 LINEで送る
LINEで送る▼はじめにご挨拶
菅野優と申します。
茨城県在住で、趣味でウィンドサーフィンをしています。
ウィンドサーフィンから着想を受けたロボットで海の環境改善ができるのではないかと考えました。器用ではありませんが、悩みながらも楽しく開発中です。
▼このプロジェクトで実現したいこと
海のマイクロプラスチックを回収するロボットを開発します。
~マイクロプラスチックとは?~
人の活動から出たプラスチックゴミは大量に海に流れ込み、波や紫外線で数ミリ以下と細かく分解され世界中の海に漂っています。動物プランクトン、魚、鳥たちが餌と間違えて体内に取り込んでしまっています。プラスチックはPCBなど有害物質を吸着する性質があります。生物に悪影響を及ぼす懸念があります。人間は海産物を食べます。他人事ではありません。それ以前に海棲生物に迷惑です。
プラスチックは長い時間がかかってもなかなか分解されません。一方で人間の生活には大変便利であるため大量に使用されては廃棄されています。海へ流入するプラスチックゴミは年々増えているそうです。
これらのゴミを回収するのには大変な労力とエネルギーが必要だと考えられます。でも自然エネルギーとテクノロジーで環境負荷なくゴミを回収できそうな気がするのです。
そんな自分のアイデアを試してみたいのです。
自ら動力を生み出して仕事をするロボットを作ります。
実現できると考える根拠をひとつずつ示しますと、
1)風が吹いていてもセイルとボード、キール(ダガーボード)があって、うまくウェイトコントロールができると、風下に流されずほぼ同じ場所をキープできます。
(動画は10分ほどかかります)
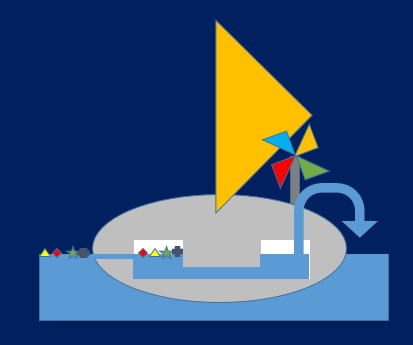
2)ヨット式浮体の上でセイルを返すと進行方向が逆になります。
浮体上に風車を載せると回ります(動力が得られる)。
今のところ風上には進めていませんが。
3)動力が得られると、浮体上で水汲み仕事ができます。
できそうな気がしてきませんか?
この、セイルをパタパタさせてスイッチバックの要領で浮体を往復させ、風下に流される分だけ風上に移動することでほぼ定位置をキープし、その浮体上で風車を回して動力を得て電力として蓄えたりするアイデアは特許取得済みです。
ひとまず本プロジェクトのゴールは、
・2016年度末までに
・湖で、風下に流されないヨット式浮体を作り
・周囲の水を取り込みつつ、風車の動力で水を汲み出し
・軽量小型のゴミを回収できる
という試作機を作り上げること、です。
今回はラジコンによる操作となります。
▼プロジェクトをやろうと思った理由
下でも述べますが、ふとしたことで知った世界の海のゴミ問題が衝撃的だったことと、自分のアイデアを活かせるかも、という気持ちからチャレンジしてみようと思いました。
魚介類が食べられなくなるかもしれないのも困りますしね。
私のアイデアのきっかけはというと、
ウィンドサーフィンは適度な風が吹いている時がとても楽しいです。でもいつも希望通りの風が吹くわけではありません。
