
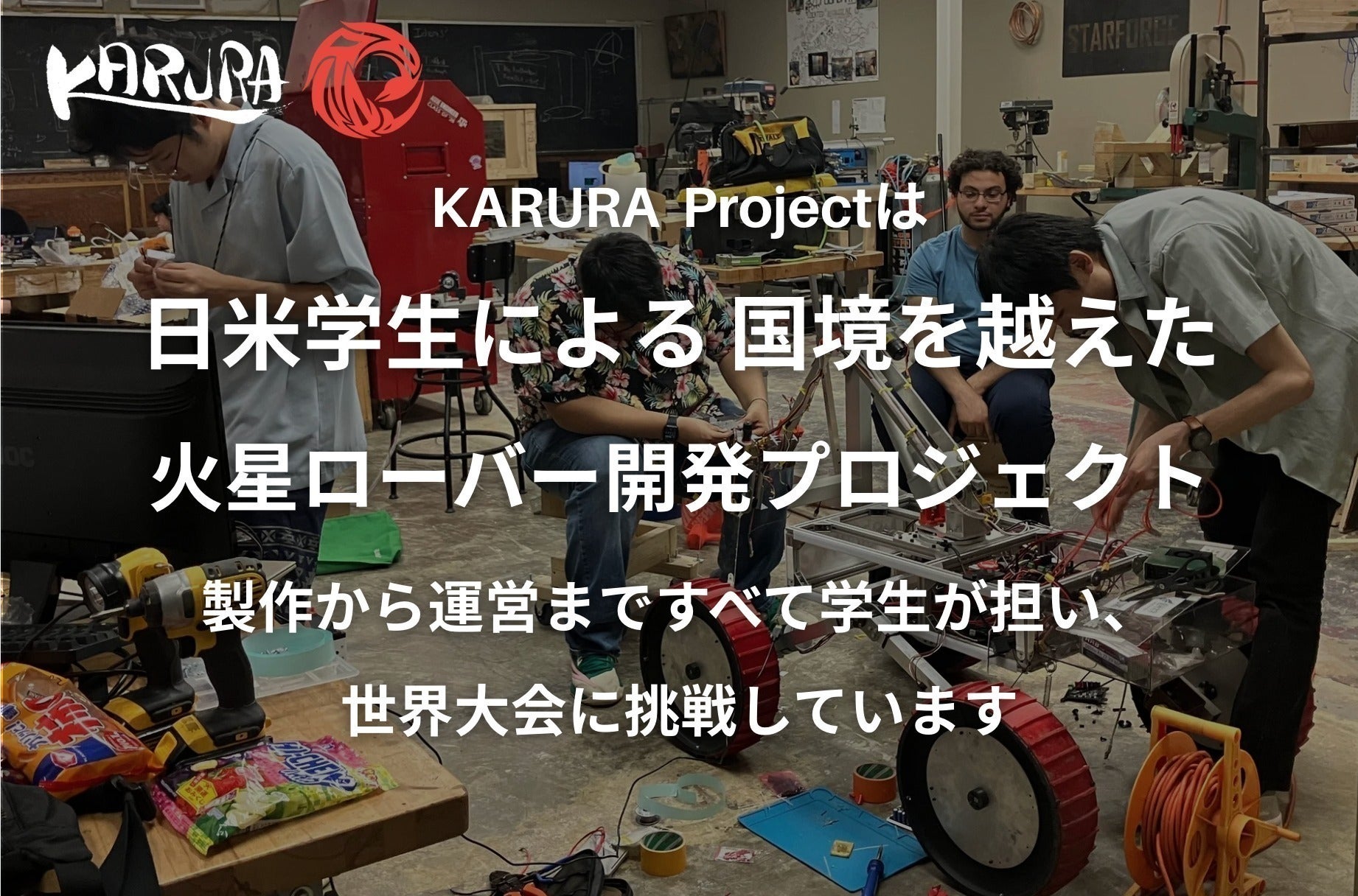

KARURAを応援してくださっている皆さま
KARURAプロジェクトクラウドファンディングを応援いただき、ありがとうございます。
クラウドファンディングも残り3日になりました!現在64名の支援者様から合計796,111円のご支援をいただいております。
皆様からの応援とご支援に心より感謝申し上げます!
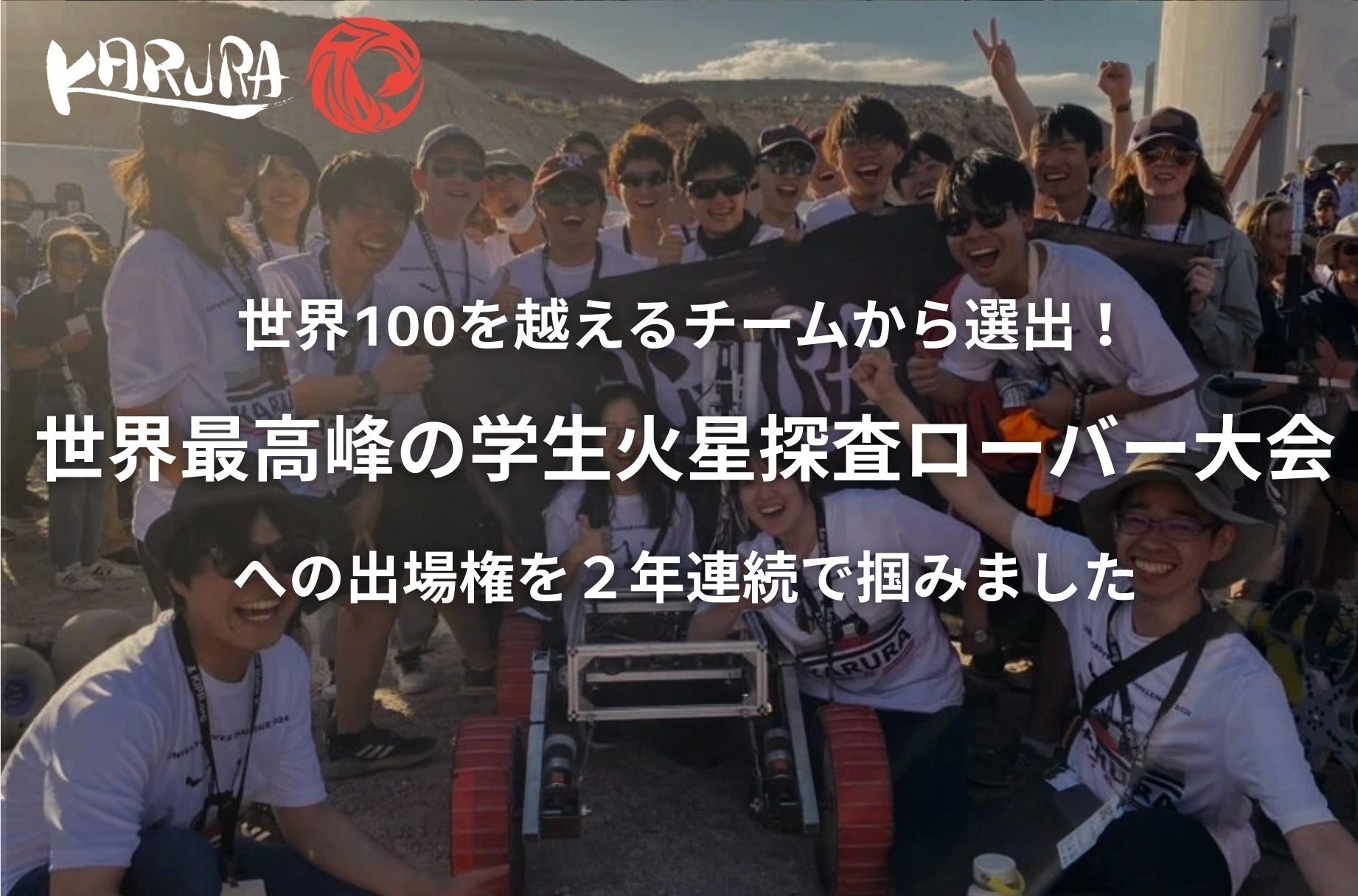
KARURAは、5月28日から5月31日にかけて行われたURC( University Rover Challenge )の全日程が終了したことを報告させていただきます。
URCでは、4つのミッションの達成度によって点数が与えられ、その合計点で競います。今回の活動報告では、大会の初日に行われた「Equipment Servicing Mission」、「Autonomous Navigation Mission」についての概要説明と私たちKARURAの結果を報告いたします。
Equipment Servicing Mission
Equipmentミッション(機器整備ミッション)では、ローバーに取り付けたロボットアームを使い、引き出しやスイッチ、ボタン、キーボードなどが取り付けられたランダーに対して様々なタスクをこなしていきます。また、試験管をピックアップして箱の中に入れ、その箱をランダーに搭載するといった本物の宇宙開発さながらのタスクもあります。
綿密な計画を立てて挑んだミッション本番では、最初のタスクであるスイッチ操作は成功したものの、joint5-6のストールや熱によるケーブル保持用のテープの脱落などで操作が厳しい状況となりました。

スイッチを操作する様子
更には、引き出しタスクにおいて運営側のミスにより引き出しを固定するネジが外されておらずロボットハンドの指が大破してしまいました。予備部品を用いて修理をしたものの、第5,6関節に使用していた3Dプリントパーツにも影響があり、ミッション再開後のタスク中に根本から大きく破損してしまいました。

