
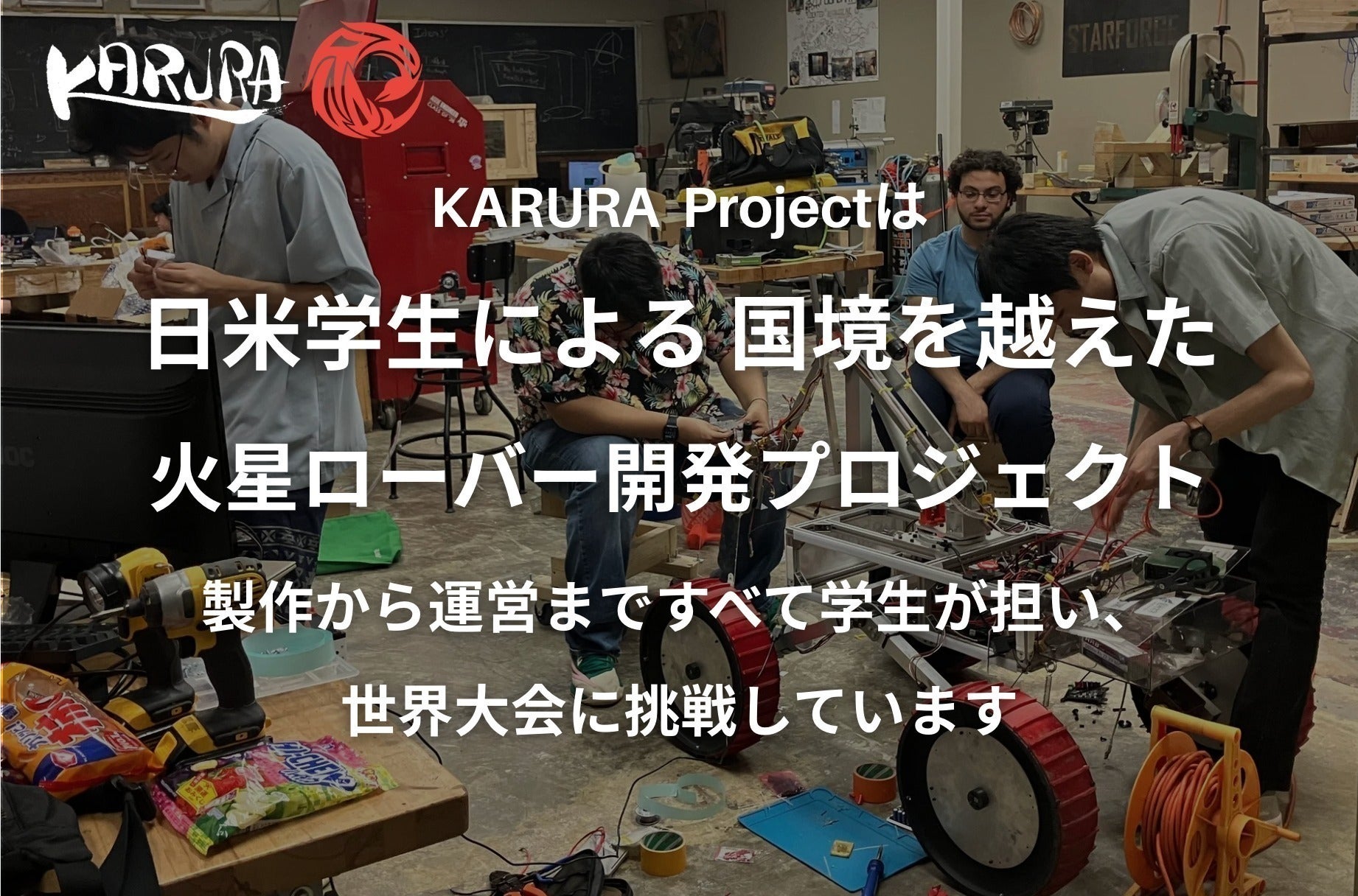
私たちKARURAプロジェクトは、宇宙探査やロボット開発を志す学生たちが、日本全国やアメリカから集まり、模擬火星探査ローバーの開発に取り組んでいる学生団体です。
そもそも宇宙探査ローバーとは、火星のような惑星の地表を走りながら探査を行う車型ロボットです。
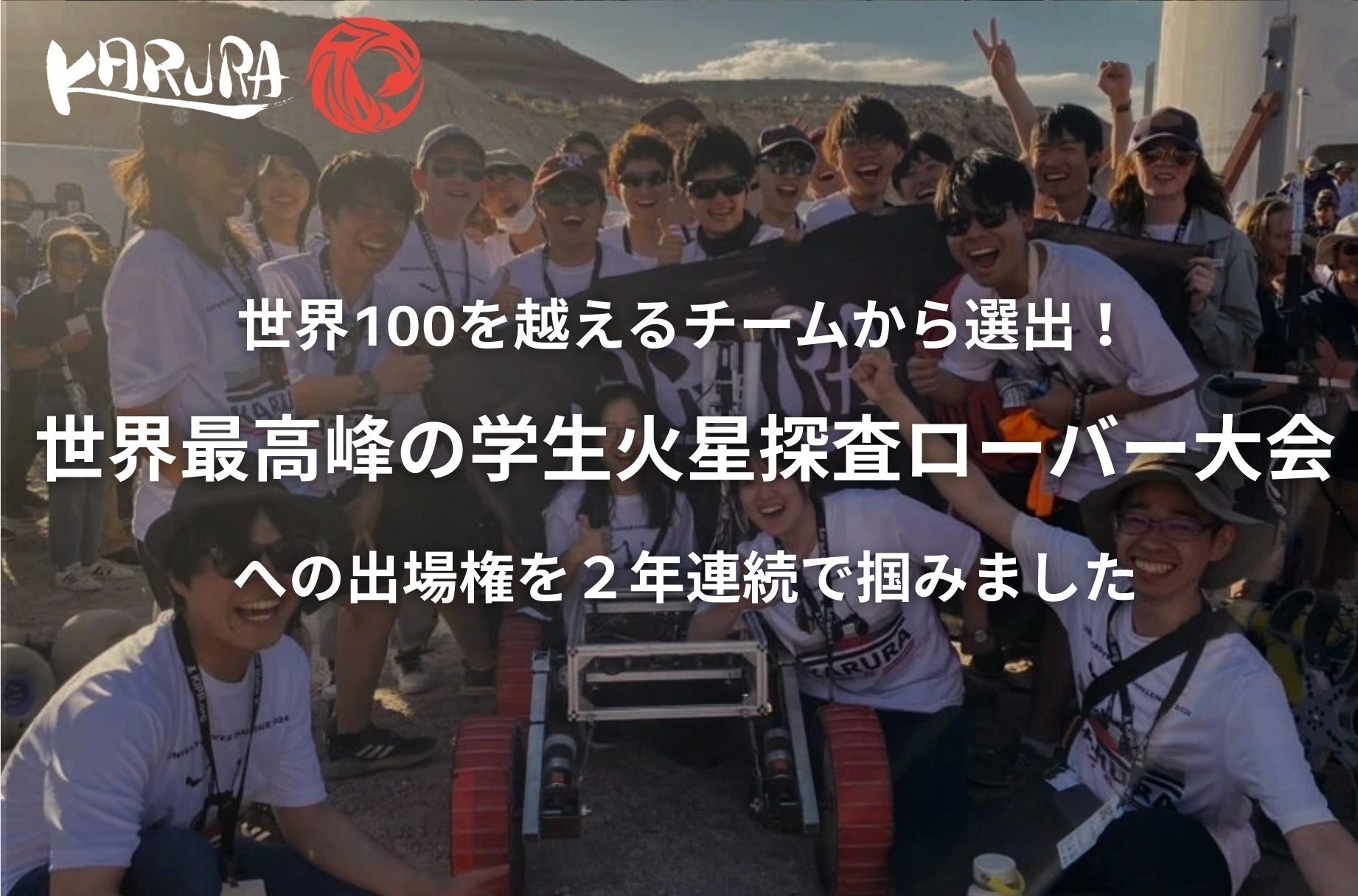
私たちは、世界最高峰の学生ローバー大会「University Rover Challenge(URC)」に挑戦しています。2024年には、日本から初、そして国際チームとしても初めての決勝出場を果たしました。さらに今年も、世界中の学生チームがしのぎを削る厳しい審査を突破し、2年連続での出場権を獲得しました。
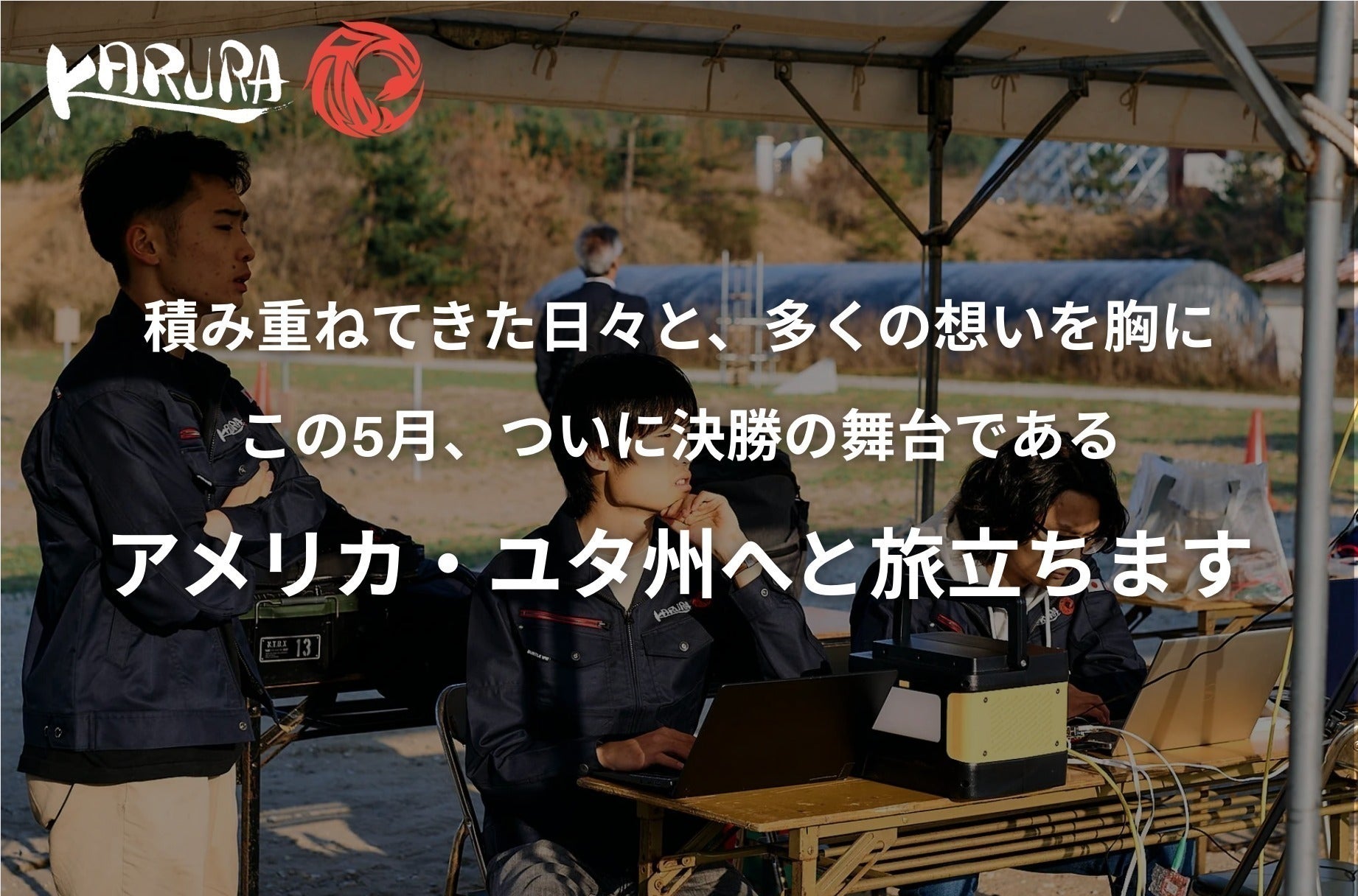
 大会は、アメリカ・ユタ州にある火星実験フィールドMars Desert Research Station(MDRS)で毎年5月ごろ開催されます。
大会は、アメリカ・ユタ州にある火星実験フィールドMars Desert Research Station(MDRS)で毎年5月ごろ開催されます。
