



ARES Projectは、東北大学、慶應義塾大学の学生を中心とする火星探査機開発チームです。私たちは、火星探査機の学生世界大会University Rover Challenge(URC)への出場を目指して活動をスタートしました。約2年間の開発期間を経てついに昨年予選を突破し、URCの決勝大会に日本のチームとして初めて出場しました。
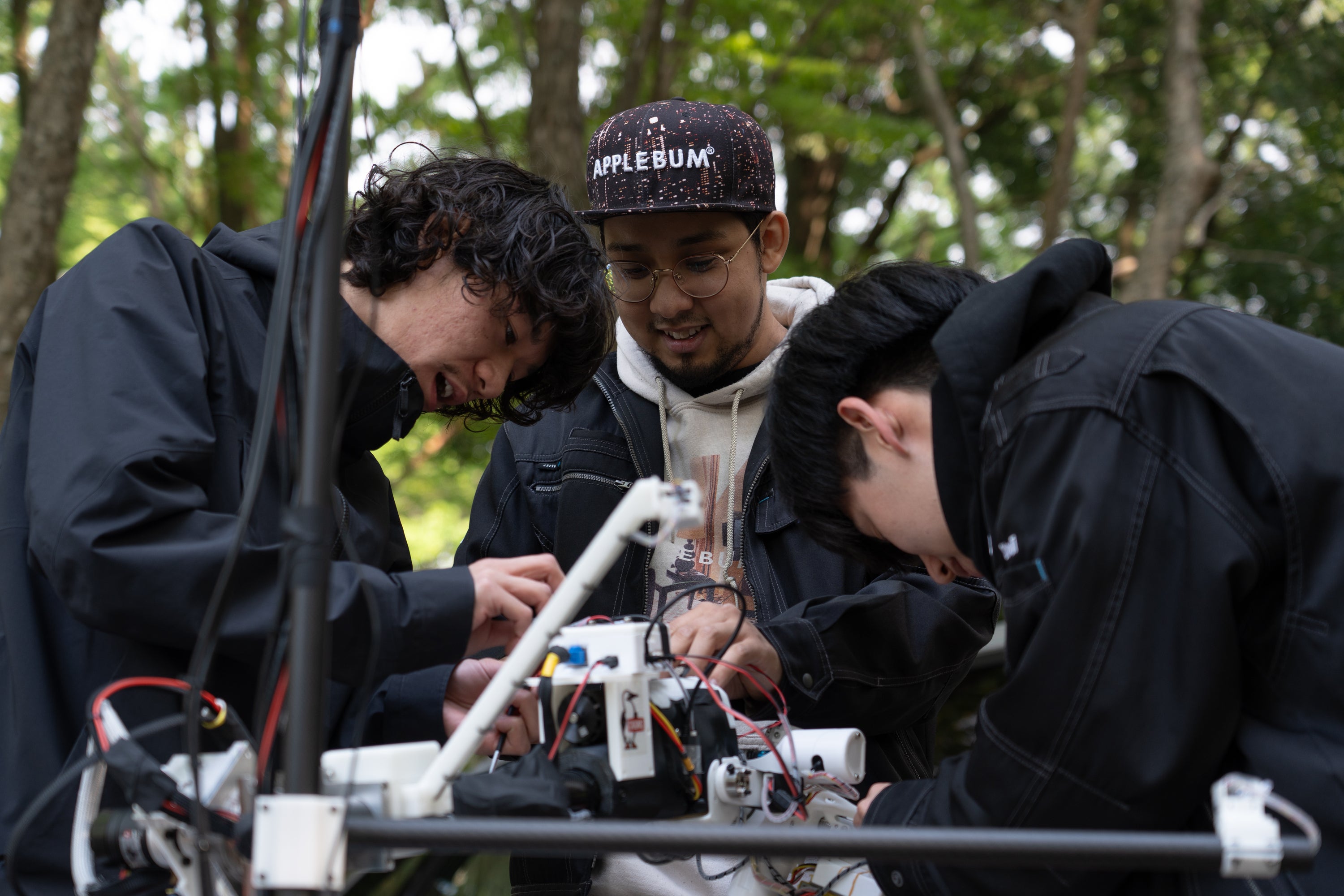
私たちは現在、東北班は東北大学、東京班は100BANCHを拠点に活動しています。東北班は探査機本体を、東京班はロボットアームを主に担当しています。月1回程度で両拠点のメンバーが集まり、アームと探査機本体を合体させての実験などをおこなっています。



火星探査機の国際大会へ出場し、日本勢初優勝を目指す
 ©University Rover Challenge, 2019
©University Rover Challenge, 2019
私たちは、火星探査機の学生世界大会である、University Rover Challenge (URC)に出場し、日本勢初の優勝を目指します。米国ユタ州の火星実験場Mars Desert Research Stationにて毎年開催される本大会には、世界各国の大学から100チーム以上が参加しています。
2025年は5月28日~31日に開催され、大会では、以下の4つのミッションが課せられ、その合計得点によって優勝チームが決まります。





