 LINEで送る
LINEで送るラックに載せて高くすれば持ち上げやすくなるのか?
2019/02/18 12:10

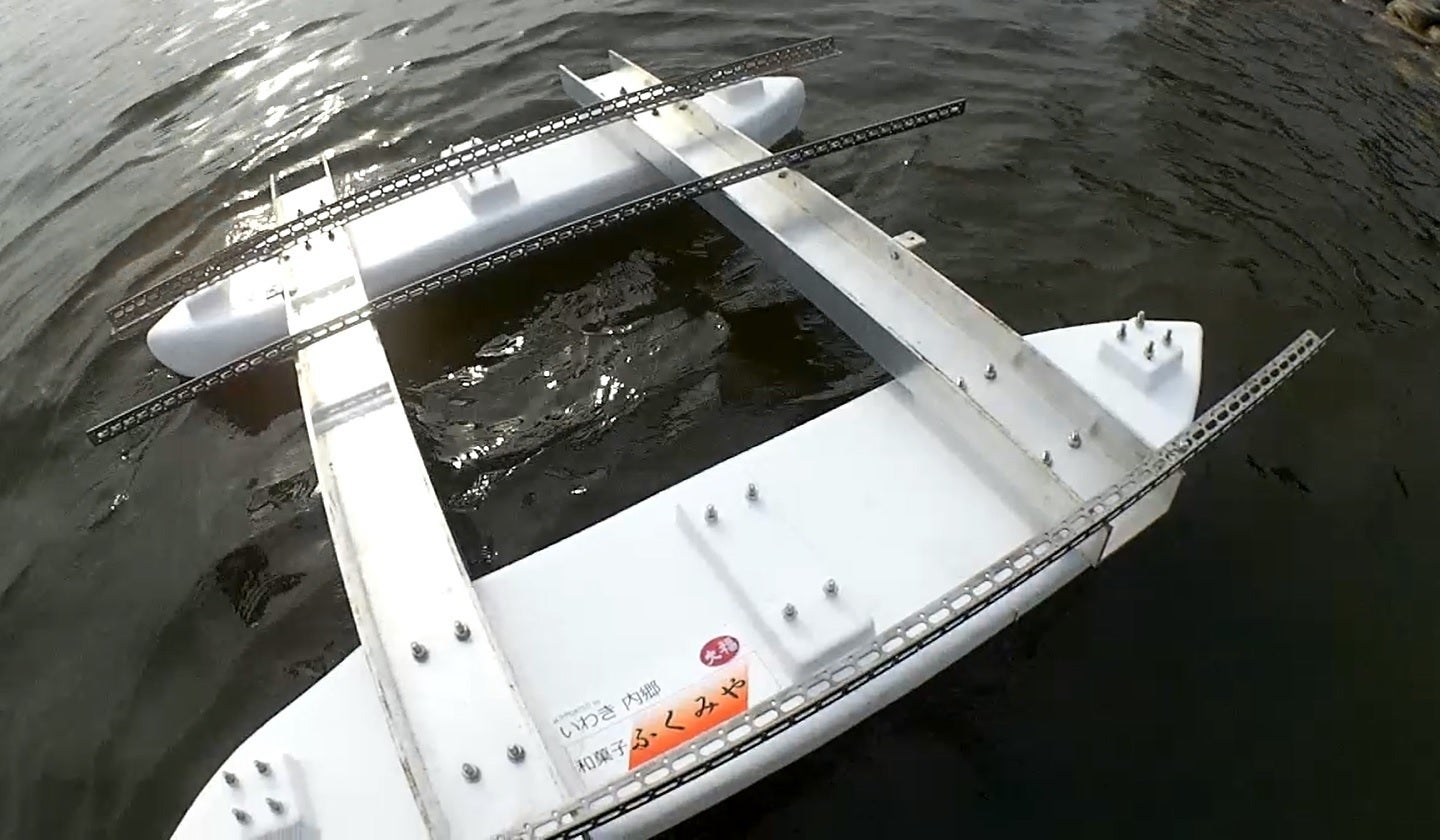
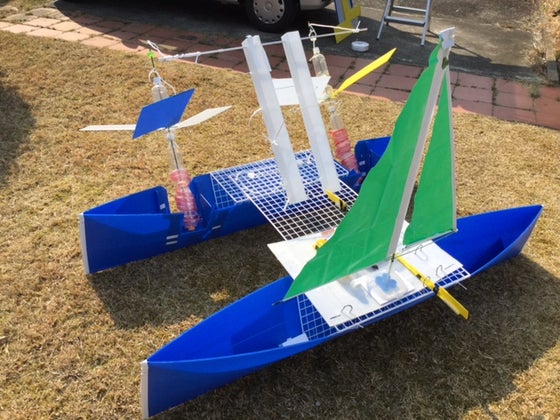
前回の投稿では、組み上げたものの踏ん張りが利かず船体を持ち上げられない、というところまででした(涙)。いろいろ考えたのですが、今あるものを削ったりして軽くする、というのは現実的に難しいです。水際で組んで引きずり下ろすことも検討しましたが、あまり船底を摺りたくない。で、地面レベルから持ち上げるから腰を大きく屈めてしまい力が入らないのか?少し高い位置で組み上げて、そこからセイルを立てて持ち上げればできるのか?を試すこととなりました。おなじみイレクターのパイプを"コ"の字型にし、真ん中に可動の突っ張り棒を追加。各脚にロープを渡して広がり幅を固定するという、最も手抜きな形状。4つ作って並べるとこんな感じ。ということで、組み上げて持ち上げてみました。重たいですが、何とか運べそうです。ゆくゆくは誰かに手伝ってほしい。