ここは、「地球で最も火星環境に近い場所」とも呼ばれており、NASAも訓練のために使用しています。
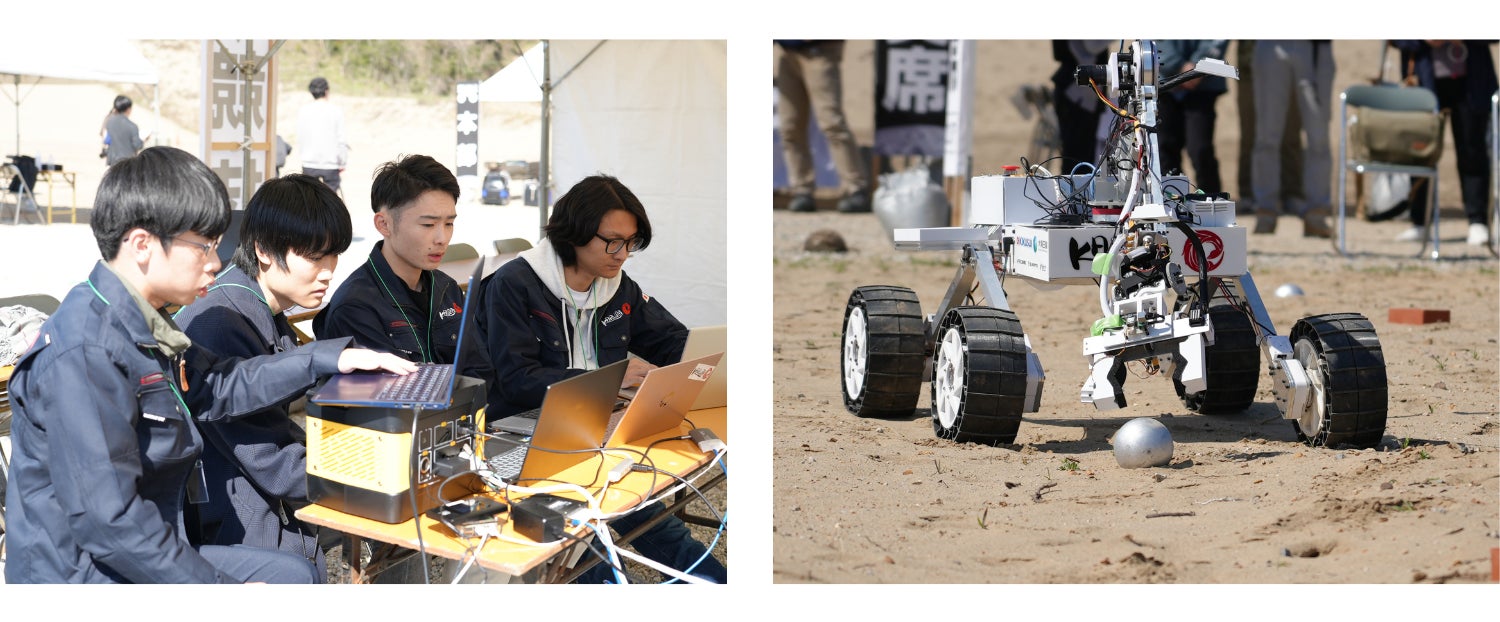
大会では、火星探査を想定した4つのミッションが課され、実際の火星ローバー運用に必要な技術力が試されます。高い走破性を持つローバーや、安定した通信システム、高性能なロボットアームや生命の有無を調べる科学機器すべてを、自分たちで設計・製作・運用して挑みます。

昨年大会では、回路の接触不良によりアームが動かず、自律走行ミッションではGPS座標を取得できないなど得点が伸びませんでした。また、砂漠会場の強い直射日光によってオーバーヒートが発生し、ローバーが本来の性能を発揮できない場面もありました。極限環境での運用の難しさや、世界大会の厳しさを実感した1年目でした。
当時は、まずは大会に参加し、現場を経験することが大きな目標でした。しかしその経験を経て、今年は“参加”から“戦う”フェーズへと移り、設計を見直し新ローバーを開発、各ミッションに向けた検証や練習を重ねてきました。
URC2025では、ローバーの性能を最大限に発揮できるよう、チーム一丸となってベストを尽くします。

