PVのセットリストができるまで
2021/01/14 19:28

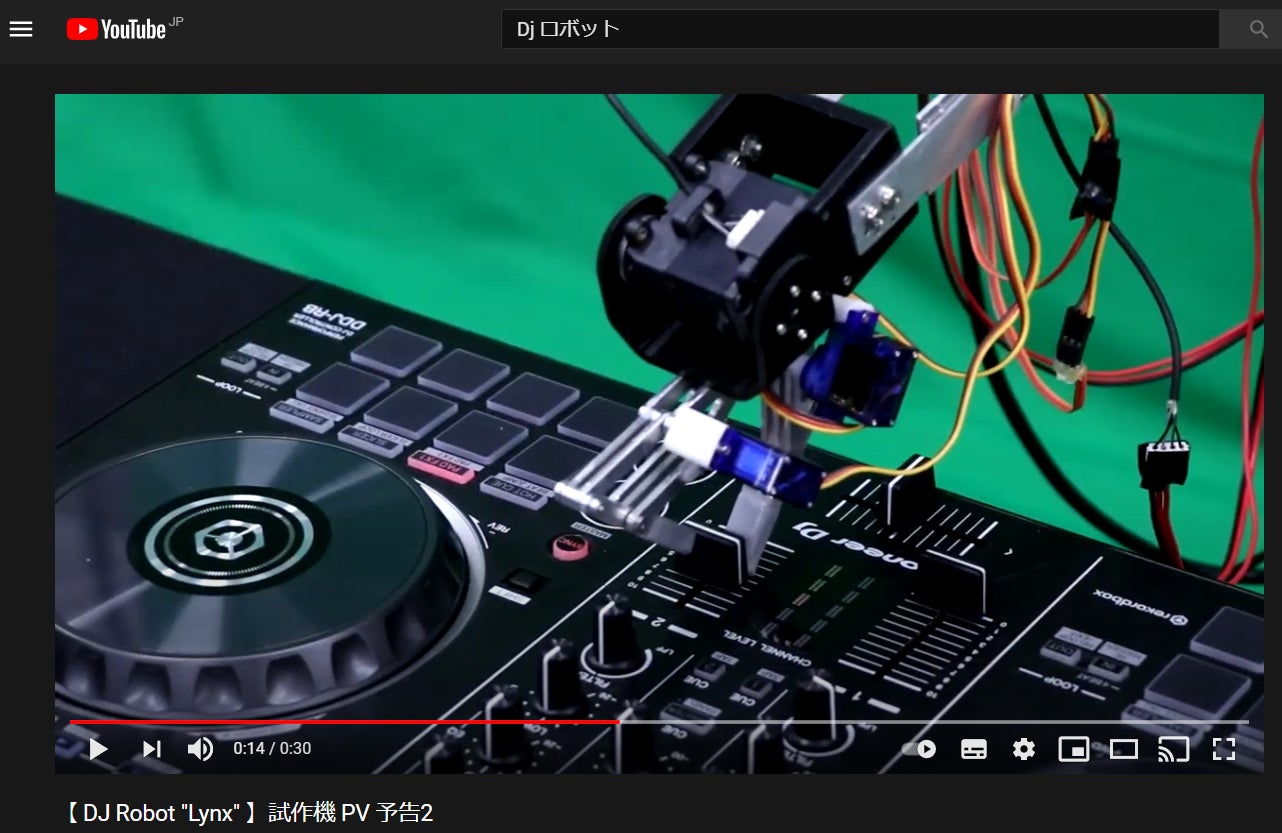
はじめまして本プロジェクトでは音楽関係のサポート(DJに関する情報提供、音楽の選定等)を担当している渡辺と申します。 趣味でDTMをしており、こんな曲を作ったりしています。https://soundcloud.com/89wa89wa/tracksさて、早速ですがLynxのPVの予告編はご覧頂きましたでしょうか?現状、Lynxは自分で選曲する機能が未開発のため今回のセットリストは私が組んでおります。1.intro2.Laszlo - Fall To Light3.Futuristik - Little Bit (feat. Sethh)4.Cartoon - Why We Lose (feat. Coleman Trapp)5.Kasger - Out Here6.Dirtyphonics - AnonymousLynxの近未来感とPVのカッコよさを増幅させるためにテンポが速く疾走感のあるDrum & Bassと呼ばれるジャンルの音楽でセットを作成しました。今後は自分の知識を活用しLynxが自分で選曲するアルゴリズムを開発していきたいと思います。※開発予定アルゴリズムのキーワードをチラ見せ[離散フーリエ変換・基本周波数から倍音解析・テンポ解析・各項目に対する機械学習]これから先、開発を進めていくためにも皆様のシェア並びにご支援のほど、是非よろしくお願いいたします。