いつもいい感じの風が吹いていればいいのに。
ただ地球は太陽のエネルギーを受けて、地表のどこかでは風が吹いています。天気予報を見ても、高気圧や低気圧が次々とやってきて等圧線の間隔が変わり、どこかでは風が吹きます。一緒に移動できればそこはいつも風があるのに。
最初はそんな妄想からでした。
話は大分変わって、
世界で自然エネルギーへの転換が進み、もちろん風力発電の設備投資も進んでいます。かたや日本では太陽光発電に集中し、風力発電はまだまだのポジションです。風況が安定せず、そもそもある程度風が吹かないと全く発電しないということで。
あれっ、どこかで聞いた話だな。そこで1つ目の閃きが起きました。
風の吹く場所をキープし続けられるなら話は一歩進むじゃないか。
ウィンドサーフィンのレースでは、シバーリングといってセイルに風を入れたり抜いたり、またはおもて裏に交互に風を受けて洋上のほぼ定位置をキープする乗り方があります。
これをロボット化するのです。風上に上りながらスイッチバックの要領で往復すればほぼ定点にいられそうだ、と。これに風車を載せれば発電設備になりそうだ、と。
ただし洋上で風車を回せたとしても今は陸上にエネルギーを送るのは簡単ではありません。そこで2つ目の閃きです。その場でできる仕事をさせるのです。たまたま本屋の世界地図を眺めていた時に、世界の問題を紹介している本が目につきました。海のゴミベルト。海流の行き着くところは大変なことになっています。例えば太平洋のミッドウェー環礁。ミッドウェー、プラスチックゴミ、で検索してみてください。
▼これまでの活動
2012年
セイルの操作で動いたり留まったりできる浮体式洋上風力発電設備のアイデアを着想。
2014年
上記着想について特許出願
2015年
浮体式洋上風力発電設備 で特許取得
RCカーのプロポとモーター/サーボと、あとはホームセンターや100均の部材を組み合わせて試作機を試行錯誤しながら作ってきて現在に至ります。
まだ風上に進んでくれるマシンはできていません。
▼資金の使い道
試作機の開発費用に充てます。
・周囲の水を取り込むタンク取付け
・風車の動力でタンク内の水をかき出す機構の取付け
▼リターンについて
・お礼のメールをお送りさせていただきます。
・セイルにお名前を記載させていただきます。
・浮体のデッキにお名前を記載させていただきます。
▼最後に
福島県楢葉町で生まれ育ちました。今は東日本大震災からの復興シンボルの一つとして浮体式洋上風力発電設備が設置されています。自分が風と関係のあるアイデアを持ったのは何かの縁でしょうか。せっかくなので押し進めていきたいと思います。いつかコラボできたらいいな、なんて考えてしまいます。
最新の活動報告
もっと見る
ラックに載せて高くすれば持ち上げやすくなるのか?