数年前まで、宇宙開発は国際宇宙ステーション(ISS)をはじめ国を超えた協働が盛んに行われていました。しかしここ数年はISSの運用期限が迫る一方、各国による独自の宇宙ステーションの開発が行われてきているなど、国際的な宇宙開発は縮小傾向にも見えます。
様々な国の技術、アイデア、文化を集め国を超えた宇宙開発を行うことで、決して一国では実現できないミッションを作り上げ、実現させることができると私たちは考えています。
同じ志を持った学生が国を超えたチームを作り火星ローバーの製作に挑戦する。そして早くからグローバルな宇宙開発を経験した私たちが、将来の世界の宇宙開発を担っていきたいと考えています。

2022年のチーム結成から約2年半、ローバーの設計・機体製作・回路設計・ソフトウェア開発・科学探査・現地での運用まで、すべてを学生の手で実現。発足1年半の初エントリーながらURC2024に出場を果たしたほか、JAXA「宇宙探査フィールド」や鳥取県月面実証フィールド「ルナテラス」での実証実験を行うなど、数多くのマイルストーンを達成してきました。このような実地での経験を通して、“実践的な技術力”と“チームで動く力”を磨いてきました。
2025年3月には国内大会「鳥取ローバーチャレンジ(TRC)」に出場し、URC2025に向けた機体の改良点や、やり直しのきかない“大会本番”の難しさを痛感しました。