根元から破損したロボットアーム
このような状況下でも、ジョイスティック操作やUSBの抜き取りに成功し結果としては27点を獲得しました。
昨年よりも数多くのタスクに挑戦したものの、成功出来なかったタスクや時間を費やしてしまったタスクも多く、悔しい結果となりました。
来年大会に向けては、アクチュエーター制御の精度の向上や電装部品の保護・頑強なハードウェアの構築を行い、ミッション完了を目指していきます。
Autonomous Navigation Mission
ANミッション(自律走行ミッション)では、岩や丘などの障害物を避けながら、出来るだけ早く目標の位置に到達し、物体認識や画像認識などを使いながら自動で制御を行います。
私たちは今回、Nav2を用いた自律ナビゲーションに挑戦しました。
どのような障害物があるかも分からない未知の環境で、ロボットが自律的に移動するという難しい課題に対し、SLAMやRTKなど高度な技術をとりいれて開発を進めてきました。
しかし、大会直前には多数の重大なバグが立て続けに発生したり、大会の1週間前に主要な担当メンバーがやむを得ない事情で参加できなくなったりするなどの予期せぬアクシデントに見舞われました。限られた体制と時間の中で、なんとか動作の安定化を図り、GPS誘導による最低限の動作までは達成しましたが、最終的にデバッグが間に合わず、やむを得ず今年のAN部門は棄権するという判断に至りました。

Autonomous Navigation Missionのフィールド
非常に悔しい結果ではありますが、今回の挑戦と失敗を通じて得た経験は大きな糧となりました。この悔しさをバネに、来年こそは成果を形にできるよう、一層努力を重ねてまいります。
次回は、2日目、3日目に行われたミッションについてご報告させていただきます。
クラウドファンディングも残り3日となりましたが、今後とも変わらぬご支援のほど、よろしくお願いいたします。






