 LINEで送る
LINEで送る島の子供たちによる耐久試験
2012/11/03 18:49
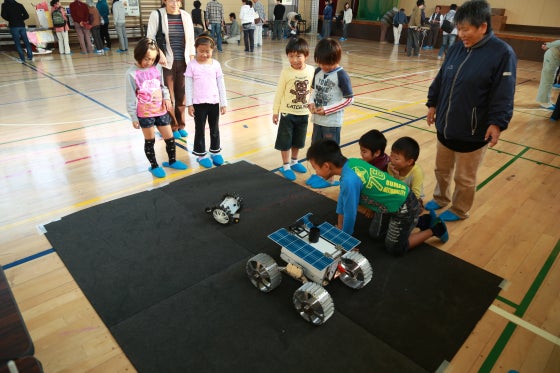
伊豆大島、北の山公民館でのローバー一般公開は大盛況のうちに終了! 今回の実験に参加していた、 様々な団体の無人探査車や無人飛行機が一同に集結した、 公民館の体育館はちょっとすごい光景でした。 我々のローバーたちも島の子供たちに大人気! ちょっとだけ操縦させてあげるつもりが、 みんなで代わりばんこに、飽きることなく遊んでいました。 普段、慎重に操縦している私たちと違い、 結構ワイルドに操縦する子供たちのおかげで、 今まで気づかなかったローバーの弱点がわかりました。笑 また体育館に集結したローバーをはじめとする無人観測ロボットの研究が、 近い将来、起こると予想されている伊豆大島の噴火の際に、 少しでも役立てば本当に素晴らしいなと、島民の人たちとふれあい感じました。 さてさて、それではこれから、開発するプロトタイプモデルのために 実験のデータをまとめ始めます! 皆さんもローバープロトタイプモデル開発のために、 ご支援よろしくお願いいたします。 WLS 金田