トラブルに直面するたび、原因を突き止め、改善策を議論し、対応してきました。その積み重ねが私たちを支えています。
しかし、大会に出場するうえで、どうしても避けられないのが資金の壁。特に、高い技術と情熱を持ちながらも、金銭的な理由で現地に行けないメンバーが出てしまうのは、チーム全体にとって大きな損失であると同時に、将来を担う人材の成長機会を失うことにもつながります。
本気で、世界に挑みたい。その想いを形にするために、私たちは遠征費の一部をまかなうクラウドファンディングに挑戦します。

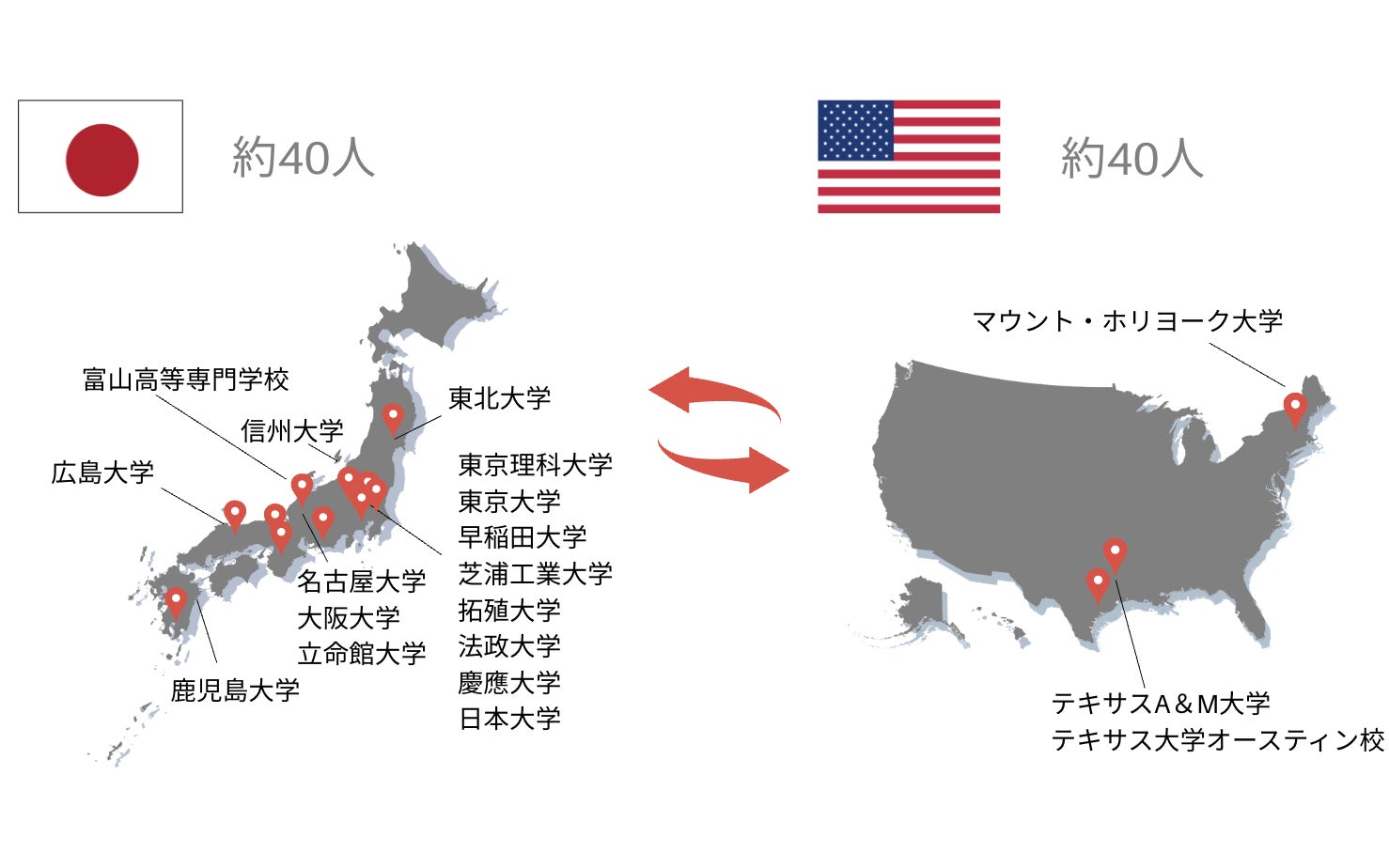
KARURA Projectは、日本とアメリカから集まった、宇宙、ものづくりへの情熱を持つ約80名の学生から構成され、日本国内では東北から九州まで、全国各地でメンバーが活動しています。多様な専門分野とバックグラウンドを武器に、国際的かつ遠隔拠点でのローバー開発という、前例のない活動に挑戦しています。
KARURA Projectでは、ローバーの製作、生命探査手法の開発、チーム運営まで学生が担い、エンジニアリング、サイエンス、ビジネスという3つのチームに分かれて活動しています。
エンジニアリングチーム