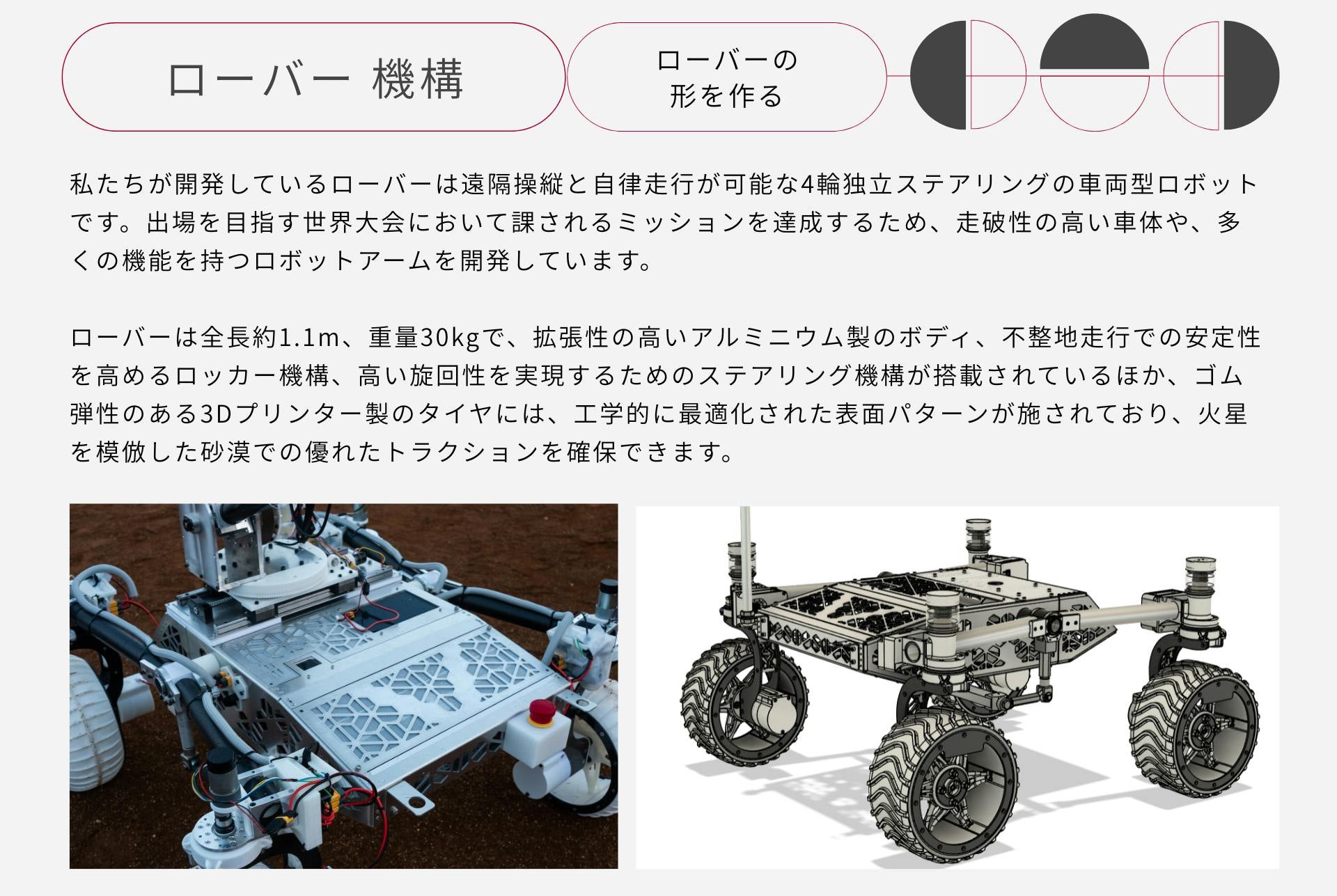
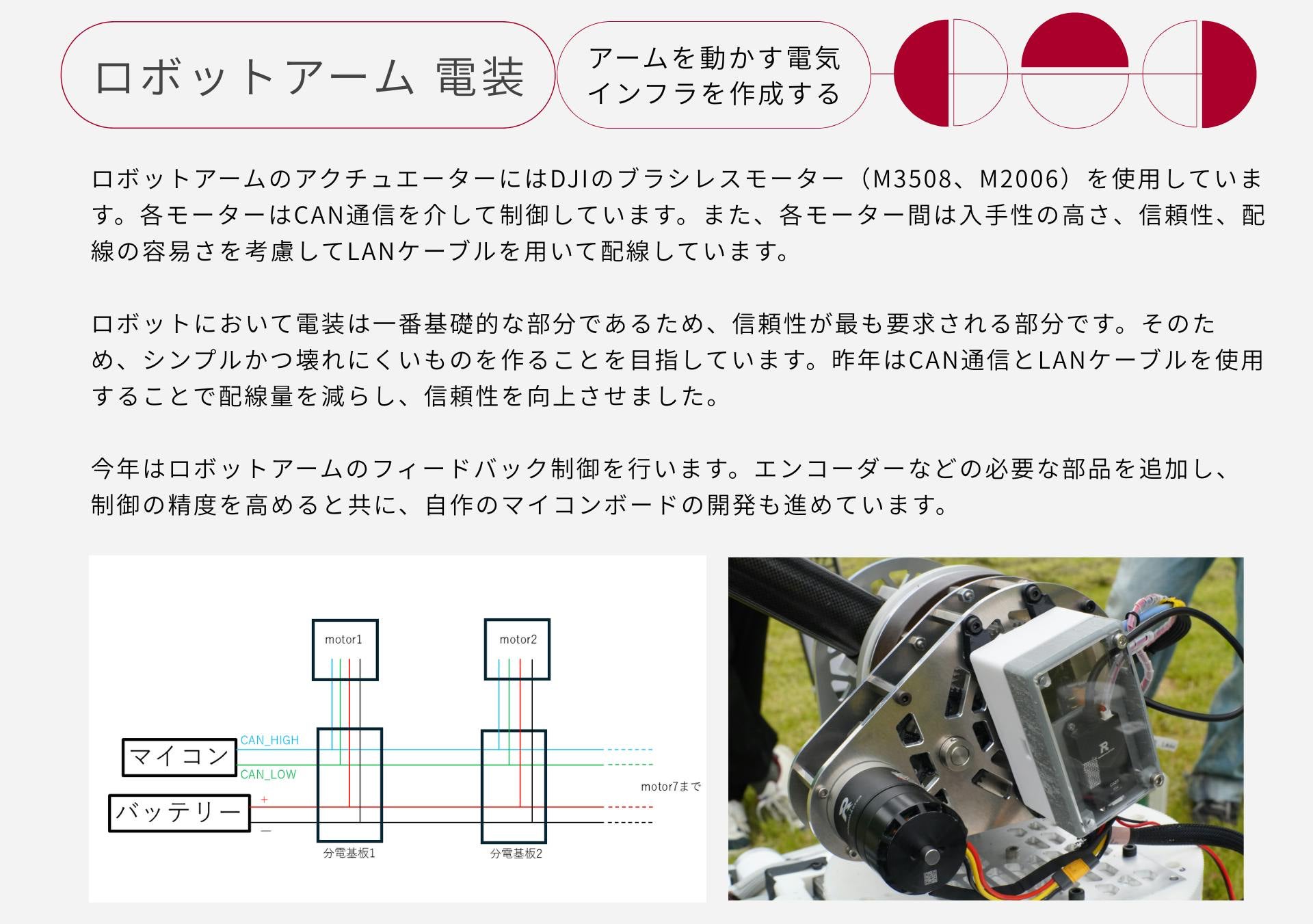
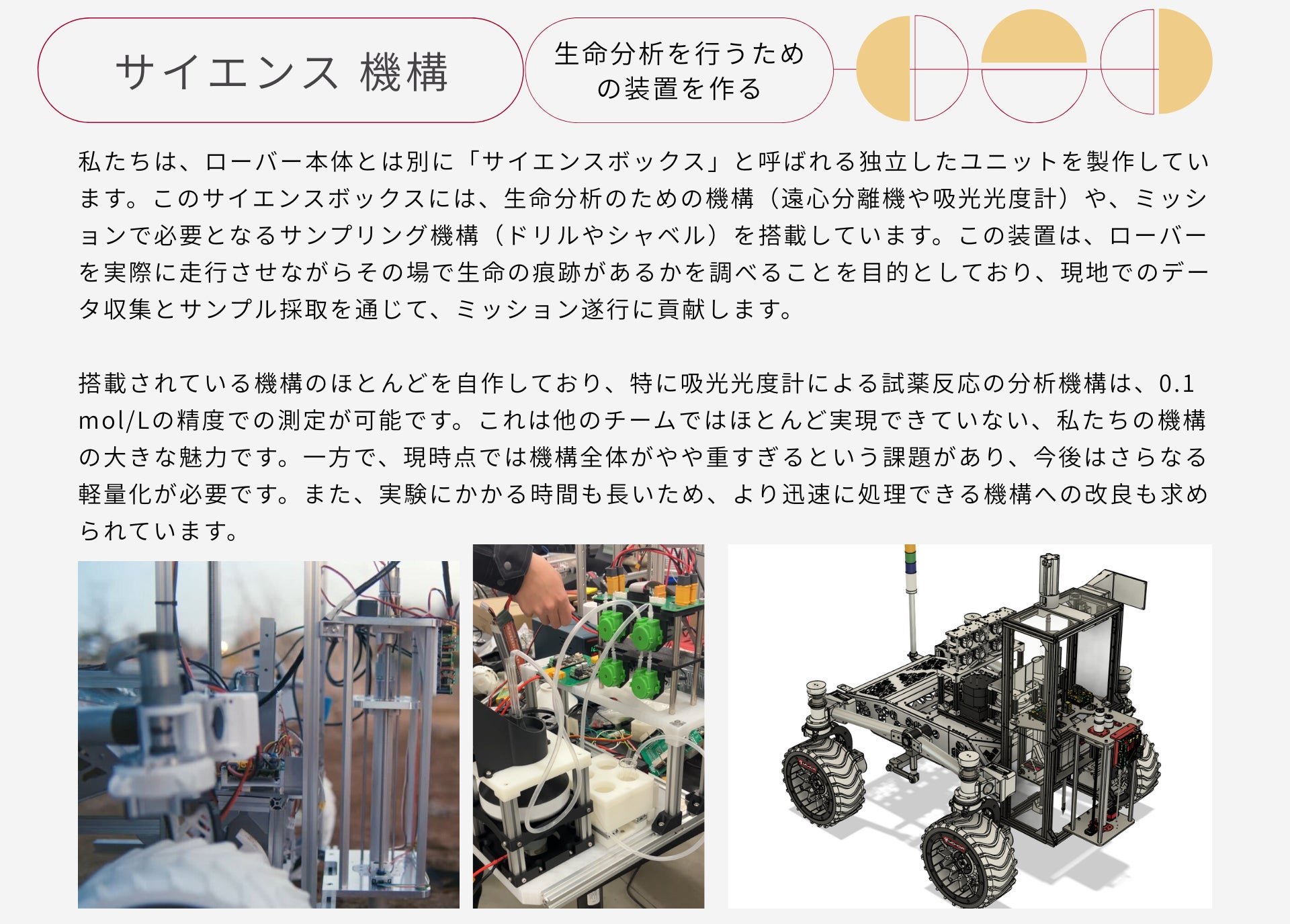
私たちはURCに優勝するために、この大会に集う世界の強豪チームに負けない探査機を作り上げることを大きな目標として、日々の活動に取り組んでいます。URCで課されるミッションをクリアするためには、まず強靭で軽量な機体、砂地や岩場で自在に移動可能なタイヤとステアリングが必要です。さらに、繊細さとパワフルさを両立し柔軟な動きに対応するロボットアーム、地面を掘削しサンプルを採取するとともに探査機内で生命を検知可能な生命分析装置の搭載が求められます。また、これらのシステムを制御するソフトウェアと回路の開発も必要になります。
私たちはどう挑むのか





