







はじめに
はじめまして!Abilityの吉田と申します。
沢山あるプロジェクトの中から、こちらをご覧いただきありがとうございます。
Abilityは長年、企業様やパートナー様と共に、様々なシステム開発に携わってまいりました。
今年Abilityは活動開始から25周年を迎えます。
これまで25年間活動を続けて来られたのも、支えてくださった皆様のおかげと感謝しています。
この感謝の気持ちを形にして次世代につないでいきたいと考え、このプロジェクトを開始しました。
このプロジェクトで実現したいこと
電子工作は興味があるけれど難しそう、専門知識がいるのでは? ロボットアームは高価で…など、ハードルが高いと感じておられる方も多いのではないでしょうか。
Abilityでは気軽に電子工作に触れていただけるよう、そして長く学習にご利用いただけるよう、ARE-ARM1(Ability robot education-Arm1)工作キットの試作機を開発しました。
学習用ですのでとってもコンパクトです。
中高生以上を対象としていますが、小学生のお子様でも大人のサポートがあれば組み立て可能です。
最近では子供たちの情報活用能力の育成に向けたプログラミング教育の必修化が話題となっています。
工作したARE-ARM1はブロック型のビジュアルプログラミング言語スクラッチでプログラミングすることでアーム動作を制御することが出来ます。
既に試作機は完成していますので、現在は製品化に向けて改良やテストを実施中です。
出来る限り安価でのご提供を目指していますが、アーム1台分製作するとなると電子部品や3Dプリンターでの出力自体にそこそこコストがかかり、それなりの価格になってしまいます。
そこで1つの教材で、長く、たくさんの事にご利用いただけることでコストパフォーマンスを良くしたいと考えています。
今回はスクラッチ2.0でのプログラミングについてサポートしていますが、今後はロボットプログラミング(ROS) にも対応します。また、AREシリーズとしてカメラ(ARE-CAM1)の搭載や、ロボットアーム搭載可能なロボットカー(ARE-CAR1)の開発、製品化も計画しています。
AREシリーズについてはコミュニティページを開設する予定です。
工作支援、プログラム支援、Q&A、皆様からのご意見、動画、写真などを掲載していきます。
一人で作るのは不安と思われる方も、コミュニティページに参加しながら、みんなと一緒に作ってみませんか?
Abilityではソフトウェアの開発には長年の経験と実績がありますが、ハードウェア開発はまだまだ経験不足です。ましてや教育の分野においては素人同然です。皆様のご意見などをいただきながら、皆様と共にAREシリーズが成長出来れば幸せです。
習うより慣れよという言葉もありますが、実際にさわって動かしてみることが理解への近道ではないかと思います。
一人でも多くの方に私共のプロジェクトを知っていただき、電子工作やプログラミングにチャレンジしていただく機会をご提供出来ればと考えています。
また、個人様だけでなくプログラミング教室の教材としてもご利用いただけると幸いです。
ご支援のほどよろしくお願いいたします。
これまでの活動
ARE-ARM1は2020年12月に試作機版が完成しました。
スクラッチ2.0でアームの動作を制御してブロックを移動しています。
アーム本体、グリッパーは3Dプリンターで出力しました。
各軸には安価なステッピングモーターを使用しています。
安価なステッピングモーターを使用した場合、パワーがないためアームの各軸の長さや形状を調整し、何度も試作を繰り返し設計に反映しました。