ローバー機構の製作やプログラムを担当。精密な動作を要求されるミッションと大会会場の過酷な環境に対応するため、技術開発やローバー製作に取り組み、チームの技術的中核を担います。
サイエンスチーム
生命探査ミッションの手法検討と探査機器開発を担当。生命の定義という根本的な問いから実際の機器開発までを幅広く担い、理学と工学の知識を融合させた活動をしています。
ビジネスチーム
資金調達、広報、クラウドファンディングの企画・実行など、チームを運営面で支えます。このチームは、多くのエンジニア、サイエンスのメンバーが兼任しています。挑戦を広げるため、自ら発信し、支援を募る――その姿勢も、私たちの強みの一部です。
それぞれの専門分野への情熱を持った学生たちが力を合わせ
独自のローバーをつくりあげています

KARURA2025ローバー紹介動画(大会審査動画)
↑↑↑私たちの技術を5分間にギュッと詰め込んだ動画です!ぜひご覧ください↑↑↑








各SNS紹介
各SNSでは、日々の活動報告、イベントの様子、メンバーインタビューやプロジェクトの裏側など、リアルで親しみやすい情報を発信中です。ぜひ私たちの活動をチェックして、応援やご意見をお寄せください。
皆さまの声が、次なるステージへの一歩となります!