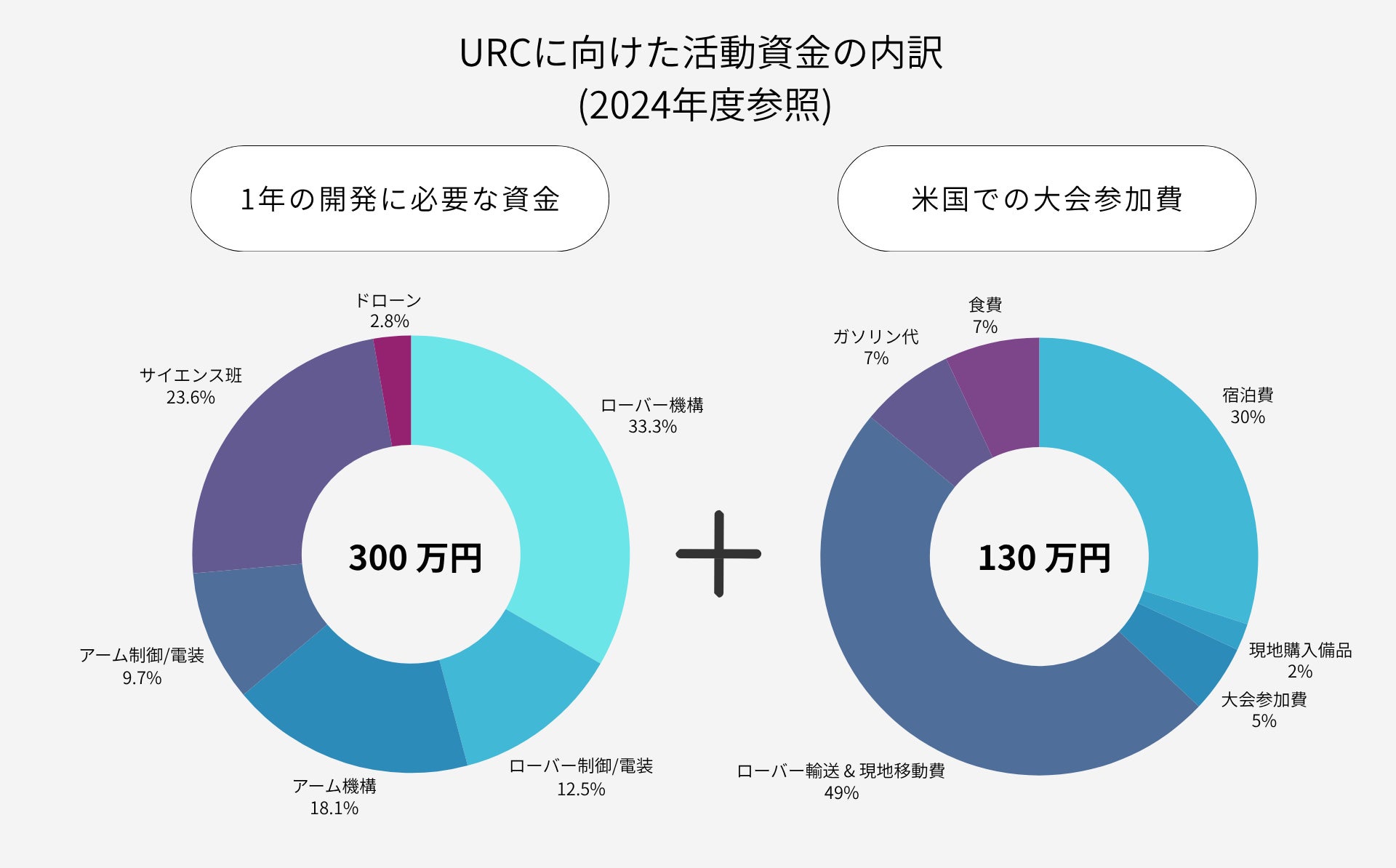
資金の用途
このように、火星探査機の開発には、機械設計・電子回路・制御・科学分析など、多様な分野にまたがる専門技術が求められます。火星に模範したURCのフィールドでは、わずかな誤差や不具合が結果を大きく左右するため、各分野において高い性能と精度を両立する技術力が試されます。この複合的な開発の高度化に伴い、必要となる資金規模も年々大きくなっています。
また、私たちは、試作と検証のサイクルを回し続けることで、課題を見つけ出し、改良を重ねる開発プロセスを大切にしています。この開発理念に基づいた環境づくりを実践し続けるためには、継続的な資金の投入が不可欠となってきます。そして、この理念を貫いてこそ、URC優勝という目標に一歩ずつ近づけると私たちは考えています。
今回ご支援いただいた資金は、URC2026への挑戦に向けて、主に以下の用途に活用させていただきます。


