

ご覧くださりありがとうございます!
クラファン開始16日目です!
現在、皆さまから50万円のご支援を頂いております!目標額の半分を突破しました!!
本当に多くの方に応援していただいていることを実感しています!
本日は、KARURAの日本エンジニアリング部門リーダーの高松から、エンジニアリング部門について紹介します。
-----------
名前:高松俊介 (たかまつしゅんすけ)
学校:早稲田大学 基幹理工学研究科 機械科学・航空宇宙専攻 修士2年
役職:日本エンジニアリング部門リーダー
-----------
初めまして!KARURAの日本エンジニアリング部門リーダーの高松俊介と申します。
KARURAでは、ローバーの電源回路などの開発をしながら、エンジニアリング部門のリーダーとしてローバー製作のマネジメントをしています。
本日は、私の自己紹介と、所属するエンジニアリング部門の活動について紹介をさせていただきます!
KARURAに参加した経緯
私は、小さな頃から模型などの工作が好きで、中学、高校では電子工作を通して電気工学、プログラミング、CADに触れてきました。
大学入学後は、自分一人では作れないような大きなものを作りたい、という想いからロボコンサークルに入会しました。
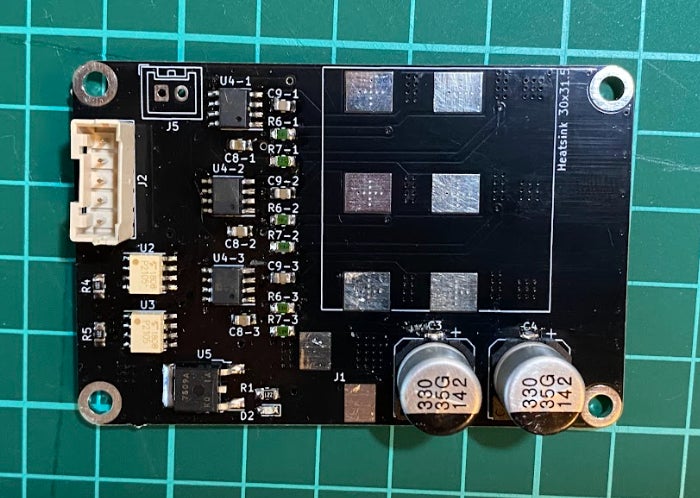
↑ロボコンサークルでは、電装担当としてモータードライバー基板の開発を担当していました。
しかし、入学したのは2020年。コロナ禍の中、対面での活動が禁止され、最初はサークルとしての活動もままなりませんでした。3年生の頃には状況は改善したものの、不完全燃焼な感じを拭いきれないまま引退を迎えます。
その時に偶然耳にしたのが、KARURA設立の話でした。
自分のものづくりに対する情熱を燃やせる場所がほしい、これまでの経験を活かして新しいことを始めたいという気持ちから、チームの立ち上げ準備に参加しました。
チームが発足した後は、試作初号機と2025年大会機体の製作でエンジニアリング部門のマネジメントを担当しています。
KARURAは学年の制限なく活動ができるのも魅力の一つです。
私のような大学院生や、高校生など、幅広い層のメンバーが活躍しています!