X・Instagram
![]()
公式HP
【メディア掲載】
2023.07 日本経済新聞 鳥取砂丘に月面実証フィールド 県、宇宙産業創出へ点火
2023.09 鳥取メディア複数 鳥取の月面実証フィールドルナテラスでの実験について
2024.05 富山新聞 富山高専のメンバー中心に一面に掲載
2024.05 宇宙系VTuber宇推くりあ様とコラボ 特別配信を開催
2024.09 鳥取メディア複数 鳥取の月面実証フィールドルナテラスでの実験について
2024.09 NHK 団体紹介、鳥取実験が全国放送
2024.11 朝日中高生新聞 国境を越え自由に宇宙開発を 火星探査車の開発に取り組む国際学生団体「KARURA」
2025.03 【強豪チーム「KARURA」を取材】会場は鳥取砂丘近くにある月面実証フィールド「ルナテラス」 宇宙を目指す学生たちの戦い「鳥取ローバーチャレンジ」
他
【展示会出展・学会発表等】
2023.2 国際宇宙産業展
2023.5 ローバー展示@日本科学未来館
2024.3 未来宇宙産業フォーラム登壇
2024.6 宇宙漫談 in Tokyo登壇@日本橋 Cross Tower
2024.9 Maker Faire Tokyo 2024出展@東京ビックサイト
2024.9 第42回日本ロボット学会学術講演会 口頭発表
2024.9 日本惑星科学会誌第33巻第3号解説記事掲載
2024.9 生命の起源と進化学会夏の学校2024 ポスター発表
2024.9 日本宇宙生物科学会第38回大会口頭発表(学生優秀発表賞)
2024.11 第68回宇宙科学技術連合講演会口頭発表・ポスター発表
2024.12 JAXA主催 金属AMワークショップ 登壇
他
最新の活動報告
もっと見る
【CF終了まで残り1日!】大会報告「Science Mission」
2025/06/09 13:59KARURA を応援してくださっている皆様KARURAプロジェクト クラウドファンディングを応援いただき、ありがとうございます。遂にクラウドファンディング最終日となりました!現在68名の支援者様から合計833,111円のご支援をいただいております。皆様からの応援とご支援に心より感謝申し上げます!今回の活動報告では、大会の3日目に行われた「Science Mission」についての概要説明と私たちKARURAの結果を報告いたします。Science Missionサイエンスミッション(生命探査ミッション)では、ローバーに搭載されたカメラ屋実験機器を用いてサンプルリターン地点を決定・サンプルを採取し、その科学的妥当性を考察します。また、ローバーでの探査終了後、審査員へのプレゼンテーション及びディスカッションを行います。私たちは今回、カメラによる地質探査、Micro Imaging Device (MID) による顕微観察、蛍光反応検出器を用いた有機物検出を武器に大会に臨みました。↑蛍光反応の様子どんな有機物が検出できるかもわからない環境で探査を行うため、検出可能性とスピードを重視した検出方法を採用し、実験や考察、練習を重ねることで効率的な検出・進行を目指しました。↑蛍光反応検出器で上の蛍光反応の様子を撮影した様子(右) 蛍光強度を定量化した様子(左)直前までローバーでの操作・プレゼンテーションの練習を重ね、秒単位の綿密な計画を立てて臨んだミッション本番では、当初は順調に進んでいたものの、ローバー内実験用のドリルに異常が発生、蛍光反応検出器・MIDを用いた実験・観察ができない状況に陥りました。すぐさまカメラでの地質探査に注力しましたが、その後ローバーとの通院が断絶、その時点で得ている状況でのプレゼンテーションを行うこととなりました。↑ローバーを操作するコントロールステーション内部の様子その時点で得ていた地質・高度データと事前情報に基づいたプレゼンテーションとディスカッションにより、最終的には73点(100点満点)を獲得しました。↑サイエンスモードのローバーの様子今年は蛍光反応検出器や、MID・地質観察でのデータ自動・半自動解析など、新しい試みを様々導入していたものの、それらを動かす段階まで至らなかっただけに、悔しい結果となりました。来年大会に向け、今年搭載していた実験機器の検証や改良、新しい検出法の模索を進め、更なる高得点の獲得を目指していきます。クラウドファンディング終了まで残りわずかとなりましたが、今後とも温かいご支援を賜りますよう、お願い申し上げます。 もっと見る
【CF残り1日!!】大会までの8日間 in Texas and Utah
2025/06/09 13:27いつもKARURAを応援してくださっている皆さま、ご覧くださりありがとうございます!早くもクラファン残り1日となりました。現在、69名の皆さまから833,111万円のご支援を頂いております!大変お待たせしました。URC本番直前のテキサス・ユタでの直前調整の様子をご報告いたします。テキサス前入りについて日本メンバーとアメリカメンバーは基本的にリモートで活動するため、URC本番を除き直接一緒に作業することはあまりありません。そのため、去年に引き続きUSメンバーの在籍するTexas A&M UniversityのあるHoustonの近くのCollege Stationに日本から一部のメンバーが先に渡航し、USメンバーとともに調整を行います。今年は日本から渡航した5名、アメリカの大学に在籍する日本メンバー1人、合計6名の日本メンバーが前入り組としてCollege StationでUSメンバーと合流しました。