試作機版のマイコンはAbilityに在庫のあったArduino Nanoを使用しています。
製品版はマイコンをESP32に変更しWifi環境からも使用出来るよう基板の設計、プログラムを改良中です。
また、Rosでの制御を視野に入れた研究開発も並行して行っています。
(OSはLinux:Ubuntu18.04、Ros:Melodic です)
現在、URDFファイルを作成し、Rviz等のROSアプリケーションの3D視覚化ツールにも対応中です。
今後、Rvizを動作させることで実機も連動するよう対応します。
次の動画はロボットシミュレーターCoppeliaSim (旧VREP) を使って、ARE-ARM1の動作をシミュレートしています。(OSはWindows10です)
ARE-ARM1工作キットでできること
1.3Dプリンターでのパーツの出力(ベーシック版)
グリッパーとロボットアーム本体は3Dプリンター用データ(.stlファイル)を提供します。
各パーツはご家庭用3Dプリンターでも出力出来るように90mm×80mm以下のサイズに設計しています。
データで提供しますのでお好きな素材で作れ、万一壊れた場合でもその部分のパーツを出力して修理出来ます。
また、提供したデータをもとにご自分用に形状を改良することも出来ます。(※注1)
基本的には3Dプリンター用データでのご提供となりますが、今回、3Dプリンターでの出力が困難な方には出力済みのパーツでお届けします。(※注2)
カッコいいアームを製作してコミュニティページで発表してください。
(※ 注1)
形状を改良した場合、上手く動作しなくなる可能性があります。自己責任でお願いいたします。
改良したデータの商用利用はご遠慮ください。
(※ 注2)
3Dプリンターの特質上、1台分のパーツの出力に時間がかかります。
お届け開始日に間に合うよう努力いたしますが、混みあった場合はご支援いただいた順番での発送となります。ご了承ください。
お急ぎの場合、リターンにベーシック版(3Dプリンター用データ )をご選択の上、専門の3Dプリンター出力サービス等のご利用をお願いいたします。
2.電子部品を使用した組み立て
ロボットアーム1台を製作するために必要な電子部品やネジ類等の備品をセットでお届けします。
工作マニュアルでは写真等を多用し、工作方法を丁寧に記述します。
特に難しい専門知識も必要ありません。
また、コミュニティページで工作支援をおこないます。
以下はマニュアルのイメージです。

3.スクラッチでプログラミング
工作したARE-ARM1はブロック型のビジュアルプログラミング言語スクラッチでプログラミングすることでアーム動作を制御することが出来ます。
以下はスクラッチ2.0の「実験的HTTP拡張…」機能を使用したプログラムイメージです。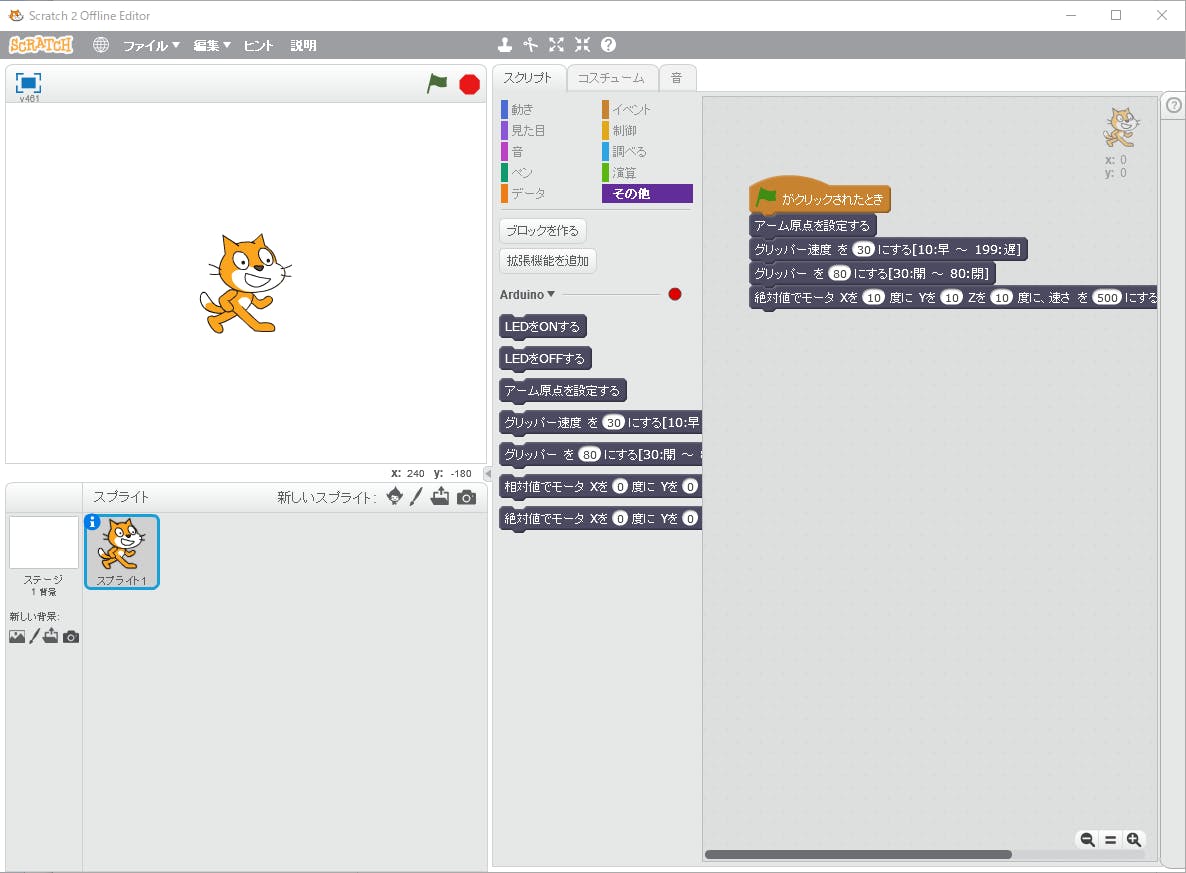
プログラミングマニュアルでスクラッチ2.0での使用方法を詳しく解説します。
また、コミュニティページでもQ&Aなど支援をおこないますので安心して始めていただけます。
アームを制御した動画や写真をコミュニティページで発表してください。
4.今後のバージョンアップについて
今回のスクラッチバージョンは2.0ですが、スクラッチ3.0にも対応するべく、スクラッチ3.0の拡張機能プログラムを作成中です。
今はまだArduino UnoとのLEDチカチカレベルですが、近いうちにARE-ARM1用基板と接続してロボットアームを制御します。
今回の対応OSはWindowsですが、今後、Linuxのロボットプログラミング(ROS) にも対応します。
CoppeliaSim (旧VREP)、Rviz等のシミュレーターや可視化ツールにも対応します。
