 LINEで送る
LINEで送る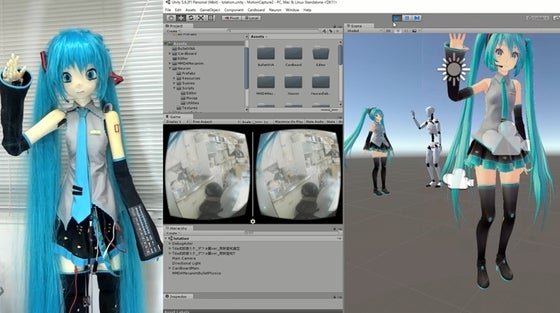
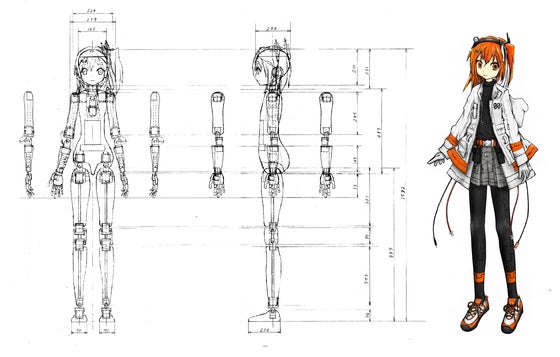
お久しぶりです。ここ1年半ほど取り組んでいた、モーションキャプチャとVRとロボットを用いた、キャラクターアバターシステムが一応完成したので動画にまとめてアップロードしました!要するに現実世界で「俺がミクだ!」ができるシステムです。 レイとは結構関係があって、このシステムで制御に使っているPCはレイ用のになります。動画内でも結構レイ(の絵)と関連事項は出てくるので是非チェックしてください! サーボの配置等共通点は2号機であるミクとかなり多い予定ですので、ここでソフト面をどんどん開発していこうという感じです。レイが要求スペック通り完成すれば、立ったり歩いたりしながらこれができるはずです! ニコニコ http://www.nicovideo.jp/watch/sm32498906 youtube 恐らくですが人型キャラクターに対応した声に変換しつつ視覚もVRで共有して姿かたちも当然キャラクターでモーションキャプチャで全身動かせるっていうシステムは世界で初めてなんじゃないでしょうか! このシステムの開発に当たっては大学の研究室の4年生と、特にpsy39さんという方にプログラム面でほとんど全面的に開発をしていただいています。ここで今一度感謝を示したいと思います。このシステムの開発では僕は主にシステムの開発方針や仕様決めとハード的な見地からのプログラムとの調整やら実機での実験なんかをやってます。 このシステム、VR用のHMDやらをつけて実際に体験してみないと本当のところの感じはわからないと思うのですが、すごい没入感があります。普通の3DCGのVRでもある程度はそうなのですが、見えるものや聞こえる音がリアルタイムのリアル世界のものなので、3DCGのVRとはまた違った現実感のようなものがあります。というか、現実感というかある意味現実でした。 なんというかミクのロボットの体の中に閉じ込められちゃったというか入っちゃったというか、もうこれ俺の体だろみたいなそんな感じで、現状その場から動けないせいか研究室がとても広く見えて世界が果てしなく感じてしまいます。 しかし歩き回れるロボットになれば、また違う世界が見えるはずです。個人的にも、ぜひこのまま歩いて行くのを体感したい・・と思ってます。 ロボットに実装する(主にはソフト的な)システムとしては2号機で現在のところ最大のものになっています。現在も開発継続中ですので今後も何かこれを使ったものを発表するかもしれません。 具体的にこれを何に使うかというと、エンターテイメントロボットでの舞台やステージ上でのインタラクティブな使用を想定して開発しているのですが、最近にわかに流行りだしたバーチャルyoutuberならぬロボットyoutuberみたいな用途にも使えるかも!と最近思い出しました。バーチャルでしか会えないものにリアルで接したい、あるいは中の人がキャラクターの体が欲しい、っていう欲求はきっとあると思うんですよね。そんなのを意識して開発していきたいです。 ではまた!