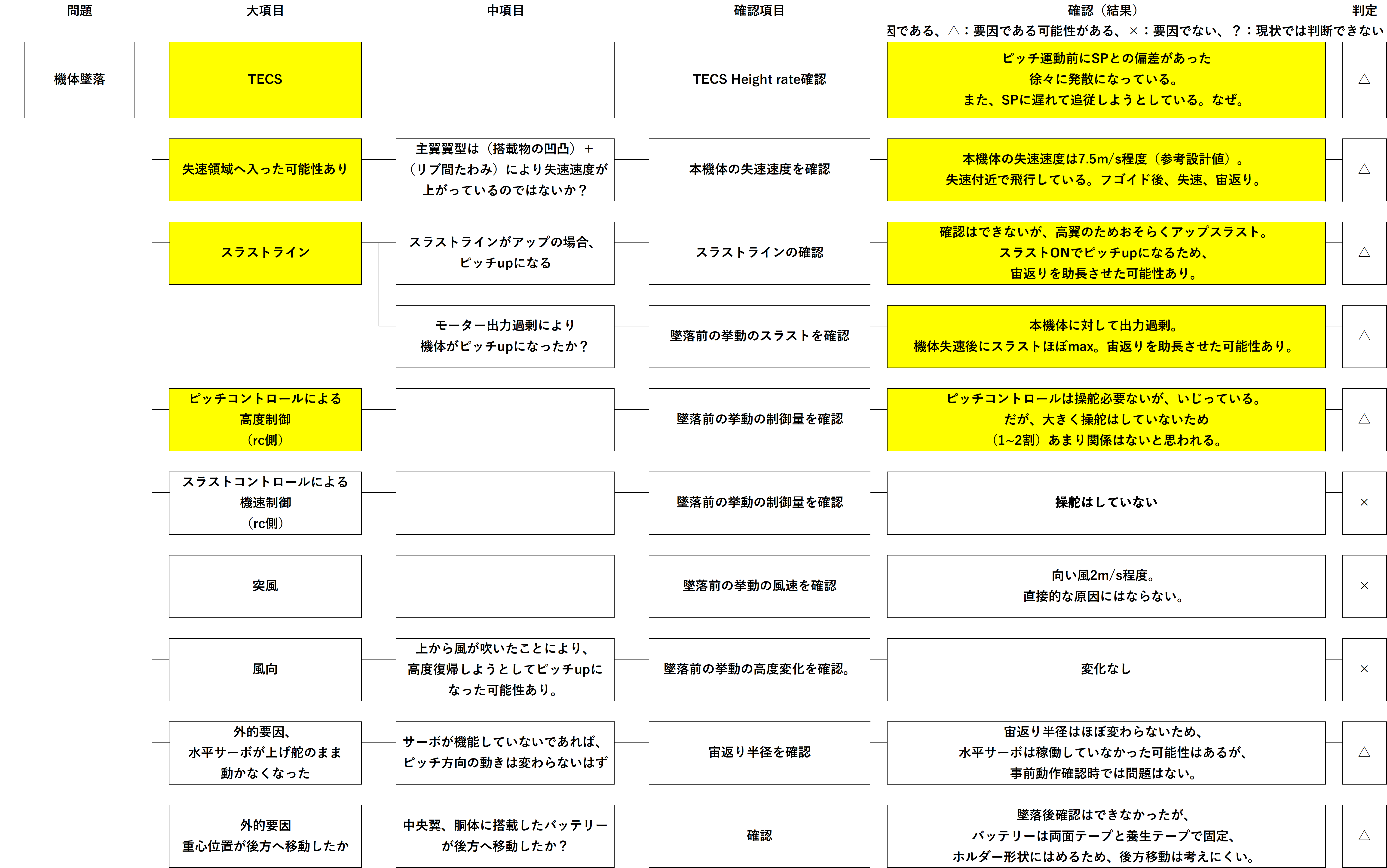
残念ながら機体構造が破損しているため、原因を1つに特定することは難しいですが、今後の対策として、考えられた要因をすべて潰していくこととしました。
1.モータ出力過剰であったことについては、飛行直前にキャリブレーションを行っていなかったことが要因として挙げられるため、実施する。2.機体製作に余裕を持たせ、装備品の固定箇所のチェックおよび修復箇所の確認時間を十分にとる。3.あくまで落ち着いて操縦すればリカバリ可能であったPIO(Pilot Induced Oscillation: パイロットが飛行を安定させようと操縦をするも意図と反した結果となる現象)であるため、チャレンジ当日までパイロットは無線操作の練習と習熟に努める。4.ピッチ角速度とTECSは相互にリンクする話であると考えられるが、制御システム側に問題がなかったかという観点でも調査を実施する。
とはいえ、あくまでオーソドックスな機体設計や制御を行っているため、基本的には飛行機のイロハを徹底するというのが前提にあると考えております。失速特性について把握しそれに近しい領域で飛ばすようにしない、機体の各パーツの重量・重心位置を逐一管理し、機体特性をデータ化したうえで議論を行う、など、本来当たり前であることを丁寧に進めていくよう心掛け、24時間飛行チャレンジ当日まで手を止めず前進していこうと思います。