2019/02/18 12:10前回の投稿では、組み上げたものの踏ん張りが利かず船体を持ち上げられない、というところまででした(涙)。いろいろ考えたのですが、今あるものを削ったりして軽くする、というのは現実的に難しいです。水際で組んで引きずり下ろすことも検討しましたが、あまり船底を摺りたくない。で、地面レベルから持ち上げるから腰を大きく屈めてしまい力が入らないのか?少し高い位置で組み上げて、そこからセイルを立てて持ち上げればできるのか?を試すこととなりました。おなじみイレクターのパイプを"コ"の字型にし、真ん中に可動の突っ張り棒を追加。各脚にロープを渡して広がり幅を固定するという、最も手抜きな形状。4つ作って並べるとこんな感じ。ということで、組み上げて持ち上げてみました。重たいですが、何とか運べそうです。ゆくゆくは誰かに手伝ってほしい。 もっと見る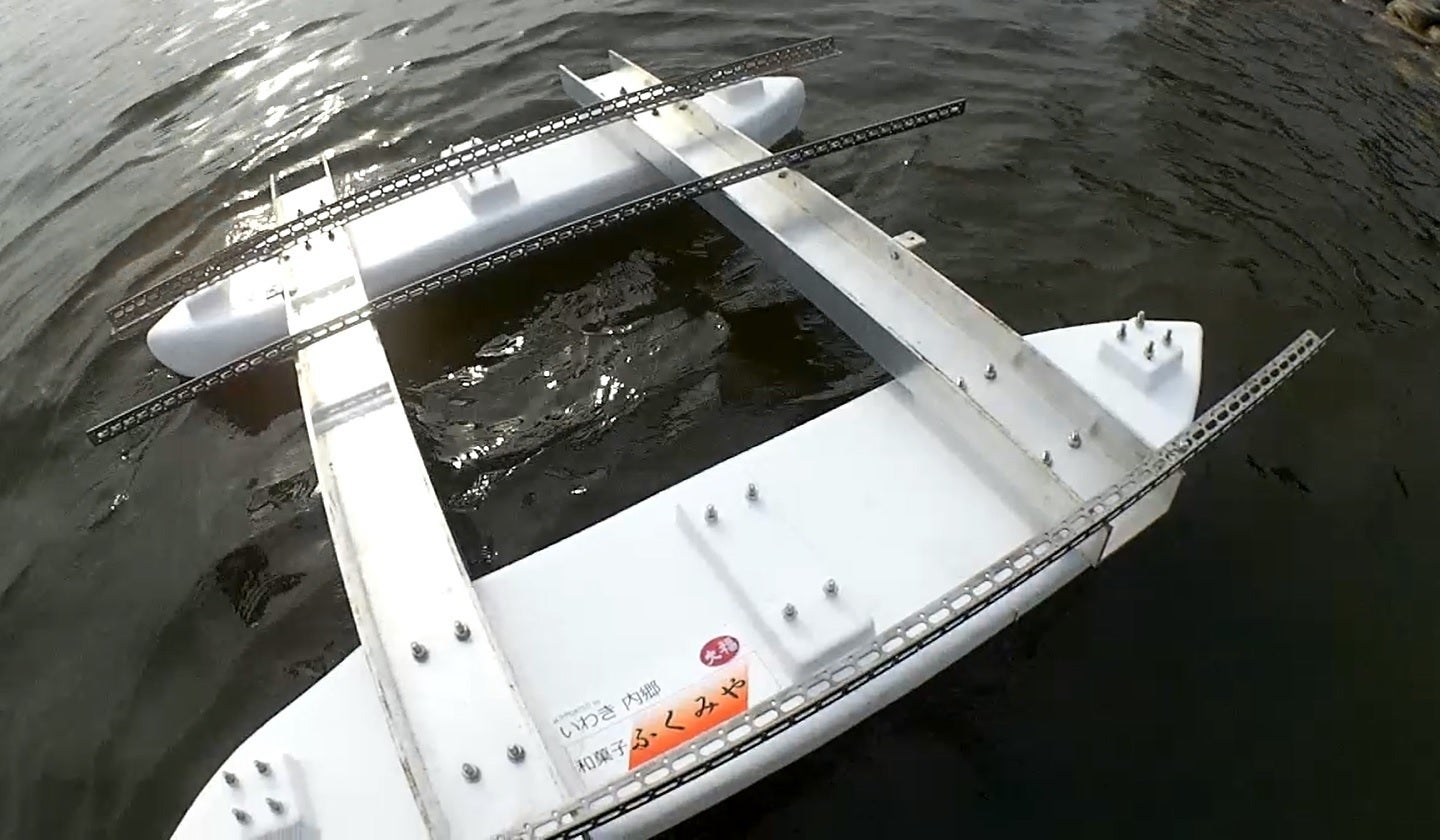
進水式を行いました。
2019/02/13 17:45新しく作った船体を初めて水に浮かべる時、進水式を行います。水の神様に航海の安全、無事を祈ります。本船もそれに則り進水式を行いました。まずは陸上で組み立てます。(車で運ぶため、都度、組立てとバラしが発生します)船体にはご支援いただいております【福島県いわき市内郷の和菓子ふくみやさん】のラベルを貼ります。ご支援ありがとうございます。寄ったらまた大福買います。 ご支援者様のラベル① ご支援者様のラベル② セイルまで立てたところそこまで組み立てたところで、大変なことに気づいてしまいました。セイルがついていない状態の時に、船体は自分で持ち上げられる重量であることは確認していました。軽くはなく、感覚的ですが、30~40㎏はあるかもしれません。ですが、セイルを取り付けてみると、踏ん張る際の頭の位置とマストが干渉してしまいます。力が入らず持ち上げられません。結局、セイルをひとまず取り外し船体部だけでの進水式となってしまいました。<二礼二拍手一礼>ちなみに私(体重80㎏超)が乗っても沈むことはありませんでした。いろいろやりようはあると思いますが、考えます。 もっと見る
船体に制御系を仮組みしてみました
2019/01/31 18:53ヨット式のロボットを自動で動かすために、電子工作等でおなじみのArduinoというマイコンボードを使えるように勉強しました。当初は電子工作なんてしたことなかったし、自分がするとも思っていませんでした(^^; とある会合でロボット研究会とか同好会の人と接触する機会があり、そこから自分で調べたり、本を買ったりして進めてきました。途中は端折ってしまいますが、ArduinoにGPSセンサやコンパスセンサ、風向を得るために使用することにしたポテンショメータなどを組み合わせまして、風向に対する水上の目標位置に近づけるように、セイルやラダーを動かすサーボモータを操作するプログラムも自分で組めるようになりました(1年半はかかりましたかね)。以前に準備した船体に制御部であるArduinoボードを仮組みしてみました。本日のデモ動作ではサーボを定期的に動かしています。実際はGPSやコンパス、風向計からの値を計算し、目的ポイントに近付くための動きをさせます。上手くいきますかね?あっ、センターボードとラダーは別途付きます。 もっと見る







コメント
もっと見る