ArduinoプログラムやRosでの制御などもサポートして行きます。
Python、C++、C#言語等のサンプルプログラムも提供して行く予定です。
プログラム初級編のスクラッチから、上級編のロボットプログラミング(ROS) まで1つの教材を最大限に活用できます。
また、AREシリーズとしてカメラの搭載や、ロボットアーム搭載可能なロボットカーの開発も計画しています。
カメラを搭載することで画像認識が出来るようになります。物体を選別してアームでピックアップすることや、ペットの見守りなどが可能になります。
ロボットカーは単体でも使用できますし、ロボットアームを搭載することも出来ます。
例えばロボットカー+カメラ+ロボットアームで指定した物体をピックアップしに行く自動走行車とか作れたら楽しいですね。
5.ARE-ARM1の特徴について
ARE-ARM1の一番の特徴は多くの方に電子工作やプログラミングに触れていただくため、可能な限り安価で教材を提供することです。そうした趣旨を実現するため、電子部品には性能より価格を優先しています。(もちろん最低限の性能は必要ですが)
部品自体お求めやすい価格のものをチョイスしていますので、万一壊しても安価で買い替えできますのでどんどん触って試していただけます。
もし、ロボットアームのご購入をご検討の方で、スタイリッシュで精度の良い製品をお求めの方や、工作やプログラミングに興味のない方は、性能の良い部品を使用している既成のロボットアームのご購入をお勧めします。
資金の使い道
・エンジニア育成のためのAREシリーズ研究開発費
・3Dプリンター購入費(リターンのパーツを速やかに発送するため)
リターンについて
全コース共に心よりのお礼メールを送付させていただきます。
工作キットを選択いただいた方は会員登録させていただきます。
会員登録を希望されない方は備考欄よりご連絡ください。
各コースの詳細は以下の通りです。

※注意事項
3Dプリンター用データ、工作マニュアル、プログラミングマニュアル、
サンプルプログラムはホームページからダウンロードしていただく予定です。
準備出来次第、詳細や手順をご連絡いたします。
Abilityでは3Dプリンターの出力は本業ではありませんので、3Dパーツの量産は
出来ません。
3Dパーツを選択された方へは、提供予定日での速やかな発送を目標に
ご支援いただいた順に製作していきますが、混みあった場合は順次発送となります。
ご了承ください。
少しでも早くお届けするため、3Dプリンターの特質であるバリやサポートなどは
そのままの状態でお届けします。
フィラメント素材は、黒:Pxmallon PLA Black、オレンジ:Pxmallon PLA Orange、
黄色:Pxmallon PLA Yellowを使用していますが、在庫切れの場合は予告なしに
変更する場合があります。
改良に伴い、仕様やデザインが一部変更になる可能性もあります。
ご了承ください。
ARE-ARM1 電子部品詳細

実施スケジュール
リターンの発送開始は6月上旬を予定しています。
スケジュールの詳細は以下の通りです。

最後に
最後までご覧いただきありがとうございます。
AREシリーズはお子様だけでなく、コロナ禍における今後の働き方を検討されている方や、おうち時間を利用してお子様やお孫様と一緒になにかやってみたいとお考えの方、使用する教材をお探しのプログラミング教室様など、幅広く多くの方にご利用いただければと思います。
微力ではありますが、このプロジェクトが未来のエンジニア育成の一助となることが出来れば幸いです。
何卒、ご支援のほどよろしくお願いいたします。