立ち上げの背景

車輪型の探査機による惑星探査は、実際の月・火星探査にて広く用いられている手法であり、さらなる発展が見込まれる宇宙開発において、探査機開発の技術・経験は欠かせません。
世界では、学生を対象とした大規模な火星探査機の国際大会が開催されています。参加チームには、欧米の先進国のみならず、アジア、アフリカ、南米の大学も数多く名を連ねます。ところが、昨年までに日本から大会に参加したチームは存在しませんでした。
そんな中、私たちは2022年3月に日本初となる学生による火星探査機開発チーム「ARES Project」を立ち上げ、2024年のURC大会に日本初のチームの一つとして参加しました。
日本の宇宙開発をより活発に
しかし、日本において、学生による探査機開発の分野はまだまだ充実しているとはいえない状態です。そこで私たちは、これからも継続的に世界大会に挑戦し続け、そこで得た知見や培った技術を蓄積していくことで、探査機開発に挑戦しやすい環境を整えていきたいと考えています。未来を担う学生たちへ探査機の開発環境を提供していくことを通じ、わが国の宇宙開発をより活発にしていくことを目指しています。

宇宙を目指し、地球に還元する

また、本プロジェクトによって培われた技術の応用範囲は惑星探査にとどまりません。探査機の自動運転技術の開発や精密な作業を実現するロボットアームの開発は、災害救助ロボットや自動運搬ロボットなど、幅広い領域に応用可能です。宇宙を目指して世界に挑戦し、培った技術を地球に還元していくことも私たちの目標の一つです。
宇宙を知ることは、我々と、我々の住む地球を知ることに繋がります。特に、地球と同じ太陽系の惑星であり、かつて生命が存在した可能性が議論されている火星の探査は、地球の成り立ちや生命の起源を解き明かす重要な鍵となります。どこで、どのように生命が誕生し、進化してきたのか。その謎を解くことは、将来の地球環境保護への道筋を立てる手がかりにもなり得るはずです。

私たちはチーム立ち上げ以来、様々な改良を重ねながら7基の探査機を開発してきました。初期は試作してはまた一から作り直すことの繰り返しでした。
 過去に開発した火星探査機
過去に開発した火星探査機
しかし、そのような試行錯誤の中で得られた知見を積み重ねていくことで、最新の機体である「ARES 8」は一つの機体を改良していくという形で開発を続け、大会で通用するレベルまで成熟させることができました。
 ARES 8
ARES 8
 ARES 8
ARES 8
 ARES 8
ARES 8

ー 大会出場 ー

ー イベント出演 ー



ー 学会発表 ー
私たちARES Projectは、実践的な開発活動に加え、学術的な研究活動を積極的に行っています。開発技術を学術的な側面から検証し、そこから得られた知見を学会発表を通じて広く共有することで、今後の宇宙開発の発展に貢献していきたいと考えています。


ー メディア出演 ー


ー 実験 ー


■ 開発フェーズ 1:新機体開発と国際発信
<2025年10月〜12月>
10月:URC2026を見据えた新機体の本格開発スタート
11月:URC2026 第一審査書類提出、ロボット・宇宙フェスタふくしま 2025 出展予定
12月:新機体の初期完成・検証開始
■ 開発フェーズ 2:実証・改良と国内フィールド実証
<2026年1月〜3月>
1月:12月の検証結果を考慮した機体改良
2月:URC審査書類準備・提出、新機体実験の本格化、鳥取ローバーチャレンジ(TRC)準備
3月上旬:鳥取ローバーチャレンジ(TRC)2026 出場・国内フィールド実証
■ 開発フェーズ 3:最終仕上げとURC挑戦
<2026年4月〜5月>
4月:TRCの成果を活かし、最終設計・戦略をURC向けに調整
5月:機体の最終調整・現地搬送手配
5月末:University Rover Challenge (URC) 2026 本戦出場(アメリカ・ユタ州)
応援メッセージ








皆様のご期待に沿えるよう、努力してまいります。よろしくお願いいたします!

