動作テスト①
2021/03/24 16:04
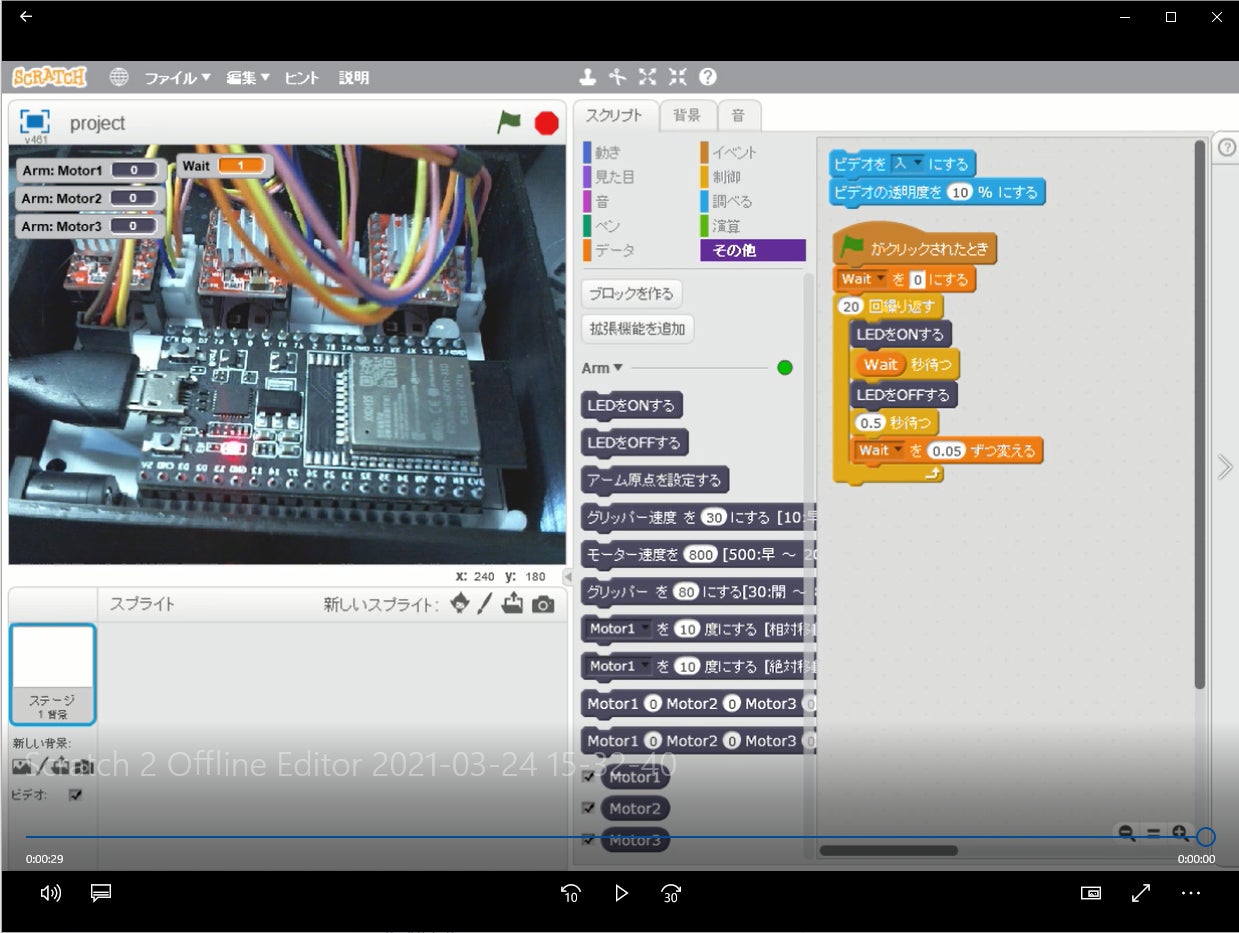
現在、Arduinoプログラム開発(ESP32用)、Scratch拡張機能プログラム開発(ESP32用)の動作テスト、デバッグ、改良も順調に進んでおり、3月のスケジュールは予定通り完了する見込みです。活動報告 動作テスト①Scratch2.0でESP32用の基板をビデオ撮影し、LEDが少しずつゆっくり点滅するようにON/OFFを制御しています。



現在の支援総額
93,430円
目標金額は300,000円
支援者数
12人
募集終了まで残り
終了
このプロジェクトは、2021/02/19に募集を開始し、 12人の支援により 93,430円の資金を集め、 2021/03/31に募集を終了しました
現在の支援総額
93,430円
31%達成
目標金額300,000円
支援者数12人
このプロジェクトは、2021/02/19に募集を開始し、 12人の支援により 93,430円の資金を集め、 2021/03/31に募集を終了しました
現在、Arduinoプログラム開発(ESP32用)、Scratch拡張機能プログラム開発(ESP32用)の動作テスト、デバッグ、改良も順調に進んでおり、3月のスケジュールは予定通り完了する見込みです。活動報告 動作テスト①Scratch2.0でESP32用の基板をビデオ撮影し、LEDが少しずつゆっくり点滅するようにON/OFFを制御しています。
ARE-ARM1のステッピングモーターの速度UPをやってみました。速度UPによる脱調を防ぐため、だんだん加速し最高速度で等速、移動位置に近づくうちに減速という動作にするため台形速度制御を追加しました。画面左側の動作が速度を上げた動作、画面右側が速度を落とした動作です。どちらも滑らかに動作しています。Scratchから簡単にアームの移動速度を指定出来るようになります。








Abilityさんへアンコール
