
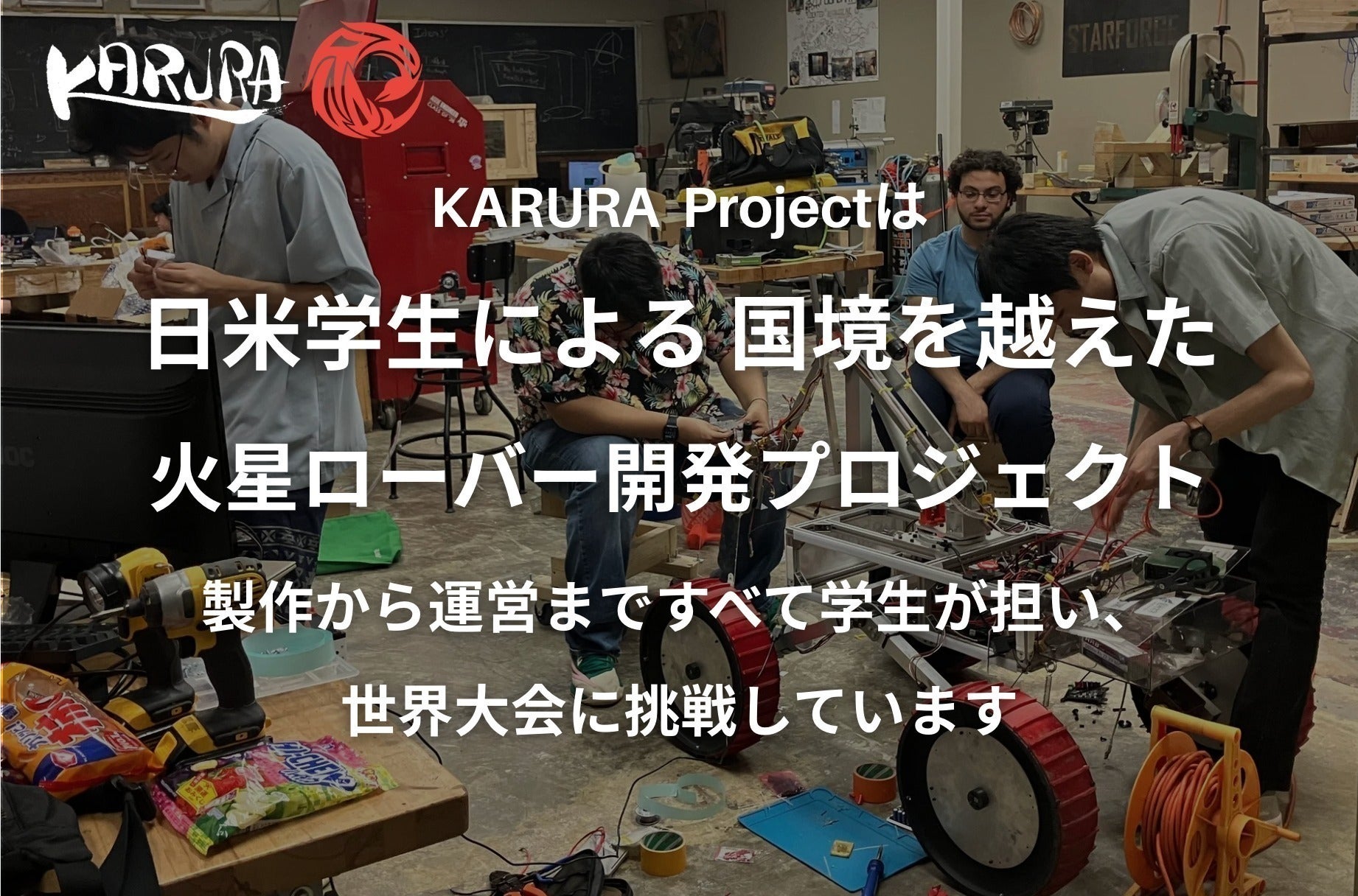
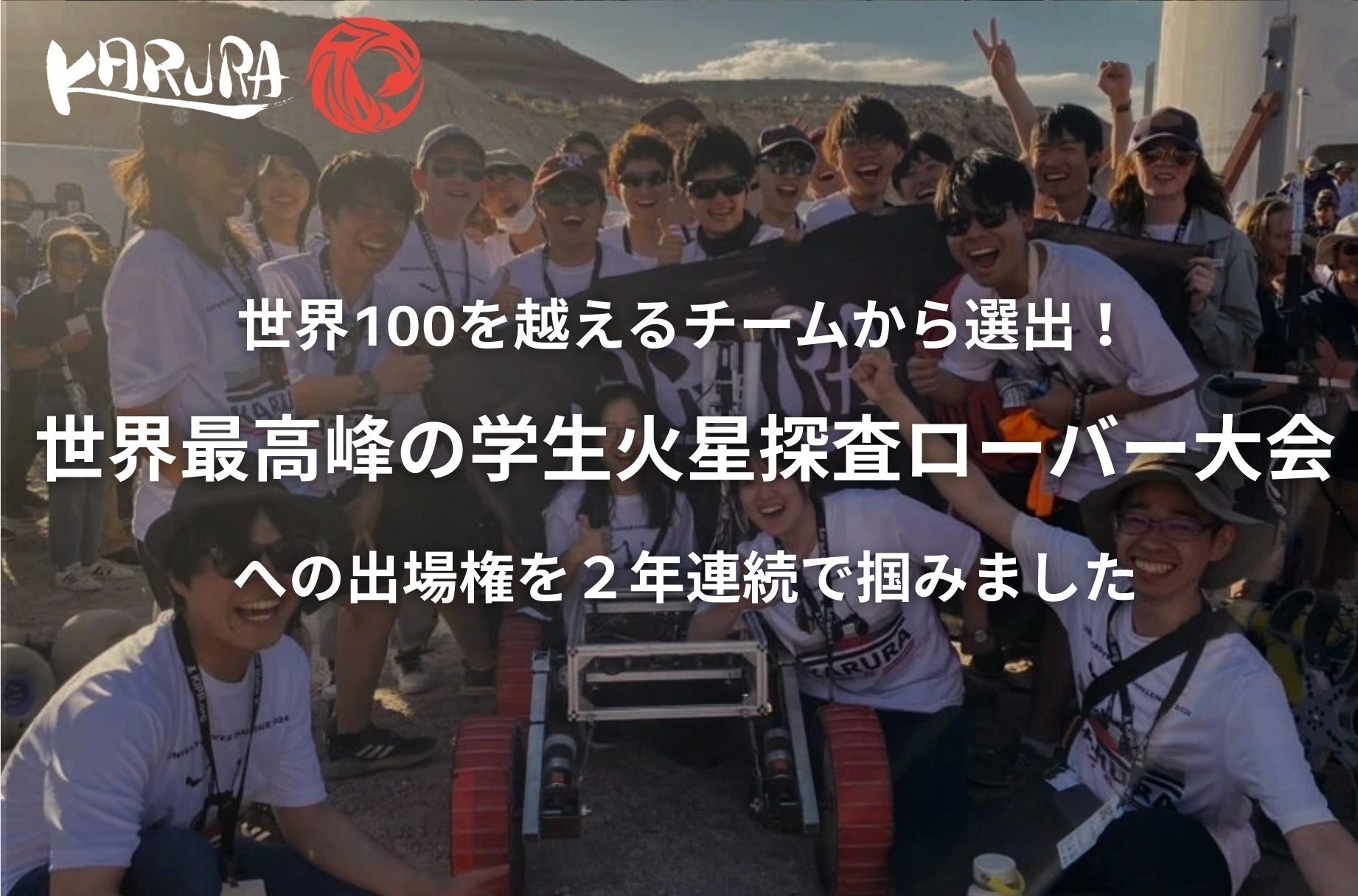
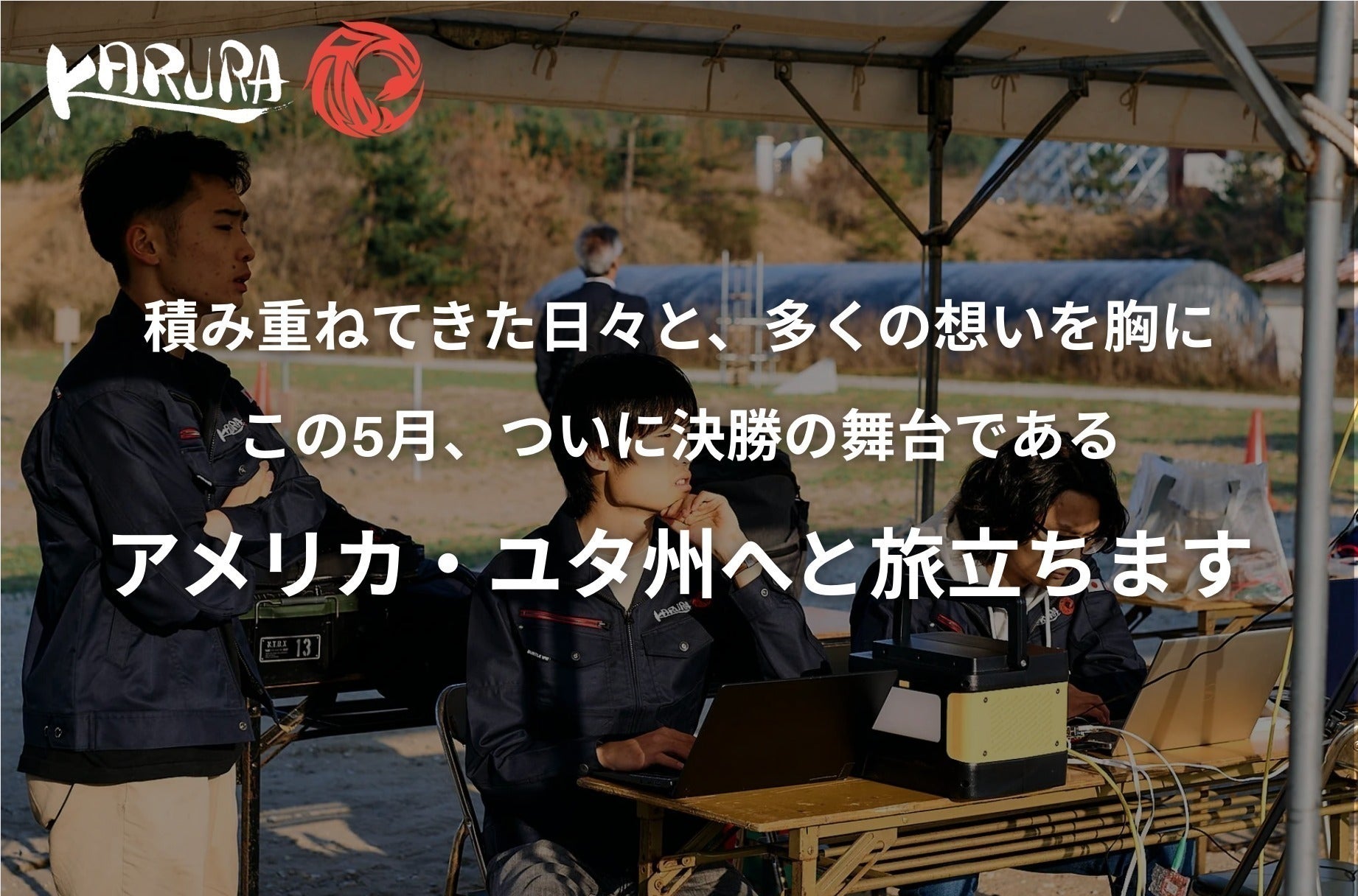
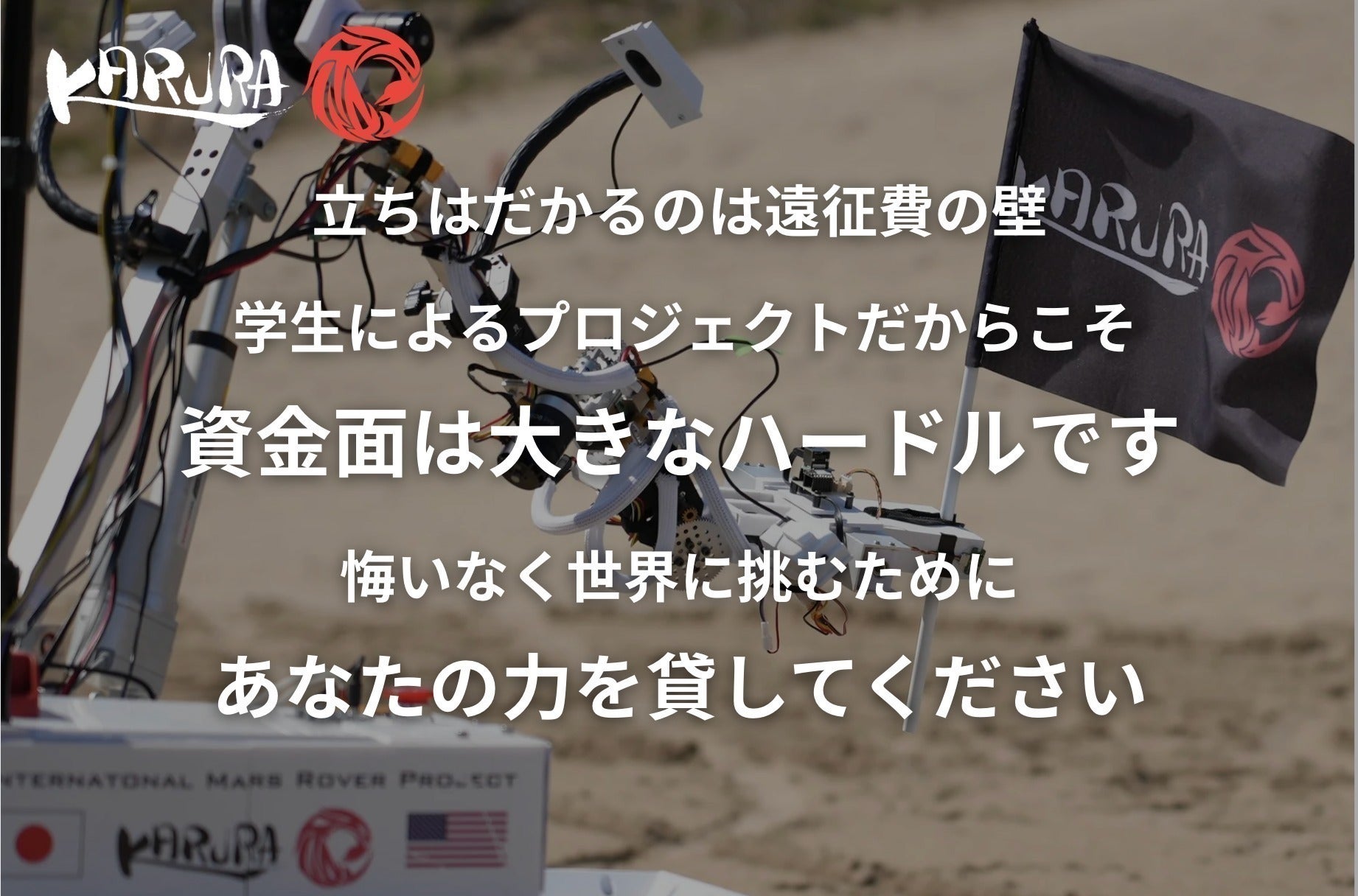



KARURA を応援してくださっている皆様KARURAプロジェクト クラウドファンディングを応援いただき、ありがとうございます。遂にクラウドファンディング最終日となりました!現在68名の支援者様から合計833,111円のご支援をいただいております。皆様からの応援とご支援に心より感謝申し上げます!