こんばんは!今回はイベント出展の告知なのですが、3月27日に合成音声系のイベント、ボイスコネクト2にメカニカルガールとして企業出展します。足立レイのグッズ等いろいろ作ったので、よろしければご来場ください。また、足立レイの脚部の展示をす...
こんにちは!今回は進捗報告とお知らせが2点あります。まず左脚開発の状況。現在左脚の膝部分に取り掛かっています。前回の報告のとおり右脚は一応ほぼ完成しているのですが、左脚開発の過程で改善点等も見つかったので、順次右脚にも反映させつつ左脚...
こんばんは!半年ぶりくらいになってしまいましたが活動報告です。まず、前回の活動報告直後ですが、今年4月9日、美少女ロボット開発企業、「合同会社メカニカルガール」を設立しました。2か月程前ホームページも作りました。こちらです!https...
このプロジェクトで作っている等身大ロボット足立レイの音声合成ソフトのクラウドファンディングを始めました!足立レイ 読み上げソフト「レプリボイス」制作プロジェクトリターンにはロボットの試作パーツ等を含んだものもあります。もしよろしければ...
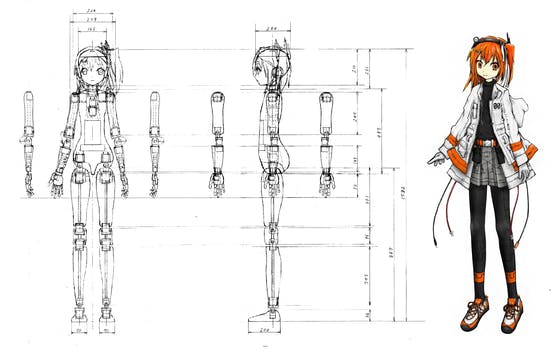
こんにちは。久しぶりに進捗報告です。現在主に脚部の開発をしています。こんな感じこの足、どういう作戦(設計思想)かというと、「既存の、パワーウェイトレシオ(重さに対するパワー)の高いサーボモーターで、少女型ロボットのプロポーションを崩さ...