 LINEで送る
LINEで送る
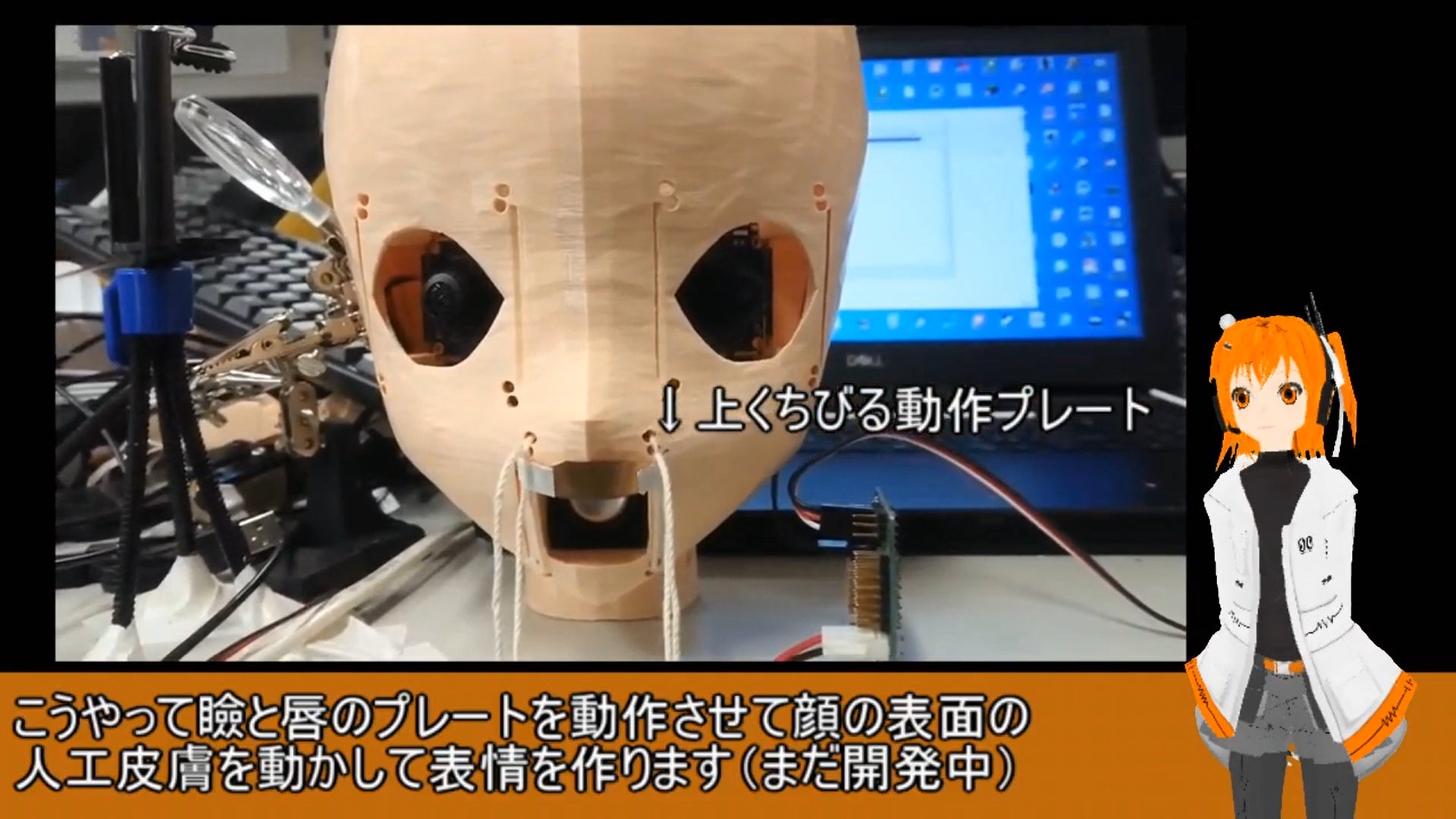
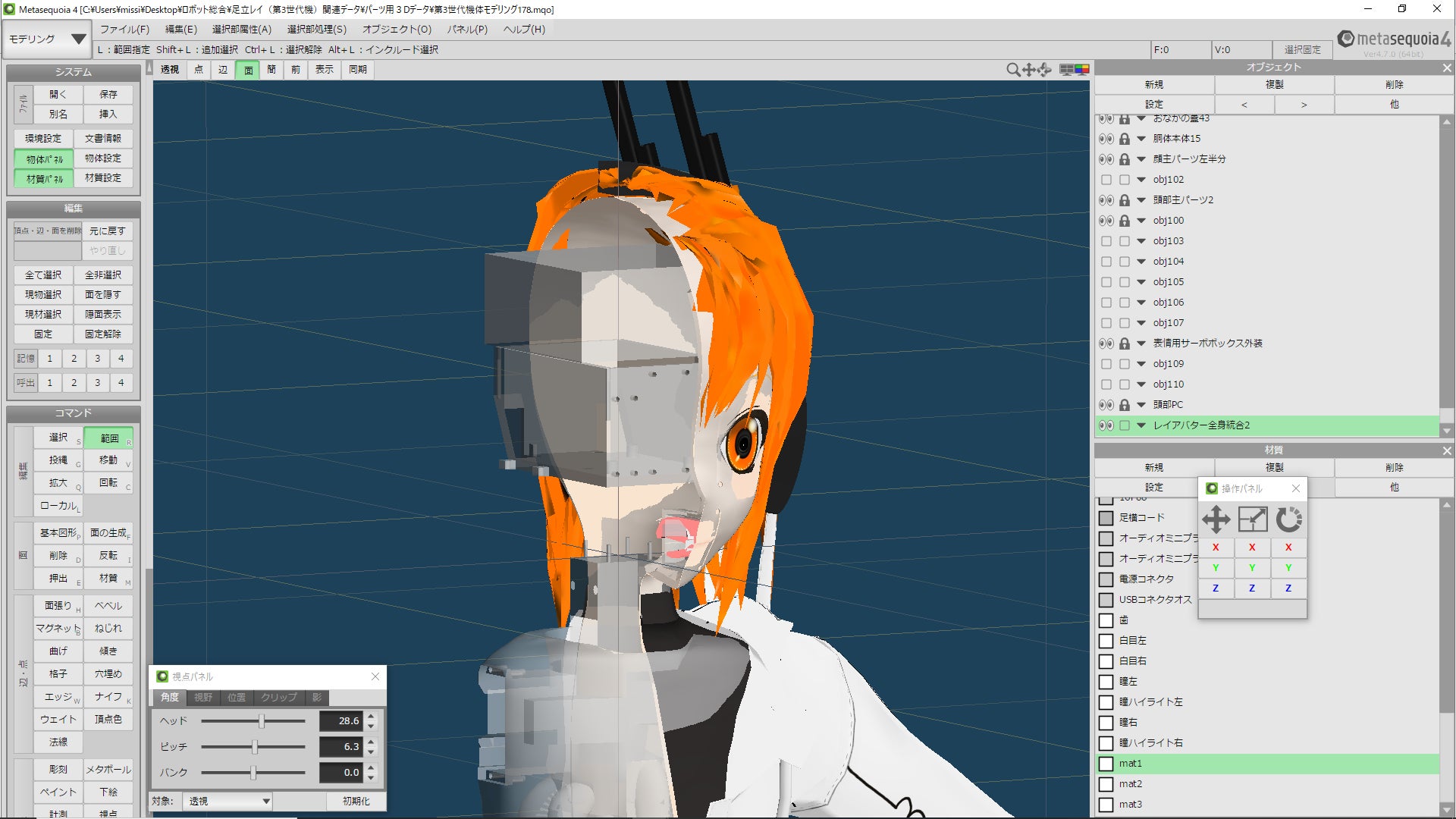
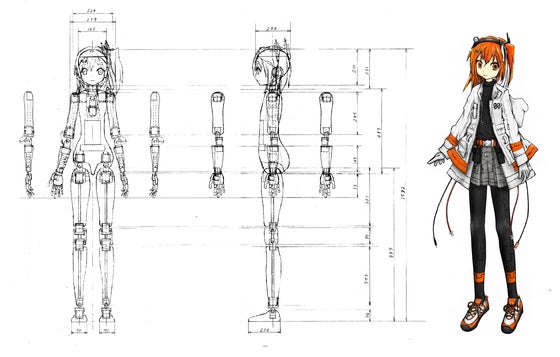
こんにちは。久しぶりに進捗報告です。現在主に脚部の開発をしています。こんな感じこの足、どういう作戦(設計思想)かというと、「既存の、パワーウェイトレシオ(重さに対するパワー)の高いサーボモーターで、少女型ロボットのプロポーションを崩さないで済むぎりぎりの大きさの物をクラスター化(束ねて強くする)して使う事で、目標のスペックを実現しつつ開発コスト(期間)を現実的なものにする」という作戦です。クラスター化は、よくロケットのエンジンなんかでも見る手法です。既に開発済みの信頼性の高いエンジンを束ねて使う事で出力をアップできるので、失敗のリスクが低く、開発コストも低い。http://spaceflight.nasa.gov/gallery/images/station/crew-10/html/jsc2004e45202.html自動車とかのエンジンの直列4気筒とかの仕組みとも似てますね。どちらかというと、エンジンそのものを直列に並べてる感じですが。https://commons.wikimedia.org/wiki/File:BlocoMotor4CilindrosAluminio.PNGロボットではよく、「ダブルサーボ」なんて呼ばれたりします。要するに一つのサーボモーターで足りない力を、2個つなげて倍にしてやろうというやり方です。開発開始から現在まで、歩行を確実なものとするため、研究室の教授と新型サーボの開発に取り組んできたのですが、特にここ半年ちょっと、コロナが流行ってからは大学に入構制限がかかって学生はなかなか研究室に行けない、教授は遠隔授業の準備が忙しくなるなど結構ダイレクトにいろいろ影響が出てしまいました。最近は院生は割と入れるようになったのですが。