2012/10/27 12:52
今回は伊豆大島実験で使用する不整地走行実験用の
ローバー車輪の製作を紹介します。
月の地表はレゴリスという走行しづらい特殊な砂に覆われており、
さらに障害物も多い可能性があるので、
ローバーには高い走行性能が求められます。
今までの惑星探査ローバーは車輪の数を増やしたり、複雑なシステムを使い、
これに対応してきました。
しかしローバー自体の重量やサイズが大きくなり、
運用には仕方なく高いコストがかかってきました。
この問題に私たちは車輪の径を大きくすることで対応しようと考えています。
技術開発のリードをする吉田教授の研究によると高い走行性能を実現する上で、
キーになるのは車輪の径の大きさだ、ということで、
それによって、より効率よく走行性能を上げることを目指しています。
成功すれば少ない車輪数、シンプルな構造で、重量を抑えることができ、
ローバーの開発や運用コストを大幅に下げることができます。
そこで伊豆大島では、
これから作るプロトタイプモデルに適切な車輪径を選定するため、
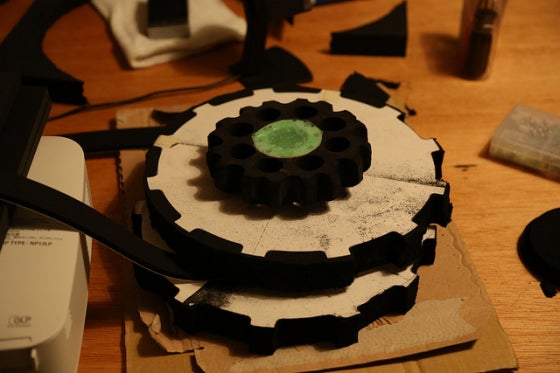
いくつかのサイズの車輪を作成し走行試験を行い、データをとる必要があります。
が残念ながら現状、資金が潤沢にあるわけではありません。
サンプルの車輪はホームセンターなどで売っているウレタンフォームを、
自分たちで成形し作ります。これが結構タフな作業なんです。。
伊豆大島の実験まで残すところも少なくなってきました。
メンバーはこの活動とは別に仕事をしているため、
なかなか時間をとることが難しいのですが、仕事帰りや週末を活用し、
急ピッチに準備を進めています!
WLS金田
ローバー車輪の製作を紹介します。
月の地表はレゴリスという走行しづらい特殊な砂に覆われており、
さらに障害物も多い可能性があるので、
ローバーには高い走行性能が求められます。
今までの惑星探査ローバーは車輪の数を増やしたり、複雑なシステムを使い、
これに対応してきました。
しかしローバー自体の重量やサイズが大きくなり、
運用には仕方なく高いコストがかかってきました。
この問題に私たちは車輪の径を大きくすることで対応しようと考えています。
技術開発のリードをする吉田教授の研究によると高い走行性能を実現する上で、
キーになるのは車輪の径の大きさだ、ということで、
それによって、より効率よく走行性能を上げることを目指しています。
成功すれば少ない車輪数、シンプルな構造で、重量を抑えることができ、
ローバーの開発や運用コストを大幅に下げることができます。
そこで伊豆大島では、
これから作るプロトタイプモデルに適切な車輪径を選定するため、
いくつかのサイズの車輪を作成し走行試験を行い、データをとる必要があります。
が残念ながら現状、資金が潤沢にあるわけではありません。
サンプルの車輪はホームセンターなどで売っているウレタンフォームを、
自分たちで成形し作ります。これが結構タフな作業なんです。。
伊豆大島の実験まで残すところも少なくなってきました。
メンバーはこの活動とは別に仕事をしているため、
なかなか時間をとることが難しいのですが、仕事帰りや週末を活用し、
急ピッチに準備を進めています!
WLS金田






