脚部サーボ・腕等の進捗【動画】
2018/11/09 20:28

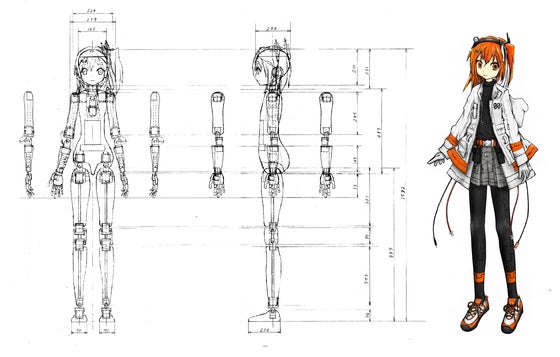
こんばんは。最近ハードウェア系の進捗をちゃんとまとめて報告していなかった気がするので、現状のところの動画を作ってみました。こちらです!ニコニコ↓https://www.nicovideo.jp/watch/sm34147821現在のところハードウェア系としては腕を完成させつつ脚部サーボの開発に取り組み、頭部の詳細な設計とモデリングを進めようというところです。ちなみに動画のレイの声ですが以前作った音源を使ってUTAUで喋らせてます。megpoid talkのを下地にしてるので一から作るよりは簡単です。ただやっぱりボイロとかに比べると大変。音源の方でもアップデート予定があったりするので多分そのうち。最近youtubeとニコ動で同時に作業配信したりもしてます。youtubeの方、自動でアーカイブしてくれて便利です。作業動画なのであんまりおもしろくないかもしれませんが、こんな感じでやっていますので興味がありましたらどうぞ https://www.youtube.com/watch?v=b5NQ6QhobWUいくつか大きめの写真も置いておきますではまた~