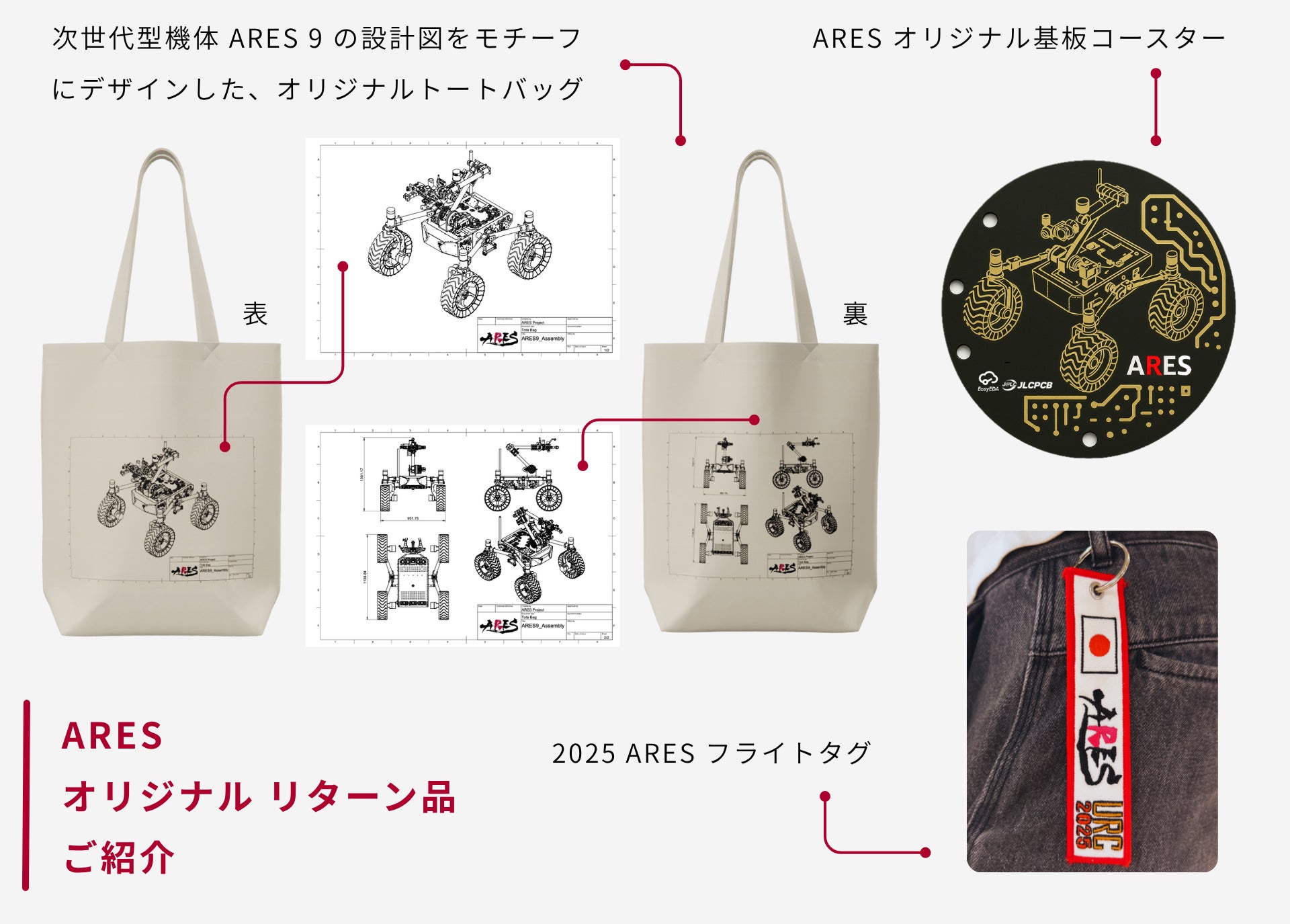
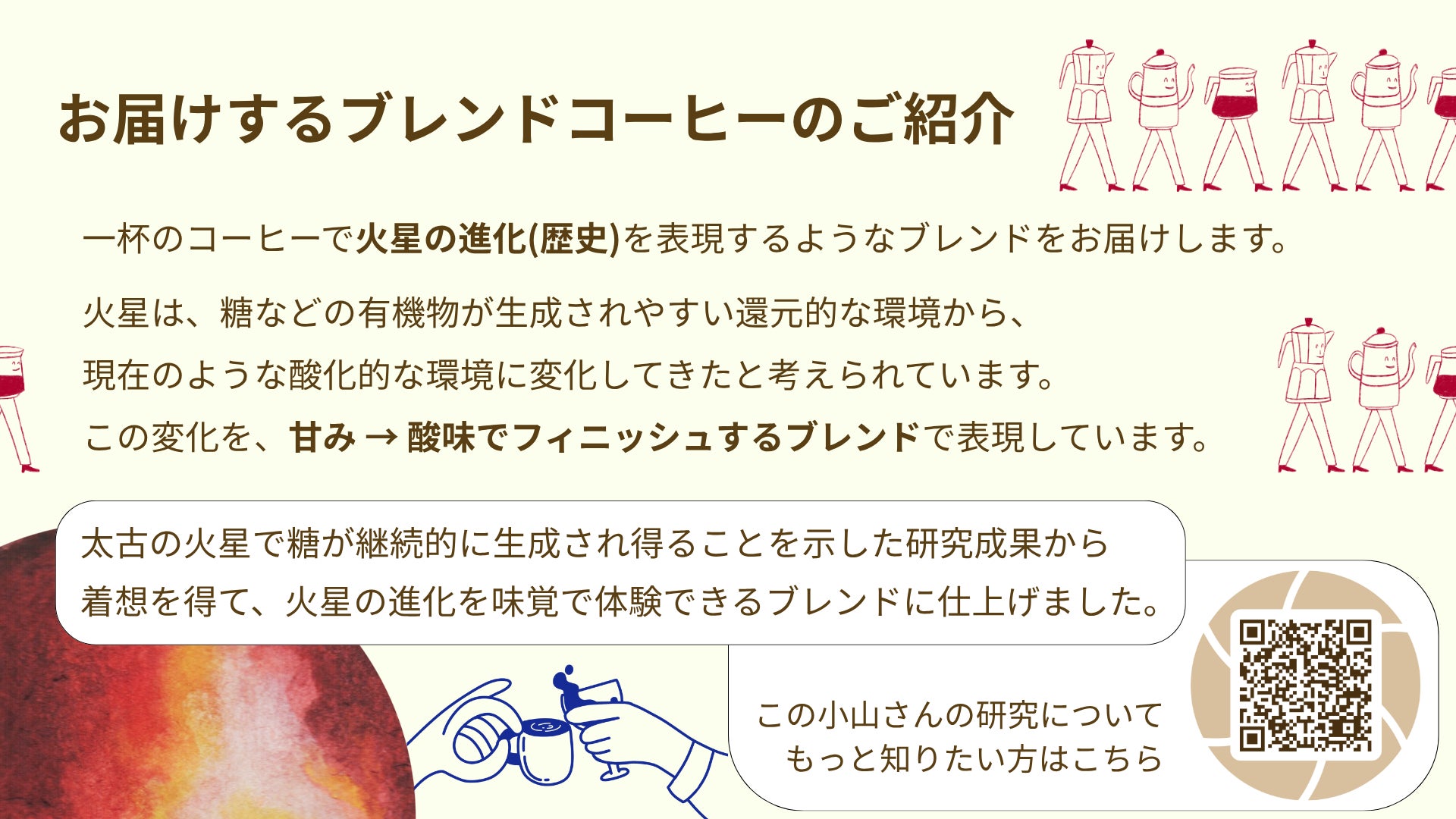