それでも結構要素的には開発が進んでいて、組み合わせれば500kgf.cm,0.07sec/60°,シリアル(RS485)くらいのサーボができそうなところまで来ています。しかしこういうパーツ、ロボットに組み込んで作っていくには、「今」、スペックや大きさが等が確定していないと、そもそも設計がはじめられず、その開発完了を待ってから始めては完成がいつになるか分かりません。そこで悩んでいた7月頃に出たサーボがこれです。KRS-9004HV 近藤科学の新型サーボで、トルク90.9kgf・cm。大きさは2号機の足にも使っている6003HV(67kgf・㎝)と全く同じながら、トルクアップしています。これならなんとかうまくやったら使えるんじゃないかと考えました。既にあるサーボなら、それをどう使うか、どう配置するかに集中するだけで開発コストが大幅に下がります。それでも1.4倍程度では、単体だと明らかに足りない。前回の様に力不足で補助付きで歩行モーション程度になるのは目に見えています。そこでダブルサーボを考えました。が、普通に横に連結すると、この足だと横にはみ出てしまいます。そこでツイッターで色々検索していたのですが、ましろプロジェクトさんが肩サーボにギアで出力軸を直結してダブルサーボにしてる動画を見たので、これなら積み方次第で体型を崩さずダブルにできる!と思ったので真似してみました。こんな感じに出力軸をギアで連結してトルク2倍。おまけにこの方法なら、ダブルと言わずトリプルも可能です。特に膝は、恐らくダブルでもトルクに不安が残ります。ダブルで181.8kgf・cm,トリプルで272.7kgf・cm。トリプルでも不安ではありますが、まぁ何とかなるんじゃないかとは思えるくらいの数値です。あと1、2年程度でとりあえず完成させられることが現実的で、歩くためのスペックも満たせる事が、万全とは言わないまでも期待できる。という事でこのKRS-9004HVを使っての脚部製作を決意、開発進行中という運びになります。それでとりあえず7個購入それで実際にモデリング、組み上げ足首のダブル・ダブルサーボユニット。