渡航〜1日目(5/21)搭乗した飛行機日本からの渡航メンバーは、成田空港からヒューストンへ直行便で向かいます。ヒューストンに到着し、USメンバーがピックアップをしてくれたあと、テキサス名物のWhataburgerに連れて行ってくれました!そのあとはTexas A&M Universityの敷地内にあるテキサス滞在の作業場へ向かいました。日本から持ってきたローバーの機体の組み立てを早急に終わらせます。この日はこれまたテキサス名物のHEBで買い出しをし、残り4日に備えました。Whataburgerでランチ2日目(5/22)朝は日本にまだ残っている日本メンバーを含めミーティングを行ったあと、作業場に向かいます。屋外で実験を行いローバーを用いて通信の確認を行います。サイエンス班はMID(Micro Image Device)を用いて、異なる条件下での画像取得作業を進めていきました。作業終了後はメンバー全員でメキシカン料理を食べにいきました。段々と初対面同士だった日米のメンバー同士もこの頃から慣れていきました。3日目(5/23)この日は作業場の横にある広い芝生でアームの実験を行いました。実験でエラーが起これば都度修正をしていきます。サイエンスは取得した画像解析の自動化のためのコードの最終調整を主に行いました。4日目(5/24)5日目は朝早く出発するので、実質この日がテキサス最終日となります。この日は朝からUSメンバーのアパートの敷地の一角でサイエンスの実験を行いました。主にドリルや溶液注入、MIDを用いた撮影の一連の流れまで確認しました。アーム班・モビリティ班はデザインを一部変更しながら改良を重ねていきました。あっという間にテキサスでの調整期間は終わりです。この日はメンバー全員で深夜まで荷物の片付けをし、次の日の出発に備えます。5・6日目(5/25, 26)テキサスから計36時間のロードトリップでURC会場のあるユタ州まで向かいます。途中ではアメリカ名物24時間朝ご飯を提供しているIHOPやグランドキャニオンに立ち寄りながら、本州縦断ほどもある距離をメンバーと過ごしました。この長い距離を運転してくれたUSメンバーには本当に感謝です!Grand Canyonで集合写真無事にユタ州モアブ近郊の宿泊地に到着し、日本からの直行メンバーとも合流しました!7日目(5/27)この日は大会出場メンバー全員が集まる唯一何も予定のない1日です。まずは朝のミーティングで全メンバー揃っての自己紹介を済ませ、早速宿泊地内での実験に取り掛かります。各ミッションでローバーに取り付ける機器が変わるため、ローバーはミッション間で争奪戦です。サイエンスは本番のプレゼンテーションに向けての準備のほか、議論を重ねて内容を深めていきました。8日目(5/28)この日はRegistrationの日です。午前中は各サブチーム各々のタスクをこなし、午後は大会会場最寄りの小さな町、Hanksvilleまで片道約3時間ほど運転をして向かいました。運営から支給されるハンバーガーを食べたあとは、他のチームと交流してお互いの技術について情報を交換しました。5/29からはいよいよミッションが始まります!1日目のミッションについてはすでに活動報告を公開したのでそちらをご覧ください!記事はこちらから↓1日目ミッション活動報告クラウドファンディングも残るところ1日となりました。是非今後とも変わらぬご支援のほど、よろしくお願いいたします。 もっと見る KARURAを応援してくださっている皆さまKARURAプロジェクトクラウドファンディングを応援いただき、ありがとうございます。クラウドファンディングも残り3日になりました!現在64名の支援者様から合計796,111円のご支援をいただいております。皆様からの応援とご支援に心より感謝申し上げます!KARURAは、5月28日から5月31日にかけて行われたURC( University Rover Challenge )の全日程が終了したことを報告させていただきます。URCでは、4つのミッションの達成度によって点数が与えられ、その合計点で競います。今回の活動報告では、大会の初日に行われた「Equipment Servicing Mission」、「Autonomous Navigation Mission」についての概要説明と私たちKARURAの結果を報告いたします。Equipment Servicing MissionEquipmentミッション(機器整備ミッション)では、ローバーに取り付けたロボットアームを使い、引き出しやスイッチ、ボタン、キーボードなどが取り付けられたランダーに対して様々なタスクをこなしていきます。また、試験管をピックアップして箱の中に入れ、その箱をランダーに搭載するといった本物の宇宙開発さながらのタスクもあります。綿密な計画を立てて挑んだミッション本番では、最初のタスクであるスイッチ操作は成功したものの、joint5-6のストールや熱によるケーブル保持用のテープの脱落などで操作が厳しい状況となりました。スイッチを操作する様子更には、引き出しタスクにおいて運営側のミスにより引き出しを固定するネジが外されておらずロボットハンドの指が大破してしまいました。予備部品を用いて修理をしたものの、第5,6関節に使用していた3Dプリントパーツにも影響があり、ミッション再開後のタスク中に根本から大きく破損してしまいました。根元から破損したロボットアームこのような状況下でも、ジョイスティック操作やUSBの抜き取りに成功し結果としては27点を獲得しました。昨年よりも数多くのタスクに挑戦したものの、成功出来なかったタスクや時間を費やしてしまったタスクも多く、悔しい結果となりました。