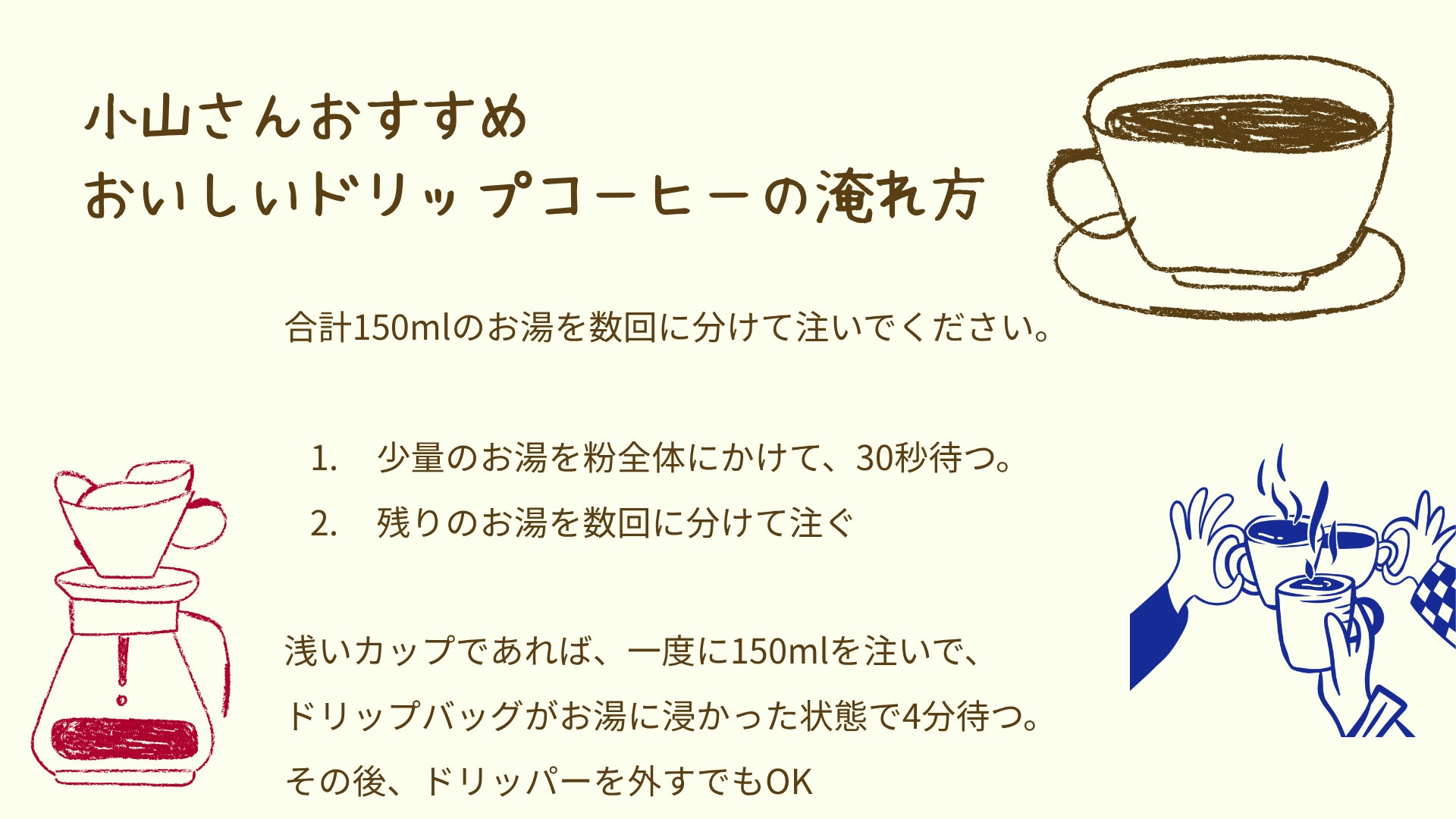
MARS AND COFFEE 様とのコラボ企画