配置を工夫してなんとか詰め込みました。正直とてもすごいギリギリ。ちなみに気づいた方もいるかもですが、2年前の試作足一号にはついてなかった指が付いてます。これは足立レイのアバター用3Dモデルの足から作った結果です。膝のトリプルサーボモーターユニットそれでこれが実際に作ったユニット三連装でトルク3倍という脳筋仕様。ユニットとしての性能はトルク272.7kgf・cm,回転速度0.23sec/60°,重量400g。2号機の膝に比べると約4倍のトルク。スペース的にはクアッド(4連装)までは行けそうなのですが、今のところ見送り。これでもたりないようならやるかも・・最近大きく変わった3Dプリンター系の事情としては、これ。↑のトリプルサーボモーターユニットにも使っているポリカーボネートの3Dプリンターフィラメント。これで特に強度や耐熱性が必要なサーボモーター周りのパーツを作り始めました。強いです。ただ、反りがけっこう激しいので扱いは難しいです。とりあえずこれでギアが持たなかったりしたらもっと強いフィラメントを使ってみようと思います。それでも無理なら金属で。こういう強度が必要で金属でしか作れなかったような部品を樹脂の3Dプリンターで作れるようになってきたの、すごい便利。足の膝から下構造モデルでまとめて透視した図足の本体(母材)の部分は腕や胴体と同じPLAの肌色フィラメントです。ポリカーボネートの強度と耐熱性を生かしてサーボを直接固定、そのポリカを挟んでPLAで覆う事でシェル構造にしつつ温度による軟化問題もクリアするという計画。印刷中の足。やっぱりPLA(ポリ乳酸)はすごく扱いやすくていいですね。下腿のパーツは全身で2番目に長いパーツ(57㎝)なので、結構時間がかかります。現在試作3個目ですが、もうひと改良必要そう。ノズルをカーボンファイバー入りフィラメントが使えるようにステンレスの、径0.6㎜のものに交換したのでその効果もあって若干印刷スピードは上がりました。精度的には問題無さそう。あと最近充填方法をハニカムからジャイロイドに変えてみました。