来年大会に向けては、アクチュエーター制御の精度の向上や電装部品の保護・頑強なハードウェアの構築を行い、ミッション完了を目指していきます。Autonomous Navigation MissionANミッション(自律走行ミッション)では、岩や丘などの障害物を避けながら、出来るだけ早く目標の位置に到達し、物体認識や画像認識などを使いながら自動で制御を行います。私たちは今回、Nav2を用いた自律ナビゲーションに挑戦しました。どのような障害物があるかも分からない未知の環境で、ロボットが自律的に移動するという難しい課題に対し、SLAMやRTKなど高度な技術をとりいれて開発を進めてきました。しかし、大会直前には多数の重大なバグが立て続けに発生したり、大会の1週間前に主要な担当メンバーがやむを得ない事情で参加できなくなったりするなどの予期せぬアクシデントに見舞われました。限られた体制と時間の中で、なんとか動作の安定化を図り、GPS誘導による最低限の動作までは達成しましたが、最終的にデバッグが間に合わず、やむを得ず今年のAN部門は棄権するという判断に至りました。Autonomous Navigation Missionのフィールド非常に悔しい結果ではありますが、今回の挑戦と失敗を通じて得た経験は大きな糧となりました。この悔しさをバネに、来年こそは成果を形にできるよう、一層努力を重ねてまいります。次回は、2日目、3日目に行われたミッションについてご報告させていただきます。クラウドファンディングも残り3日となりましたが、今後とも変わらぬご支援のほど、よろしくお願いいたします。 もっと見る
KARURAを応援してくださっている皆さまKARURAプロジェクトクラウドファンディングを応援いただき、ありがとうございます。クラウドファンディングも残り3日になりました!現在64名の支援者様から合計796,111円のご支援をいただいております。皆様からの応援とご支援に心より感謝申し上げます!KARURAは、5月28日から5月31日にかけて行われたURC( University Rover Challenge )の全日程が終了したことを報告させていただきます。URCでは、4つのミッションの達成度によって点数が与えられ、その合計点で競います。今回の活動報告では、大会の初日に行われた「Equipment Servicing Mission」、「Autonomous Navigation Mission」についての概要説明と私たちKARURAの結果を報告いたします。Equipment Servicing MissionEquipmentミッション(機器整備ミッション)では、ローバーに取り付けたロボットアームを使い、引き出しやスイッチ、ボタン、キーボードなどが取り付けられたランダーに対して様々なタスクをこなしていきます。また、試験管をピックアップして箱の中に入れ、その箱をランダーに搭載するといった本物の宇宙開発さながらのタスクもあります。綿密な計画を立てて挑んだミッション本番では、最初のタスクであるスイッチ操作は成功したものの、joint5-6のストールや熱によるケーブル保持用のテープの脱落などで操作が厳しい状況となりました。スイッチを操作する様子更には、引き出しタスクにおいて運営側のミスにより引き出しを固定するネジが外されておらずロボットハンドの指が大破してしまいました。予備部品を用いて修理をしたものの、第5,6関節に使用していた3Dプリントパーツにも影響があり、ミッション再開後のタスク中に根本から大きく破損してしまいました。根元から破損したロボットアームこのような状況下でも、ジョイスティック操作やUSBの抜き取りに成功し結果としては27点を獲得しました。昨年よりも数多くのタスクに挑戦したものの、成功出来なかったタスクや時間を費やしてしまったタスクも多く、悔しい結果となりました。来年大会に向けては、アクチュエーター制御の精度の向上や電装部品の保護・頑強なハードウェアの構築を行い、ミッション完了を目指していきます。Autonomous Navigation MissionANミッション(自律走行ミッション)では、岩や丘などの障害物を避けながら、出来るだけ早く目標の位置に到達し、物体認識や画像認識などを使いながら自動で制御を行います。私たちは今回、Nav2を用いた自律ナビゲーションに挑戦しました。どのような障害物があるかも分からない未知の環境で、ロボットが自律的に移動するという難しい課題に対し、SLAMやRTKなど高度な技術をとりいれて開発を進めてきました。しかし、大会直前には多数の重大なバグが立て続けに発生したり、大会の1週間前に主要な担当メンバーがやむを得ない事情で参加できなくなったりするなどの予期せぬアクシデントに見舞われました。限られた体制と時間の中で、なんとか動作の安定化を図り、GPS誘導による最低限の動作までは達成しましたが、最終的にデバッグが間に合わず、やむを得ず今年のAN部門は棄権するという判断に至りました。Autonomous Navigation Missionのフィールド非常に悔しい結果ではありますが、今回の挑戦と失敗を通じて得た経験は大きな糧となりました。この悔しさをバネに、来年こそは成果を形にできるよう、一層努力を重ねてまいります。次回は、2日目、3日目に行われたミッションについてご報告させていただきます。クラウドファンディングも残り3日となりましたが、今後とも変わらぬご支援のほど、よろしくお願いいたします。 もっと見る








コメント
もっと見る