MARS AND COFFEE オンラインストア | HP | instagram | X | note | podcast






最新の活動報告
もっと見る
第2回 日本学生ローバー大会 TRC 優勝
2026/04/02 15:21こんにちは、ARES Project です。昨年度に実施いたしましたクラウドファンディングでは、98人もの方にご支援いただき、無事目標金額であった150万円を達成することができました。ひとえに、皆様のお力添えに、メンバー一同、心より御礼申し上げます。さて、嬉しいご報告がございます。今月20日〜21日に鳥取砂丘にて開催された「鳥取ローバーチャレンジ(TRC)2026」エキスパート部門において、ARES Projectは優勝を果たしました。昨年度に行われた第1回大会においても優勝を達成しており、本大会で2連覇という結果を収めることができました!どんな大会なのか?本大会は、月面探査や月面基地建設に必要な無人探査ロボットの技術を競う競技会であり、国内外から学生チームが参加しました。高度かつ高負荷なミッションを実施するエキスパート部門には6チーム、基礎的な技術要素の習得を目的としたエントリー部門には17チームがエントリーしました。競技の内容競技では、「月面科学探査ミッション」「自律走行ミッション」「無人建設ミッション」の3つのミッションに挑戦しました。ミッション中にはロボットアームの把持部分におけるトラブルや通信干渉のトラブルに見舞われながらも現地での迅速な原因分析と役割分担による対応により復旧を果たし、最後までミッションを遂行することができました。その結果、総合力の高さが評価され優勝につながりました。大会を終えて今回の鳥取ローバーチャレンジ(TRC)は、ARES Projectにとって、URC優勝に向けた極めて重要な実践機会となりました。本大会は、最終目標であるURC優勝に向けたマイルストーンの一つと位置付け、連覇を目指して臨みました。その中で、これまでの長期運用では顕在化していなかったハードウェアトラブルが発生しました。これは連続稼働による疲労の蓄積に加え、設計段階では顕在化しにくい構造的弱点が露呈したものと考えられます。一方で、現場では迅速な対応によりミッション継続が可能となり、チームの対応力も発揮できました。この経験により、URC本番前に潜在的リスクを具体的に把握できたことは大きな収穫です。今回の知見をもとに、残り期間での目標が明確化されており、URCに向けた完成度向上に直結する重要な機会となりました。今後もチーム一同さらなる技術力・運用力の向上に努めてまいります。引き続き温かいご支援・ご声援のほどよろしくお願いいたします。 もっと見る
[ メンバーインタビュー No.16 ] ローバー電装:Richard
2025/12/28 21:36第16弾は、ローバー電装を担当するRichard。ARESに入りたいという強い動機で東北大学に入学を決めたというRichard。未経験だったにも関わらず勉強熱心な彼はローバー電装で重役を担っておりメキメキ成長中です。ものづくり系では珍しい大のディズニー好きで、週明けにはお土産と思い出話を持ってきてくれます!今後の制御班を引っ張っていくであろう期待のメンバーです!RICHARD : ローバー電装✴︎ ARES で担当していることARES Projectでは、ローバー本体の電装系の設計・開発を担当しています。 私は今年からこのプロジェクトに参加しており、開発はまったくの未経験だったため、ローバーの制御については右も左も分からない状態からのスタートでした。 それでも、先輩方にサポートしていただきながら少しずつできることを増やしていき、今では任せてもらえる仕事も増えてきました。自分の手がけた設計が形になったときは、非常に大きな達成感があります。 特に、自分が作ったものでローバーが動くようになるのが、この役職の一番面白いところだと感じています。活動を通じて、人とのつながりの大切さを改めて実感しました。技術だけでなく、支えてくれる人や協力してくれる人がいてこそ、挑戦を乗り越えられるのだと思います。✳︎ 大切にしていること“Making the impossible possible”この言葉はウォルト・ディズニー・イマジニアリング社が掲げる理念であり、私がものづくりに向き合ううえで常に意識している信念でもあります。周囲から「無理だ」と言われるような挑戦でも、想像力と技術力を駆使して形にしてしまうイマジニアたちの姿に憧れ、私もそんな存在になりたいと強く思うようになりました。ものづくりとは、現実に縛られず、理想を形にする挑戦の連続です。だからこそ私は、困難に直面したときこそ「不可能を可能にする」という姿勢を貫き、創造と技術の力で乗り越えていきたいと考えています。✴︎ 今後ARESで挑戦したいことまずは、URC2026で必ず優勝できる機体の設計に取り組むことが目標です。自分はまだまだ未熟ですが、日々成長を重ね、優勝に向けて貢献していきたいと考えています。そして次のステップとして、実際に月面や火星で活動する探査機の設計にも挑戦していきたいと思っています。 もっと見る
東北合宿 Day2
2025/12/28 07:58こんにちは、ARES Project のRichardです!12月下旬に実施した東北合宿2日目は、片平の拠点での作業を中心に活動を行いました。今回の合宿は、新機体であるARES9の機構が完成して2回目の合宿および実験でしたが、1日目の走行実験が順調に進んだこともあり、全体として終始穏やかな雰囲気の中で開発や実験が進められていきました。実験では、ローバーに搭載したカメラ越しでの模擬宇宙船のメンテナンスミッションを行い、ローバー本体の挙動やロボットアームの動作確認を行いました。また、合宿1日目の実験中に破損したロボットアームの把持部分について強度の再確認を行い、モニター越しでの操作性や作業精度についても検証を進めました。さらに、それぞれの部門ごとにも開発が着実に進められ、URC2026に向けて機体が徐々に完成へと近づいていることを実感しました。全体として昨年よりも順調にすすんでいる一方で、今回の合宿を通じて多くの改善点が明確になったため、今後の開発に活かしてより完成度の高い機体にしていければと考えています。合宿Day1レポートはこちらよりご覧になれます。 もっと見る







コメント
もっと見る