印刷速度も速いし頑丈だし、内部構造も縦にも横にも均一化されてすごく都合がいい。これ最高の充填方法かもしれません。ジャイロイド構造。ジャイロイド自体、1970年と比較的近年になって発見された構造らしいです。加工してジャイロイドの内部構造にするのは困難。でも、50年たった今、3Dプリンターなら無理なく造形できる。本当に何が何に役立つか分からないものです。科学の勝利!全体としては足の出来はいまこんな感じです。次は膝から股関節、ふとももの部分を作っていく必要があります。さらに、サーボモーターの変更に伴い股関節ヨー軸(ぐりぐり踏みつける時に使う軸)の取付穴も変更、また電圧の変更に伴い載せるバッテリーも1つ変更となるため、新たに胴体2号を作る必要がありそうです。この辺りがあと2、3か月くらいで出来上がればいいなと思っています。右脚がうまくいけば基本的にはそれを反転した形で左足の3Dモデルを複製&プリント。それで両足そろえる計画です。その次は残った頭部の艤装、配線等等・・ですね。技術的な観点からいえば、ちゃんと余裕のスペックのある新型サーボを開発しきってから搭載するのがベストであると思います。しかし、プロジェクトとしては単に技術開発としての側面だけでなく、多分ある意味(芸術)作品的側面もあって、まずはある程度の期間内に現実的な所で達成しなくてはならなくて、そうでないと次の目もない。開発としてのベストがプロジェクトとしてのベストとは限らない。しかしだからと言って、無謀な仕様で無理に作っても、実用のロボットとして意味がない。そもそも動かすものがででかい精密機械なので無理なもの完成できない。という事を考えるとどこかで折り合いをつけないといけない。難しい所ですが、なんとか技術的な観点からも充分歩行の実現可能性を残しながら、開発期間的、費用的、外観的にもなんとかなりそうな方向で進められたのではないかと思います。(7月に9004が出て、多分、よかった・・性能的な意味だけでなく、ある意味踏ん切りがついた)また順次ツイッターやyoutube、ニコニコ等で作業放送したりすると思うので、よろしくお願いします。