エンジニアリング部門の活動
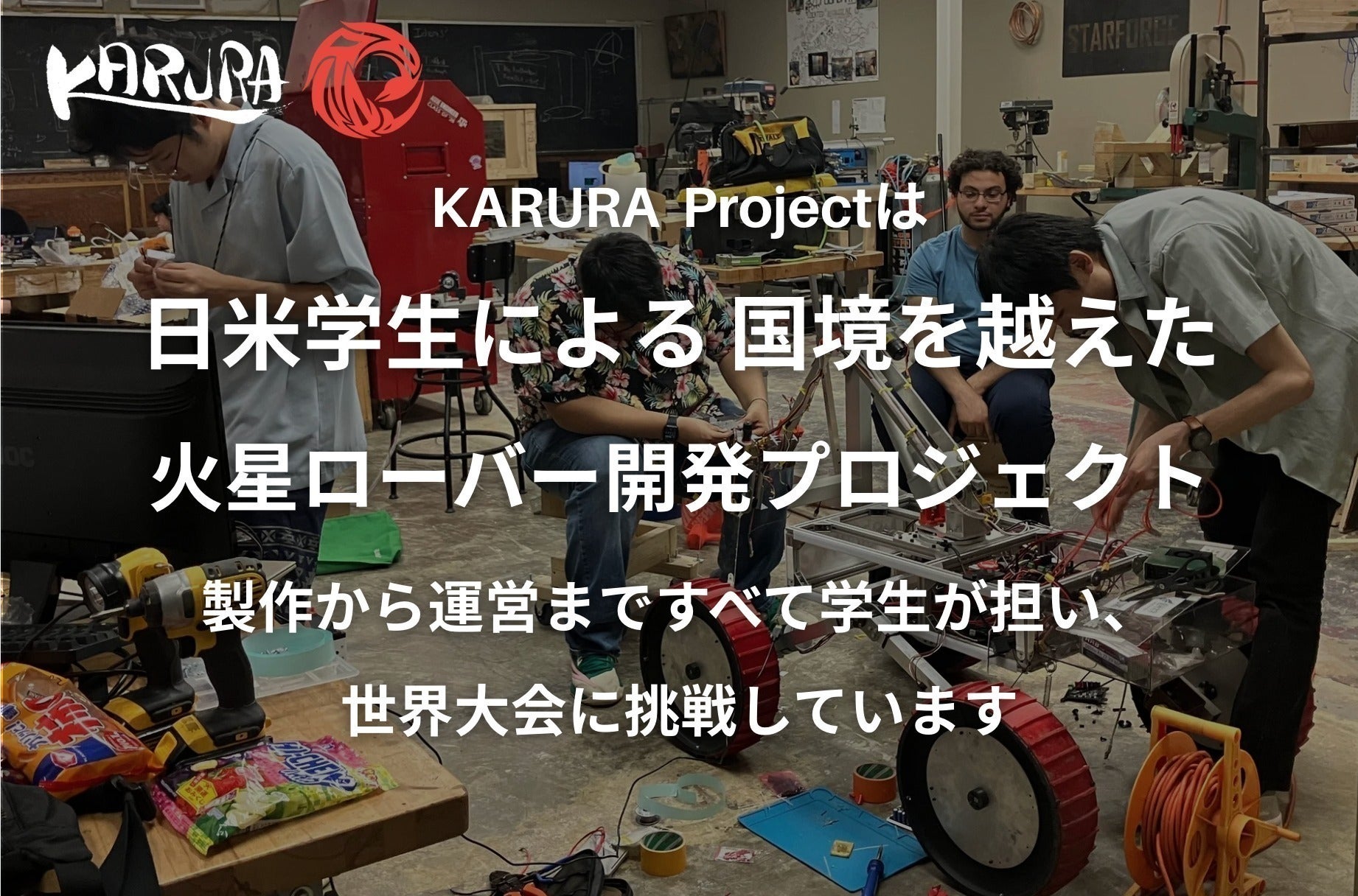
KARURAには3つの部門があり、エンジニアリング部門は、主にローバー本体の開発を担当しています。
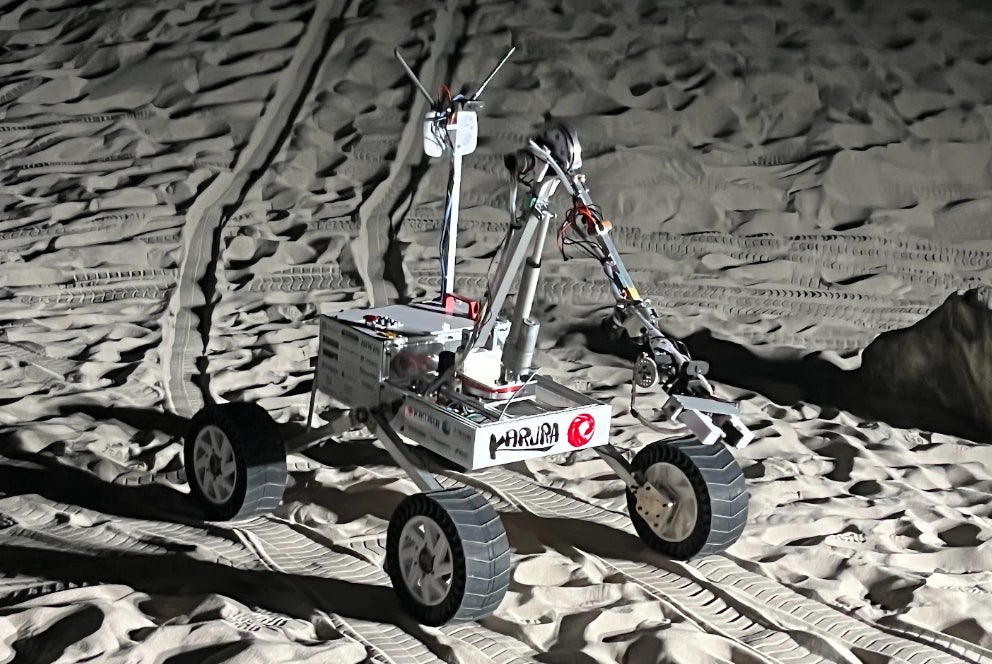
ローバーの全体像
ローバーの製作は、単に部品を組み立てるだけではなく、機構、電装、ソフトウェアなどそれぞれの分野で開発すべきものがあります。
そこでKARURAでは、機構、分野ごとにサブチームを設けて、必要な要素に特化した開発をしています。
エンジニアリング部門では、3つのサブチームが日米の国際チームであり、両国のメンバーが協力してローバー開発に取り組んでいます。
モビリティ:ローバーの車体部分の製作と制御を担当。車体部分はローバーのコンポーネントの中で唯一、全てのミッションで使用するため、特に耐久性や信頼性が求められます。
アーム:ロボットアームの製作と制御を担当。複雑かつ精密な動きを実現するため、自作の減速機構や逆運動学を用いた操作の省力化に取り組んでいます。
AN(自律走行):自律走行ミッションのソフトウェア作成を担当。自律走行に求められる、センシング、自己位置推定、経路計画などの技術を開発しています。
アメリカには、これらに加えて、2つのサブチームがあります。
通信:ローバーと地上局の通信機器開発を担当。大会で求められる、長距離、高容量の通信を実現するため、ハードウェア、ソフトウェア両方の開発をしています。
地上局:ローバーの操縦に使用するソフトウェアの開発を担当。大量の情報を効率よく操縦者に伝えるための操作インターフェースを設計しています。
日米共同のものづくり
日本とアメリカの学生が協働でものづくりに取り組むことは、KARURAの最大の特徴であると同時に、最もチャレンジングな課題でもあります。
私たちは、この課題に挑戦するため、オンラインツールを活用しつつ、最も良い国際協力体制とはどのようなものかを模索しています。
分担の形は、それぞれのサブチームの特徴に合わせて変化させています。
例えば、モビリティは日本とアメリカ両方で必要なため、互換性を残しながら2通りの設計で機体を製作することで、試作の回数を増やしています。
一方、アームのチームでは両国のメンバーが分担して設計、製作して1台のアームを完成させます。
このように、KARURAのメンバーは学生による国際的な宇宙開発のモデルケースとなるべく、日々試行錯誤を重ねています!

↑日本とアメリカのメンバーによるオンラインミーティング。会話はもちろん英語です。
活動の様子
ここでは、活動の様子を写真とともに紹介します!