今回の活動報告では、大会の3日目に行われた「Science Mission」についての概要説明と私たちKARURAの結果を報告いたします。Science Missionサイエンスミッション(生命探査ミッション)では、ローバーに搭載されたカメラ屋実験機器を用いてサンプルリターン地点を決定・サンプルを採取し、その科学的妥当性を考察します。また、ローバーでの探査終了後、審査員へのプレゼンテーション及びディスカッションを行います。私たちは今回、カメラによる地質探査、Micro Imaging Device (MID) による顕微観察、蛍光反応検出器を用いた有機物検出を武器に大会に臨みました。↑蛍光反応の様子どんな有機物が検出できるかもわからない環境で探査を行うため、検出可能性とスピードを重視した検出方法を採用し、実験や考察、練習を重ねることで効率的な検出・進行を目指しました。↑蛍光反応検出器で上の蛍光反応の様子を撮影した様子(右) 蛍光強度を定量化した様子(左)直前までローバーでの操作・プレゼンテーションの練習を重ね、秒単位の綿密な計画を立てて臨んだミッション本番では、当初は順調に進んでいたものの、ローバー内実験用のドリルに異常が発生、蛍光反応検出器・MIDを用いた実験・観察ができない状況に陥りました。すぐさまカメラでの地質探査に注力しましたが、その後ローバーとの通院が断絶、その時点で得ている状況でのプレゼンテーションを行うこととなりました。↑ローバーを操作するコントロールステーション内部の様子その時点で得ていた地質・高度データと事前情報に基づいたプレゼンテーションとディスカッションにより、最終的には73点(100点満点)を獲得しました。↑サイエンスモードのローバーの様子今年は蛍光反応検出器や、MID・地質観察でのデータ自動・半自動解析など、新しい試みを様々導入していたものの、それらを動かす段階まで至らなかっただけに、悔しい結果となりました。来年大会に向け、今年搭載していた実験機器の検証や改良、新しい検出法の模索を進め、更なる高得点の獲得を目指していきます。クラウドファンディング終了まで残りわずかとなりましたが、今後とも温かいご支援を賜りますよう、お願い申し上げます。