<All-in方式の場合>
本プロジェクトはAll-in方式で実施します。目標金額に満たない場合も、計画を実行し、リターンをお届けします。
最新の活動報告
もっと見る
本日よりARE-ARM1工作キットの発送を開始いたしました
2021/06/03 07:37この度は、数あるCAMPFIREのプロジェクトからARE-ARM1をご支援いただきありがとうございました。本日よりARE-ARM1工作キットの発送を開始いたしました。また、電子工作サイト”Let's do it with Ability”を、プレオープンいたしました。https://robot.ability-evolves.comARE-ARM1工作キットについては以下のサイトをご確認ください。https://robot.ability-evolves.com/arm1マニュアル一式は以下のサイトからダウンロードいただけます。https://robot.ability-evolves.com/working-on-electronics/arm1/download-are-arm1何かお気づきの点やお問い合わせがございましたら、お気軽に下記サイトよりご相談ください。https://robot.ability-evolves.com/inquiryそれでは、ARE-ARM1工作キットで、電子工作やプログラミングをお楽しみいただけると幸いです。これからも、皆様に喜んでいただけるキットをお届けしていきたいと考えております。今後ともよろしくお願い申し上げます。 もっと見る4月のスケジュールについて
2021/03/29 02:06当プロジェクトもまもなく終了となります。ご支援くださった方々、ありがとうございます。あとわずかとなりましたが、ご支援よろしくお願いいたします。3月のスケジュールは予定通り完了する見込みです。6月の発送に向けての4月のスケジュールは、マニュアル、サンプルプログラム類の作成ですが、以下内容で予定しています。写真などを多用したわかり易いマニュアルです。■工作マニュアル1.ARE-A1のキット内容 ・3Dプリンタ用データのダウンロードについて ・電子部品の内容について2.組み立て方 ・ロボットアーム本体の製作について ・各部位の組み立てについて 1)基板部 2)グリッパー部 3)アーム台部 4)アーム部 5)基板ケース部3.操作方法 ・動作環境について ・操作方法について■プログラミングマニュアル1.ESP32について2.Scrach2.0のインストールと使い方について3.ARE-ARM1の動作命令について4.プログラミング基本編 1.基板のLEDでLチカしてみる 2.ARE-ARM1の動作命令を実行してみる ・グリッパー開閉 ・相対値でアーム移動 ・絶対値でアーム移動5.プログラミング応用編(サンプルプログラム付き) 1.ブロックを移動してみる 2.ティーチングしてみる ・各軸の位置を保存する ・各軸の位置を記録したファイルを読み込み動作を再現する 6月以降開設予定の会員サイトでも、工作やプログラミングについて情報を発信していきます。キットをご購入いただいた方には基本無料でご利用いただけます。ARE-ARM1のロボットアームの運動学・逆運動学など、少し専門的なプログラミングもお届けする予定です。 もっと見るARE-ARM1のデザイン(寸法)について
2021/03/27 09:05ESP32版の動作テストもほぼ完了し、ARE-ARM1のデザインも固まってきました。より良い物をお届けするため、若干の変更があるかもしれませんが、おおむね下図の寸法になります。 とってもコンパクトなサイズです。 もっと見る







コメント
もっと見る