↑KARURAの関東付近の活動拠点である「Tokyo Innovation Base」。作業スペースだけではなく、工作機械もあるため、ローバー製作に必要な本格的な加工が可能です。

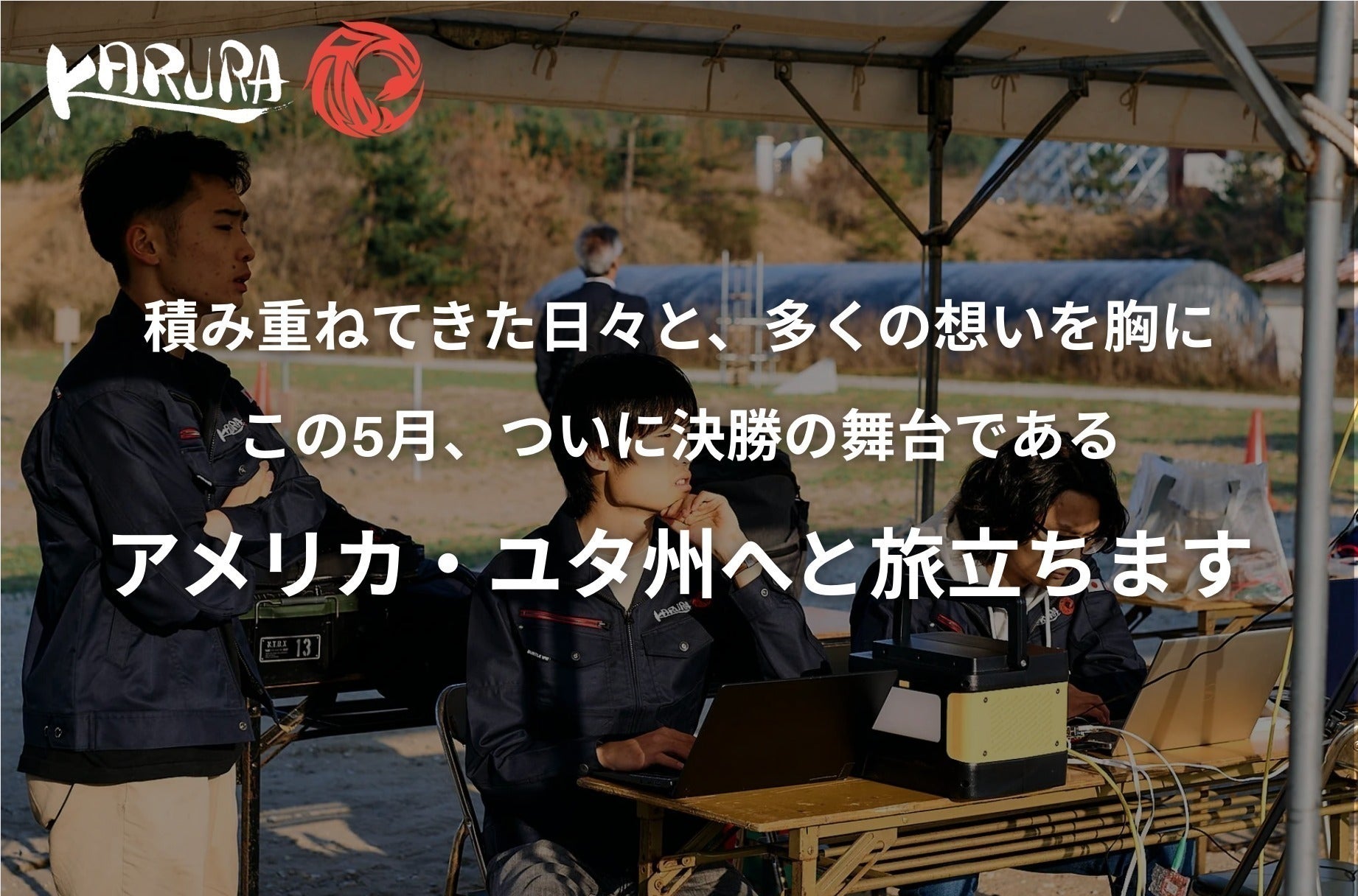
↑ローバーの実験は屋外で行うことも多いです。屋外での実験は電源や時間の制約が多く、効率的なマネジメントが求められます。
おわりに
最後まで読んでいただき、ありがとうございました!
URCまで残り2週間ほどとなり、製作も大詰めを迎えています。
大会に万全の状態で臨めるように、残りの期間も全力で準備を進めていきますので、これからも応援をよろしくお願いします!






